船舶多自由度水動力測試系統裝置的研制
2010-01-28 02:32:06,
船海工程 2010年4期
關鍵詞:測量
,
(華中科技大學 船舶與海洋工程學院,武漢 430074)
帆板動力主要來源于風力和水流的聯合作用。在外部自然條件和規定的板型情況下,帆板的初始靜浮態和運動姿態是決定運動狀態的關鍵因素,因此,試圖通過試驗尋求帆板姿態與其運動性能之間的規律,找出最佳狀態提供給運動員作為操控帆板的依據。在外力作用下,帆板運動是一種不穩定的多自由度的耦合運動。帆板在前進的過程中會產生升沉、轉首、俯仰等復合運動。建立固定在帆板上的直角坐標系,帆板在運動過程中的受力見圖1。

T-帆板受到的阻力;N-橫向力;Za-垂向升沉;Mz-繞z軸的轉矩;θ-帆板的縱傾角;φ-帆板橫傾角圖1 帆板運動時受力示意圖
精確測試帆板的受力狀況和運動姿態是試驗研究的關鍵。常規的試驗方法是加各種約束,將復雜運動分解為單一運動,即分成若干個不同的試驗來完成,如:阻力試驗、強制橫傾試驗和強制縱傾試驗,載荷測試等。這樣的試驗不僅費時費力,關鍵是忽略了各自由度運動之間的耦合影響而導致測試結果失真。
多自由度測量系統裝置由轉角機構、升降隨動系統和三分力天平三大部分組成,該裝置集模型拖帶、運動姿態測試和動力測試于一體,可真實模擬帆板的復合運動。
1 系統裝置工作原理及功能
船舶多自由度水動力測量系統裝置是由轉角機構、三分力天平傳感器、升降隨動系統、超聲波測距儀和傾角儀等組成,見圖2。
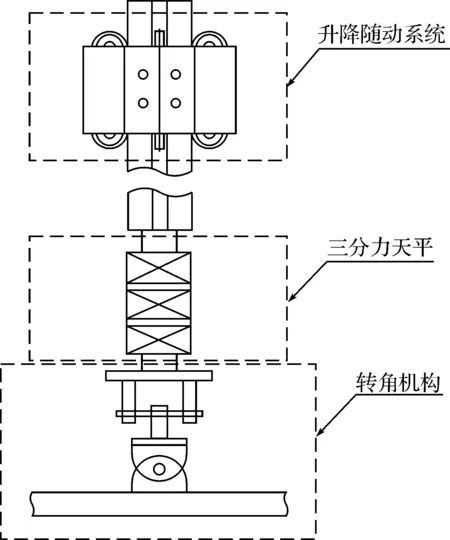
圖2 多自由度測量系統裝置示意圖
1.1 轉角機構
轉角機構與帆板之間采用的是萬向連接,以保證帆板能繞X軸、Y軸自由轉動。根據試驗需要調整帆板的壓載,改變帆板的初始縱傾角或橫傾角,測量出不同縱傾角和橫傾角組合的情況下帆板的運動性能,并找出最佳的縱傾角和橫傾角組合。
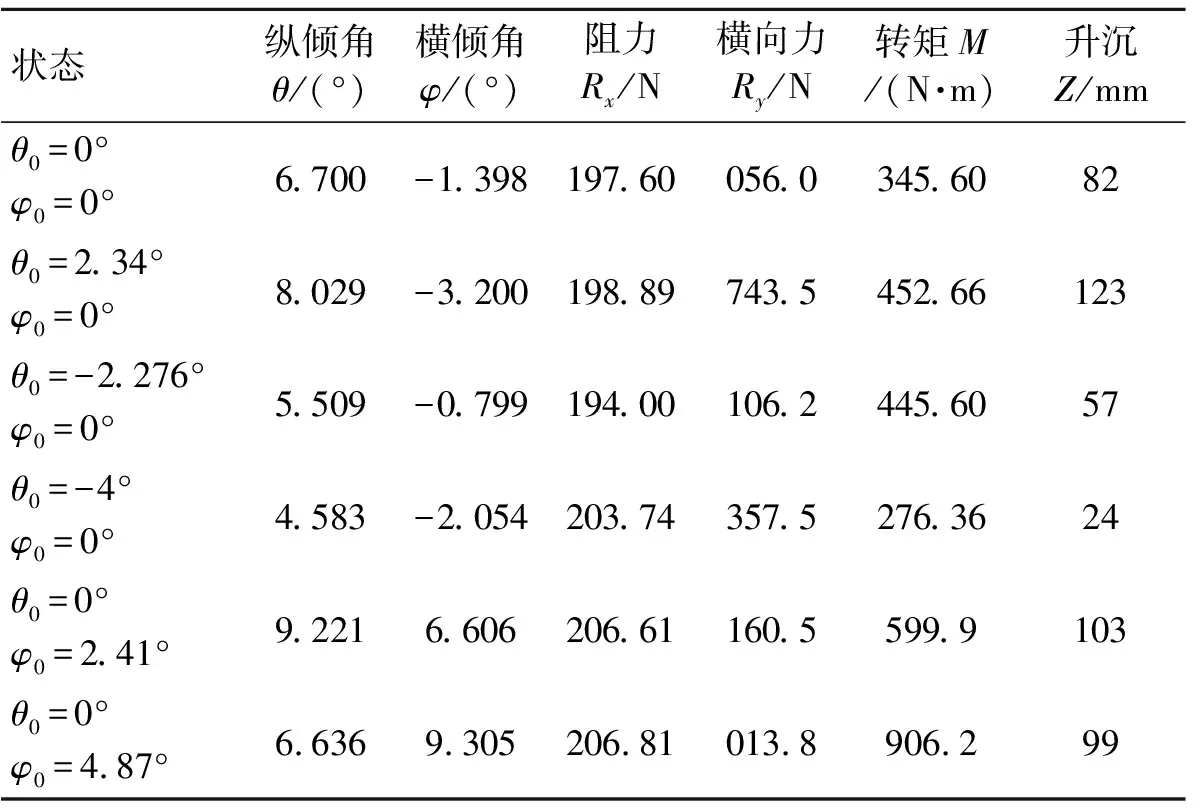
表1 帆板不同狀態下的試驗測試結果
1.2 三分力天平
該天平[1]可同時測量運動物體的阻力、橫向力和繞垂直軸的轉矩,并且這種結構干擾小,加工方便。
天平靜校。采用最小二乘法原理求出各主系數和干擾系數[2]。
1.3 升降隨動系統
為了保證物體在水動力的作用下能自由升沉,隨動裝置中共有8個可調軸承,其中升沉桿軸向4個平面互相垂直,桿與軸承之間最小可調到0.05 mm。當速度穩定后,隨動裝置起到天平固定點的作用,在升沉桿上端裝一塊平板,用超聲波測距儀測出升沉距離。升沉桿垂直于水面,通過裝置下端轉角機構與帆板重心連接,以保證帆板運動時測量的真實性。
1.4 裝置技術特點
通過轉角機構、升降隨動系統和三分力天平,將傳統的單一測試改變為綜合測量,反映了帆板的真實運動,保證了試驗數據的可靠和精度,并且大大縮短試驗時間。該套裝置可測量物體在靜水中的運動性能,亦可用于物體在波浪中的運動響應,安裝十分方便。
2 帆板試驗結果
新型帆板排水量90 kg,總長2.92 m,最大寬0.922 m。
帆板試驗主要內容是改變帆板的初始縱傾角或橫傾角,測量不同速度時的阻力、橫向力、扭矩、升沉及縱傾角和橫傾角,帆板速度為6.0 m/s時不同狀態的試驗結果見表1。
3 結論
1) 新型帆板隨著靜止縱傾角的加大,其阻力也增大,這一結論與傳統的米斯特帆板特性一致。
2) 帆板靜態縱傾角大,升沉值也大,與實艇操縱結果一致。
3) 橫傾角變化對帆板阻力影響不大,該特性優于米斯特帆板。
多自由度測量系統裝置真實地模擬了帆板的復合運動,測試數據精確可靠。該裝置在測試物體運動姿態的同時還可測量其橫向力和繞帆軸轉矩,彌補了適航儀只能測運動姿態的不足。
[1] 郝亞平.船舶性能試驗技術[M].北京:國防工業出版社,1991.
[2] 邵世明,趙連恩,朱念昌.船舶阻力[M].北京:國防工業出版社,1995.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
