補償裝置在高速磁浮系統(tǒng)中的應(yīng)用研究
2010-03-16 08:26:34唐連福
城市軌道交通研究 2010年6期
關(guān)鍵詞:系統(tǒng)
唐連福
(上海磁浮交通發(fā)展有限公司,201204,上海∥工程師)
補償裝置在高速磁浮系統(tǒng)中的應(yīng)用研究
唐連福
(上海磁浮交通發(fā)展有限公司,201204,上海∥工程師)
由于高速磁浮牽引采用大功率變流裝置,供電系統(tǒng)必須對系統(tǒng)運行時的諧波進行濾波,對無功分量進行調(diào)節(jié)。系統(tǒng)運行時對電網(wǎng)的無功和諧波進行補償與濾波是電網(wǎng)安全和系統(tǒng)正常運行的重要部分。分析了補償系統(tǒng)的構(gòu)建和控制原理。使用IGBT(絕緣柵雙極型晶體管)無功調(diào)節(jié)裝置將有利于補償系統(tǒng)滿足牽引系統(tǒng)補償?shù)目焖傩砸蟆T撗a償系統(tǒng)運行后能夠滿足電網(wǎng)質(zhì)量要求,但系統(tǒng)損耗和動態(tài)響應(yīng)尚需進一步優(yōu)化。
磁浮;濾波;動態(tài)補償;控制
Author's addressShanghai Maglev Transportation Development Co.,Ltd.,201204,Shanghai,China
目前世界上高速磁浮有常導(dǎo)磁浮交通和超導(dǎo)磁浮交通兩種技術(shù)。常導(dǎo)高速磁浮系統(tǒng)以常導(dǎo)電磁浮、長定子直線同步電機驅(qū)動,列車最高運行速度不低于200 km/h,主要包括磁浮線路、磁浮列車、牽引供電、運行控制以及車站和維護設(shè)施等子系統(tǒng)。
高速磁浮交通的牽引驅(qū)動采用的大功率高電壓變流裝置受控于輸出電源,系統(tǒng)運行時對電網(wǎng)的無功和諧波進行補償與濾波是電網(wǎng)安全運行和系統(tǒng)正常運行的重要部分。本文對此系統(tǒng)中的無功補償系統(tǒng)進行研究。
1 牽引系統(tǒng)特點及對供電系統(tǒng)的要求
磁浮列車的驅(qū)動由布置在分區(qū)端部的多套控制器和高中功率變流裝置組成。變流裝置根據(jù)指定的速度曲線和列車的實際位置輸出幅值、頻率,以及相位受控的電壓、電流,并通過變壓器、饋電電纜、線路旁的開關(guān)分段,為磁浮列車所在的長定子段(軌道梁上安裝的長定子線圈和車廂底部排列的直流勵磁繞組構(gòu)成直線同步電機)供電,實現(xiàn)列車的起動、加減速、定速和停車驅(qū)動,保證列車按照指定的速度曲線進行運行。
為磁浮列車提供驅(qū)動電源的變流裝置一般為交-直-交形式,整流部分為雙三相12脈波半控橋。因此在磁浮列車項目中,其運行系統(tǒng)必將需要大量的無功并產(chǎn)生大量諧波。供電系統(tǒng)如果不加處理,一方面需要在設(shè)計時加大對電網(wǎng)的容量需求,另一方面會由于磁浮運行時產(chǎn)生的諧波和大量的無功功率而導(dǎo)致電網(wǎng)品質(zhì)系數(shù)降低,以及電網(wǎng)電壓的波動嚴重超標(biāo)。因此系統(tǒng)中必須考慮配置大容量濾波和動態(tài)無功補償系統(tǒng),而且牽引系統(tǒng)的快速調(diào)節(jié)特性決定了動態(tài)補償系統(tǒng)必須具有快速的響應(yīng)。
2 補償與濾波系統(tǒng)的設(shè)計
2.1 母線單線圖
為安全可靠的運行,高速磁浮系統(tǒng)可采用雙回路供電系統(tǒng)。其母線帶載單線圖如圖1。
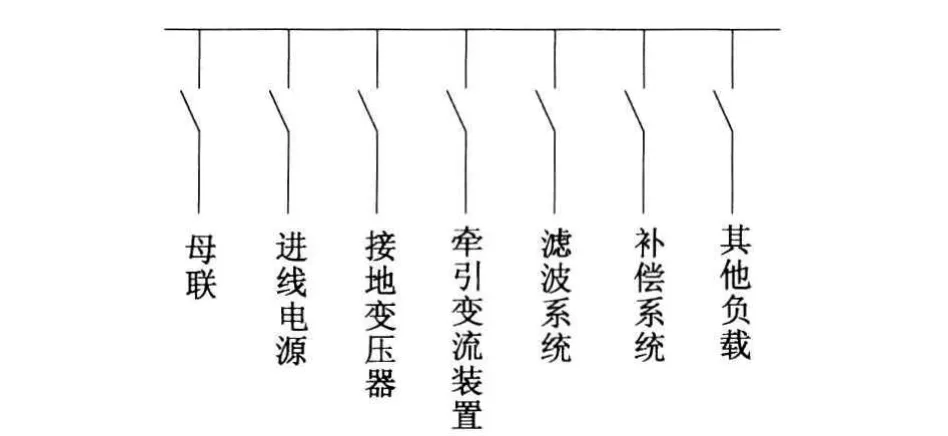
圖1 20kV單線圖
圖1中牽引變流裝置為主要負載,所占負載比重很大。諧波和動態(tài)補償系統(tǒng)就是為滿足牽引變流裝置的工作特性而設(shè)置的。諧波和動態(tài)補償系統(tǒng)必須能滿足牽引列車時牽引變流裝置所產(chǎn)生的諧波和無功壓降。
2.2 設(shè)計思想
根據(jù)變頻器帶車運行時的負載特性和上述電網(wǎng)數(shù)據(jù)計算,考慮當(dāng)前補償裝置的技術(shù)水平和今后運行的經(jīng)濟要求,采用濾波系統(tǒng)和動態(tài)補償系統(tǒng)相結(jié)合并采用變頻設(shè)計的LC電路進行諧波濾波;動態(tài)補償容量連續(xù)調(diào)節(jié)、動態(tài)補償裝置可采用基于IGBT器件的變頻器來快速實現(xiàn)調(diào)節(jié)的方案。
1)濾波裝置首先根據(jù)磁浮牽引變流裝置的運行狀態(tài)決定其工作狀態(tài),并與動態(tài)補償相結(jié)合。
2)諧波濾波波次和分量分別為:5次濾波補償量+1 Mvar;7次濾波補償量+1 Mvar;11次濾波及高通補償量+4 Mvar。
3)系統(tǒng)動態(tài)根據(jù)母線電網(wǎng)的負載進行母線側(cè)無功功率因素的控制。
4)動態(tài)補償由600 V等級(20 kV/600 V的變壓器)的10套容量為-600 kvar~+600 kvar的IGBT變頻器實現(xiàn)0~12 Mvar可調(diào)節(jié)容量。
3 濾波與動態(tài)補償系統(tǒng)
3.1 系統(tǒng)構(gòu)成
由以上分析可知,諧波和補償系統(tǒng)設(shè)計成如圖2所示形式。
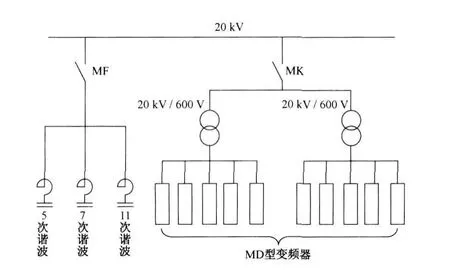
圖2 濾波和動態(tài)補償系統(tǒng)配置圖
其中諧波濾波次數(shù)為:5次、7次、11次和高通。每組濾波裝置配置靜態(tài)補償容量分別為1 Mvar、1 Mvar、4 Mvar。系統(tǒng)投運工作后,MF開關(guān)自動合閘,跟隨20 kV母線上的牽引變流裝置工作狀態(tài):牽引變流裝置啟動時,MF同步合閘;牽引變流裝置停止工作一定時間后,MF分閘。
動態(tài)補償系統(tǒng)由MK開關(guān)、變壓器2臺、600 V變頻器(600 kvar/臺)10套組成動態(tài)補償裝置。
3.2 控制原理
磁浮列車起動時,母線側(cè)隨著變流裝置的輸出電壓、電流和頻率等變化,產(chǎn)生諧波和電壓電流的相位偏差,系統(tǒng)的諧波量和功率因數(shù)發(fā)生了變化;動態(tài)補償系統(tǒng)的控制器根據(jù)檢測到的電壓、電流進行轉(zhuǎn)換計算得到系統(tǒng)的無功功率;把該數(shù)據(jù)與控制的設(shè)定值進行比較,送到控制系統(tǒng)的給定發(fā)生器進行PI(比例積分)調(diào)節(jié),構(gòu)成調(diào)節(jié)系統(tǒng)的主環(huán)。由于調(diào)節(jié)裝置采用IGBT變頻器,低壓側(cè)的動態(tài)響應(yīng)時間提高,母線側(cè)的功率因數(shù)會在一個較小的允許的波動范圍內(nèi)進行調(diào)節(jié)。
3.3 動態(tài)補償系統(tǒng)的調(diào)節(jié)控制框圖
根據(jù)上述原理設(shè)計動態(tài)補償系統(tǒng)總調(diào)節(jié)框圖如圖3。其中輸入為母線側(cè)的電流電壓檢測量。令∑Q與0相比,通過運算輸出調(diào)節(jié)指令直流側(cè)電壓給定Udset和母線側(cè)電流給定Ilset以總線方式發(fā)送給圖2中的IGBT變頻器組;各變頻器控制器根據(jù)收到的調(diào)節(jié)指令控制IGBT的PWM(脈寬調(diào)制)信號實現(xiàn)系統(tǒng)無功功率的動態(tài)調(diào)節(jié)。
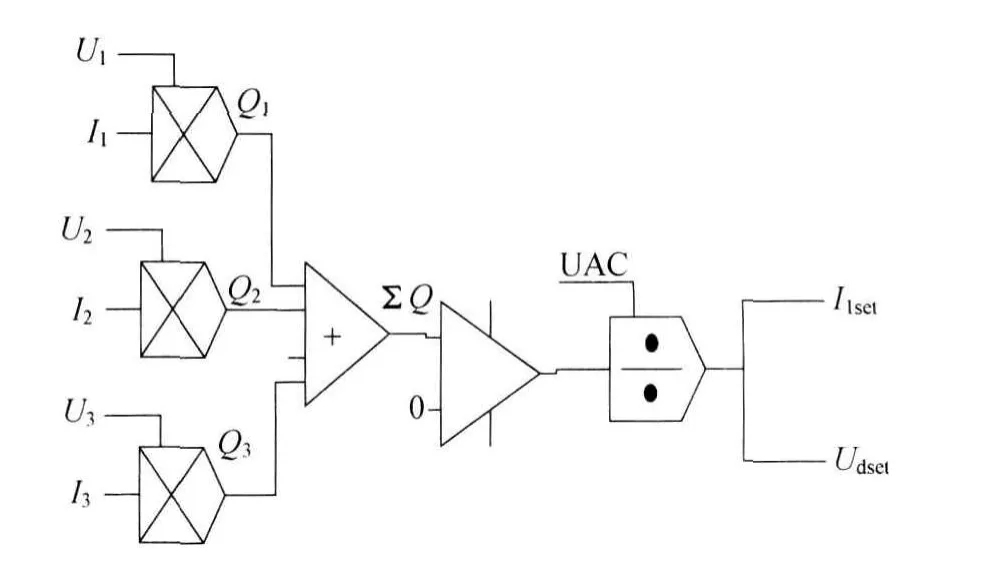
圖3 控制系統(tǒng)調(diào)節(jié)框圖
3.4 系統(tǒng)測試
系統(tǒng)測試獲得相關(guān)參量的運行曲線如圖4所示。
圖中各曲線依次(從上到下)為:
曲線①——系統(tǒng)對各補償變頻器的DC_LINK電壓給定值;
曲線②——各補償變頻器的DC_LINK電壓實際值;
曲線③——供電系統(tǒng)20 kV母線的電壓;
曲線④——供電系統(tǒng)20 kV母線的功率因數(shù)。
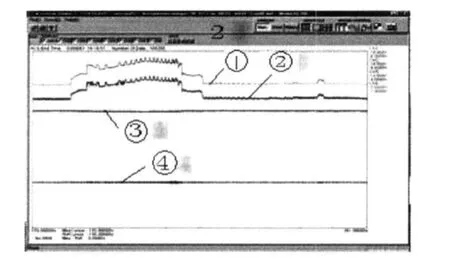
圖4 磁浮車一次循環(huán)運行時的補償系統(tǒng)曲線
由此可見:
1)在磁浮列車一列車運行的情況下,調(diào)節(jié)系統(tǒng)能夠滿足工況的要求,實現(xiàn)磁浮列車運行時的諧波濾波和功率補償?shù)淖饔?功率因數(shù)基本上維持在0.90~0.99間,20 kV母線側(cè)的電壓波動很小;系統(tǒng)的母線側(cè)響應(yīng)滯后接近50 ms左右,低壓側(cè)的控制響應(yīng)滯后約為10~15 ms左右。
2)由于磁浮列車運行存在間隔,動補裝置須補償諧波裝置的靜態(tài)無功量,補償系統(tǒng)在列車不運行時損耗過高。為減小系統(tǒng)損耗,在列車停運后,切斷諧波濾波裝置的母線側(cè)開關(guān)。
4 結(jié)語
綜上所述,濾波系統(tǒng)的靜態(tài)補償容量在磁浮列車運行間隔時需要動態(tài)補償系統(tǒng)進行負補償,導(dǎo)致動態(tài)補償系統(tǒng)的損耗過大,增加了運行成本。系統(tǒng)投資時的費用節(jié)省遠小于實際運行中長期產(chǎn)生的運行費用,降低了系統(tǒng)的經(jīng)濟性能。設(shè)計的動態(tài)補償器在AC 600 V低壓側(cè)的響應(yīng)較快,但母線側(cè)的響應(yīng)時間則相對滯后,影響了IGBT開關(guān)器件的快速性能在整個補償系統(tǒng)中應(yīng)有的優(yōu)勢。因此,從經(jīng)濟性和技術(shù)性上考慮,此補償系統(tǒng)存在進一步優(yōu)化的必要。
[1]吳祥明.磁浮列車[M].上海:上海科技出版社,2003.
[2]呂千云,程浩忠,何維國,等.高速磁懸浮列車系統(tǒng)的諧波分析[J].華東電力,2004,32(8):46.
[3]閆功勝.高速磁浮交通系統(tǒng)諧波抑制及無功補償措施[J].城市軌道交通研究,2008(8):59.
Application of Compensation System in High-speed Maglev Trans Rapid
Tang Lianfu
The harmonic of the power supply system must be filtered and the reactive power must be regulated,which are caused by the high-power propulsion converters applied in high-speed Maglev Trans Rapid.The structure and control fundamentals of the compensation system are analysed and described,which should match the requirements rapidly by using IGBT inverter.This filter and dynamic compensation system will have a better effect in Maglev Trans Rapid,at the same time,the system waste and dynamic response shall be improved.
maglev;filter;dynamic compensation;control
U 237+.8
2009-03-26)
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
