測量機器人自動化測量技術在橋梁監測中的應用
2010-03-30 06:31:24王明權朱清海
重慶建筑 2010年10期
王明權,朱清海
(重慶市勘測院重慶400020)
測量機器人自動化測量技術在橋梁監測中的應用
王明權,朱清海
(重慶市勘測院重慶400020)
介紹了測量機器人ATR技術原理和自動化測量技術的二次開發理論,并詳細闡述了測量機器人自動化測量技術在橋梁監測中的應用。
測量機器人;ATR;自動化測量技術;橋梁監測
1 測量機器人ATR技術原理
測量機器人(Survey robot)是一種能代替人進行自動搜索、跟蹤、辨識和精確照準目標并獲取角度、距離、三維坐標以及影像等信息的智能型電子全站儀。它是在全站儀基礎上集成步進馬達、CCD影像傳感器構成的視頻成像系統,并配置智能化的控制及應用軟件發展而形成的。
測量機器人采用了自動目標識別技術ATR(automatic target recognition),實現了普通棱鏡長距離自動識別與精確照準,為測量機器人自動化測量奠定了基礎。其工作原理如圖1和圖2,通過CCD影像傳感器構成的視頻成像和其他傳感器對現實測量世界中的目標進行識別,迅速做出分析、判斷與推理,實現自我控制,并自動完成照準、讀數等操作。
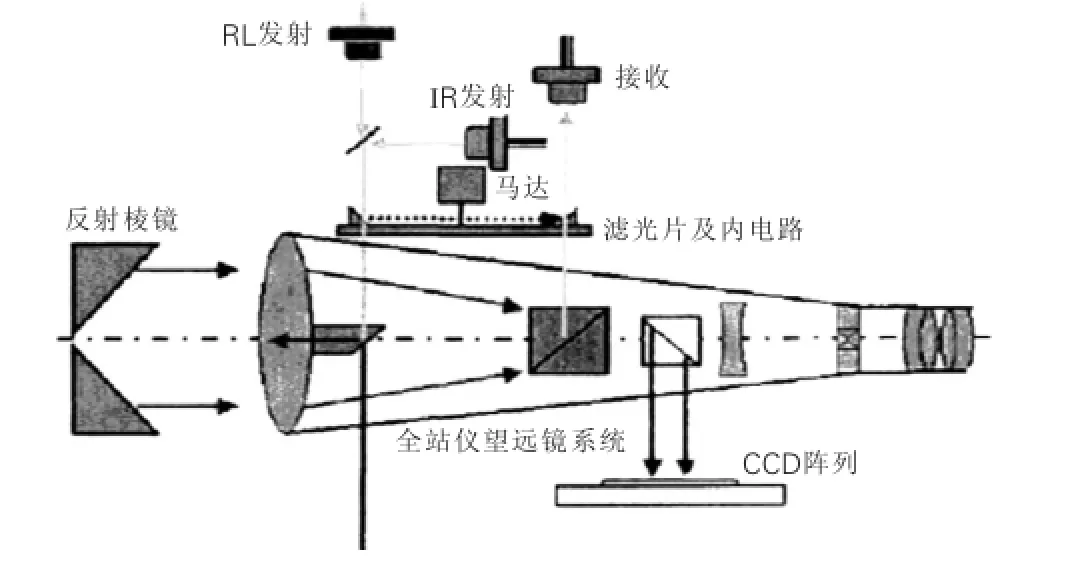
圖1 ATR工作原理圖
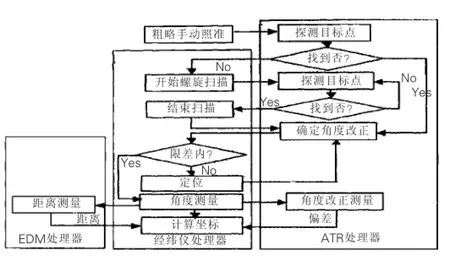
圖2 ATR工作流程圖
2 測量機器人自動化技術的二次開發
在橋梁監測中,多采用全站儀測邊測角方法對變形點進行觀測,獲取其幾何位移量的變化。通常采用人工觀測,存在觀測量少,其觀測精度受人為因素影響較大,作業效率低下的缺陷。為了實現橋梁監測的自動化,在測量機器人ATR技術上,結合橋梁監測的技術,開發適合橋梁監測的自動化技術。
測量機器人支持GeoBasic、GeoC++的二次開發,軟件內置在測量機器人上,通過調用其內部提供的函數可實現測量機器人自動觀測和數據的存儲等功能,結合后期的數據處理平臺實現監測數據的分析和處理。這種機載軟件模式僅實現測量機器人自動化采集功能,未實現實時的數據處理和分析,適用于恒載條件下的橋梁監測。
測量機器人提供了外部串行接口,通過GSI接口與指令,實現儀器內部參數的設置、讀取,實現向儀器輸入、輸出觀測數據;通過GeoCom接口,實現客戶端(外部應用程序)與服務器(測量機器人)的相互響應。這就為開發橋梁自動化監測系統提供了條件,實現實時自動化采集與數據處理,結合通訊技術,可對橋梁實現遠程無人值守的監測,適用于實時連續橋梁監測。
3 機載自動化技術在橋梁監測中的應用
3.1 外業數據采集
機載自動化技術的系統流程見圖3。
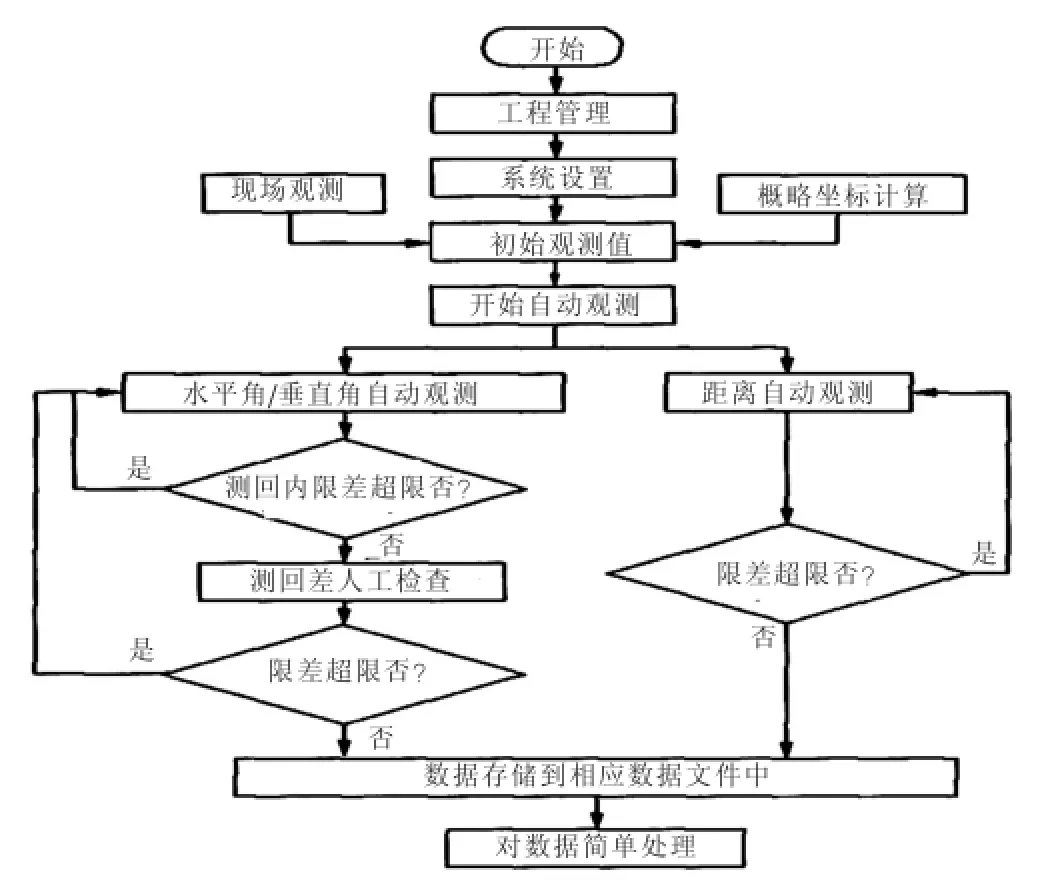
圖3 機載自動化技術系統流程圖
系統采用GeoBasic為開發環境,以Leica TCA2003為載體,共設置八個模塊,分別為工程管理、測量限差設置、初始化測量、測站設置、定向設置、自動觀測、角度測回差檢查、自動測距離,其界面如圖4所示。

圖4 機載自動化技術系統主界面
在自動觀測過程中,軟件自動根據設置的限差進行觀測精度控制,超限時自動給出提示并進行重測,在觀測條件發生變化無法找到目標時給出重試和人工觀測的選擇,從而保證了觀測的有序進行,同時也保證了數據的可靠性和及時性。
3.2 內業數據處理
內業自動化數據處理軟件采用數據庫技術存儲與管理數據,將各個測站的數據導入到一個統一的工程中進行管理,包括對各站數據進行整理、檢查、測站平差及將合格的角度、距離數據按規范規定的格式以標準外業手簿的形式自動輸出報表。其處理結構見圖5,界面見圖6。

圖5 數據處理結構圖

圖6 機載自動化技術的數據處理界面
4 遠程控制自動化技術在橋梁監測中的應用
遠程控制自動化系統基于GeoCOM應用開發接口,通過網絡技術實現遠程實時控制測量機器人進行自動變形監測,以及對監測過程中所采集的數據進行管理與處理的軟件系統。其系統構成如圖7所示。

圖7 監測系統組成框圖
系統基于網絡通訊技術與野外測量機器人建立連接,通過室內計算機進行工程管理、系統設置、制定觀測計劃,控制測量機器人進行觀測,并實時獲取觀測數據,進行數據分析、圖表繪制、報表輸出、超限報警,實現真正的無人值守觀測,提高了工作效率,降低了勞動強度與作業風險,能為橋梁健康安全監測提供保障,其系統主界面如圖8所示。
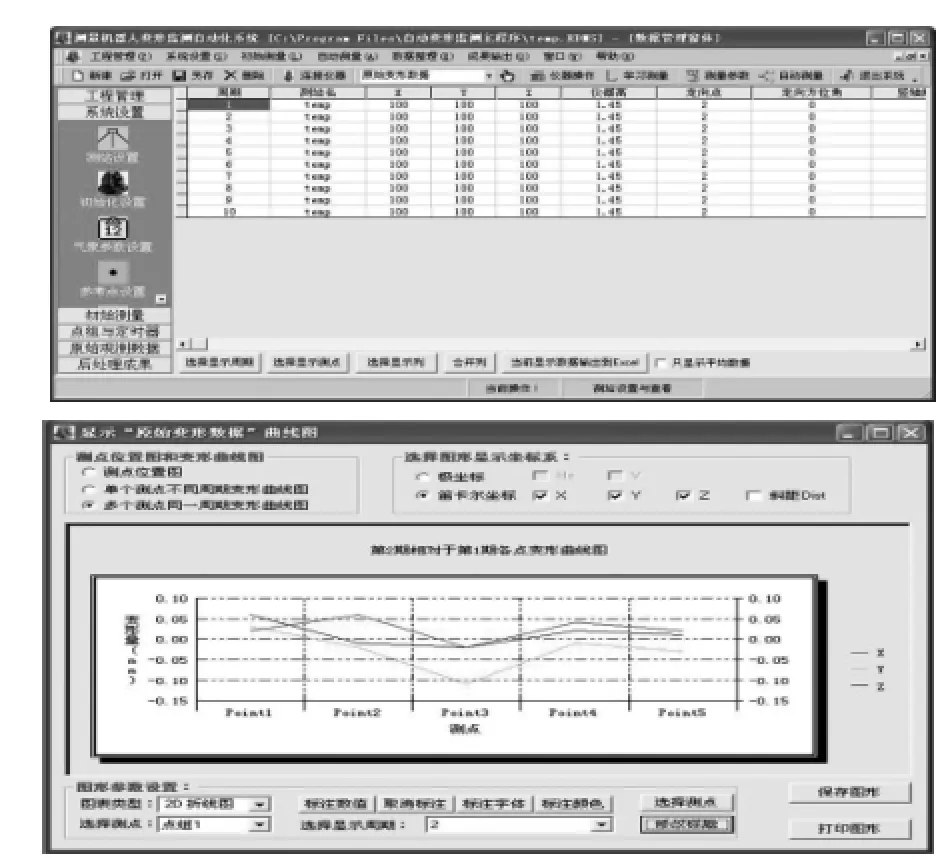
圖8 遠程實時控制監測系統界面
5 觀測精度比較
為了了解測量機器人自動化測量技術的精度,對重慶某橋變形點進行水平角觀測,并與人工觀測的數據進行比較,其比較結果見表1、表2。
從表1可知,其最大水平角較差為1.75″,滿足規范要求,表明機載自動化測量技術的觀測精度能滿足橋梁健康安全監測的要求。
從表2可知,其最大水平角較差為1.33″,滿足規范要求,表明遠程控制自動化測量技術的觀測精度能滿足橋梁健康安全監測的要求。
6 結束語
測量機器人自動化測量技術觀測精度可靠,滿足規范要求,適用于橋梁健康安全監測。特別是基于測量機器人遠程控制自動化技術實現了自動化觀測、智能化控制功能,可實時進行數據傳輸、數據分析、圖表輸出、超限報警,實現無人值守觀測,提高了工作效率,降低了勞動強度與作業安全風險,能為橋梁的健康安全檢測提供可靠保障。
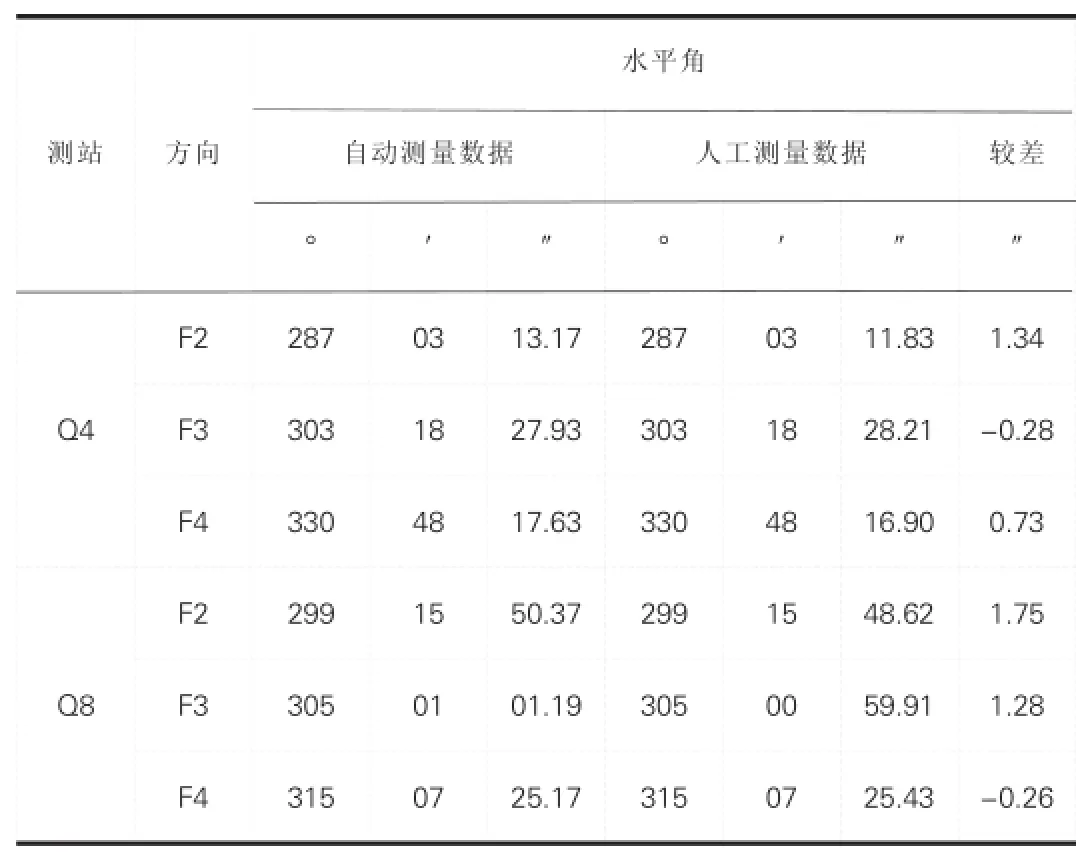
表1 機載自動化測量技術測量數據與人工觀測數據比較表
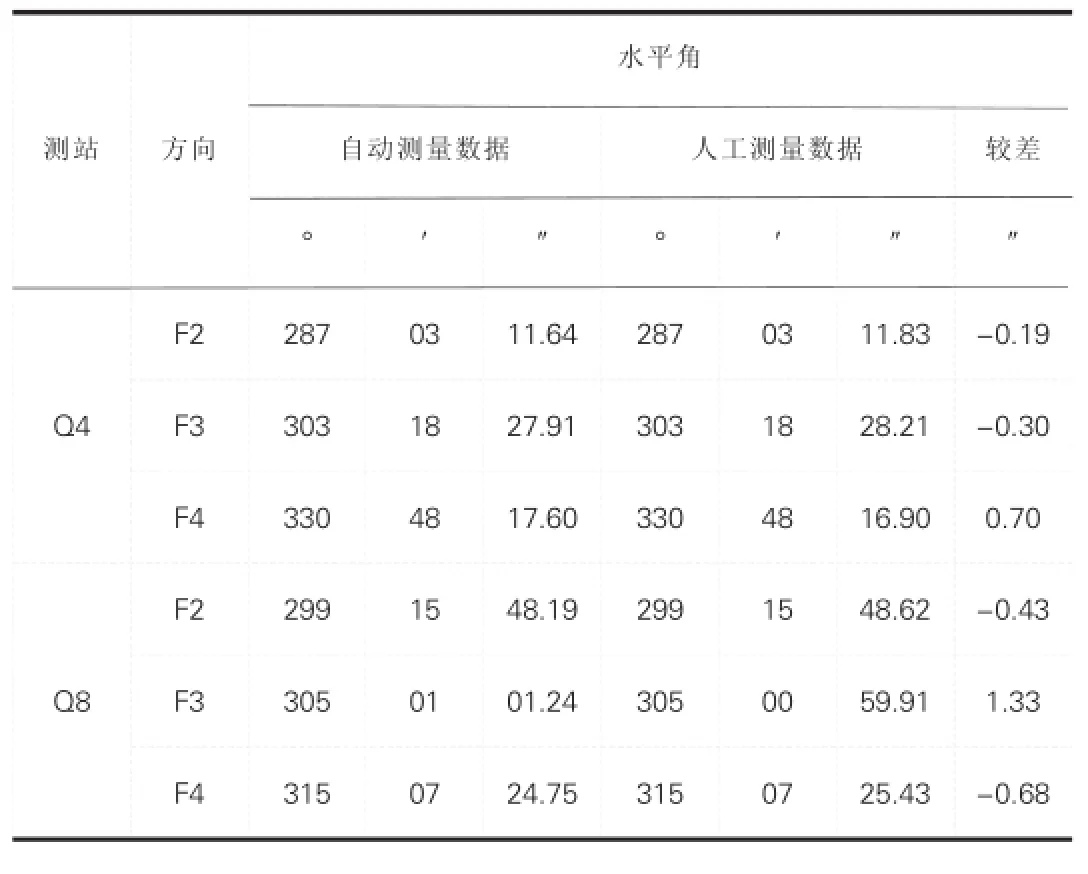
表2 遠程控制自動化技術測量數據與人工觀測數據比較表
[1]張正祿.測量機器人介紹[J].測繪通報,2005,(5):17.
[2]郭際明,梅文勝,張正祿,黃全義.測量機器人系統構成與精度研究[J].武漢測繪科技大學學報,2000,25(5):421-425.
[3]梅文勝,張正祿,郭際明,黃全義.測量機器人變形監測系統軟件研究[J].武漢大學學報,2002,27(2):165-171.
責任編輯:余詠梅
Application of Automation Measurement Technology of Survey Robot in Bridge-Monitoring
This article describes the principle of ATR measuring technology of Survey Robot and automation measurement theory of its Secondary Development,and detailed applications of automation measurement of survey robot in bridge-monitoring are expounded in the full text.
survey robot;automatic target recognition;automation;measurement technology;monitoring of bridges
TU18
:A
:1671-9107(2010)10-0046-03
10.3969/j.issn.1671-9107.2010.10.046
2010-6-24
王明權(1972-),高級工程師,主要從事測繪技術、質量管理工作。
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
湖南教育·A版(2019年4期)2019-05-10 03:31:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
山東工業技術(2016年15期)2016-12-01 05:31:04
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國慣性技術學報(2015年1期)2015-12-19 13:12:17