基于EASY5的船舶舵機電液伺服系統建模與仿真
2010-04-01 13:37:34包青
江蘇船舶 2010年1期
包 青
(南京板橋汽渡管理處,江蘇南京 210012)
0 引言
舵機是保持或改變船舶航向,保證安全運行的重要設備,目前稍大一些的船舶大部分采用液壓舵機。液壓舵機分為閥控型和泵控型兩種。閥控型舵機系統簡單、造價低、控制方便,但傳統大多采用一般的換向閥,液壓沖擊較大,可靠性較低。隨著自動化技術和液壓技術的發展,電液伺服系統以其控制精度高、響應速度快、信號處理靈活、輸出功率大等優點[1],在船舶舵機系統中應用越來越廣泛。計算機仿真技術的發展,使得液壓系統的動、靜態特性可以通過仿真分析來得到。但傳統的仿真一般是先建立數學模型,然后再進行仿真分析,對工作者要求較高并且十分復雜。而采用EASY5軟件進行的圖形化建模方法,只需按要求連接組建和設定參數,無需建立數學模型,并且EASY5采用多種“開-關狀態”判斷邏輯處理非線性和不連續狀態方程,結合多種改進的變步長、定步長積分算法,使得分析結果逼真、可信[2]。本文采用 EASY5對某船舶舵機電液伺服系統進行建模并仿真,分析了系統的動、靜態特性,分析結果對熟悉系統性能,優化系統提供了理論依據。
1 舵機電液伺服系統的組成和工作原理
舵機電液伺服系統主要由油源、濾器(粗濾器、精濾器)、溢流閥、電液伺服閥和油缸等組成。在該系統中電液伺服閥起電信號和液壓信號之間的轉換作用,同時又起信號放大作用,其性能的優劣對系統的控制精度、系統的穩定性及可靠性影響很大,是系統的核心元件[3]。其液壓系統原理圖如圖 1所示。
該舵機電液伺服系統具有完全相同的左右兩套液壓回路,在不同工況下可以單機工作也可以雙機組并聯工作。單機工作時,從油泵P1輸出的壓力油經精濾器 F1后,清潔的液壓油進入串接的電液伺服閥,當電液伺服閥收到來自操舵儀的放大控制電信號時,電液伺服閥的閥心移動,輸出液壓能源進入油缸C1,使油缸C1活塞桿產生位移,從而推動轉舵機構,使舵葉轉動。舵機轉動方向及角度由操舵儀給定信號決定,當舵機到位時,控制信號與反饋信號的偏差為 0,放大器沒有輸出信號,電液伺服閥回到 0位(中間位置),舵機便停止在被控制的位置上,系統的壓力由溢流閥YR1決定。此外,當油箱液位低于某一指定值時,液位繼電器KY1接通報警,提示管系泄漏或油液自然耗損。當精濾器 F2進出口壓力差大于0.35MPa時,差壓繼電器KP1接通報警,提示應更換濾芯。

圖1 舵機電液伺服系統原理圖
2 在EASY5中模型的建立
根據系統的組成,在EASY5中建立單機運行工況下的仿真模型如圖 2所示[4]。建模中系統主要參數的設定如下:泵的轉速為150r/min;每轉排量為150cm3/r;管路的水力直徑為1cm;伺服閥的自然頻率為120Hz;阻尼比為 0.8;油缸無桿腔面積為25cm2;有桿腔面積為12.5cm2;負載等效彈簧剛度為100N/cm。
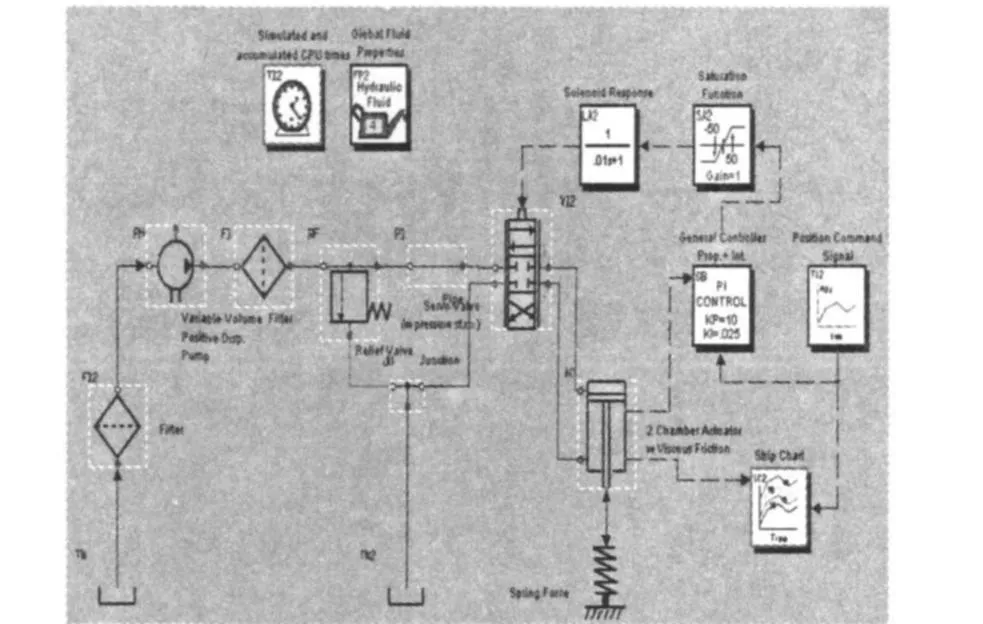
圖2 舵機電液伺服系統在EASY 5中的仿真模型
3 仿真與結果分析
實際操舵時,系統輸入的是舵轉動的角度信號,其與活塞桿的位移信號存在一一對應關系,以舵角轉動 5°的情況為例進行仿真分析。當舵角轉動 5°時,活塞桿移動 10cm,設定系統活塞桿位移按照圖3所示的指令信號運動。仿真運行 20s,采用吉爾算法,為表示方便,無桿腔用“extend”,有桿腔用“retract”表示,指令位移信號用“commandposition”表示,活塞桿反饋位移信號用“actuatorposition”表示。在 1s時,系統突加一個舵角轉動 5°的信號,當舵角轉動到5°時(活塞桿移動10cm),保持5°舵角到16s;16~18s時,緩慢移動舵角回歸 0位;18~20s時舵葉在 0位保持不動。
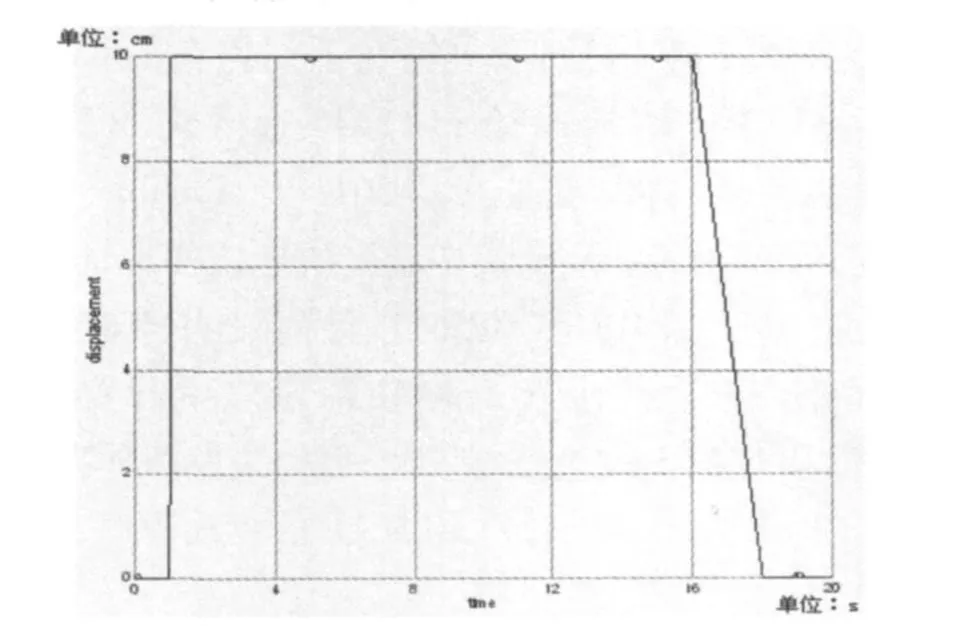
圖3 與舵角指令對應的位移指令信號
圖4~圖 5為系統中一些參數的仿真結果。
從圖4中可以看出:控制信號與反饋信號曲線非常相近,說明系統能很好地執行轉舵信號。在系統突加一個 5°的轉舵信號時,系統響應過程大約經歷了0.7s,過渡過程反映了系統的動態特性,說明系統過渡過程品質良好。當平穩操縱舵角回歸 0位時,系統能夠準確地執行發出的舵角信號指令。

圖4 指令信號與活塞桿反饋位移信號比較
圖5中可以看出:在突加轉舵信號時,系統的壓力波動較大。當到達指定舵角位置后,液壓缸兩腔壓力能夠很快達到穩定,并且壓力波動角小,說明伺服閥的比例增益適當,動態特性較好。當慢施加轉舵信號時,系統壓力波動較小,與實際情況吻合。
在仿真過程中,某些參數設定的好壞對系統的性能影響很大,比如伺服放大器的放大倍數(Ka)就直接影響到輸出油液的壓力和質量流量;還有活塞的位移。圖 6~圖 8給出了在不同的積分環節放大倍數下系統活塞桿位移隨時間的輸出特性。

圖6 Ka=5時位移特性

圖7 Ka=15時位移特性

圖8 Ka=30時位移特性
從圖6、圖7、圖8的比較中可以發現,若放大倍數過大,系統的響應速度很快,但是穩定性較差;放大倍數過小,則響應速度又太慢,也不是所期望的。在EASY5中可通過參數的穩態分析功能,得出在Ka=10時,系統的過渡品質良好,這種分析方法對優化系統性能有重要參考價值。
4 結論
本文以某船舶舵機電液伺服系統為研究對象,采用EASY5仿真軟件建立了其動態過程仿真模型并進行了仿真分析,仿真結果與實際運行情況基本一致,反映了所建模型的正確性,也很好地反映了整個系統的特性。仿真過程中可及時修改參數,并能直觀地得出仿真結果,方便實用,同時利用EASY5獨特的穩態掃描分析功能,可方便地分析出系統中某些參數變化對系統穩態的影響,這對船舶舵機液壓系統的性能分析和優化設計有著重要的意義。
[1] 雷天覺,等.新編液壓工程手冊[M].北京:北京理工大學出版社,1998.
[2] 程鋼,王紅巖,王良曦.基于MSCEasy5的車輛液壓控制閥動態特性仿真[J].計算機輔助工程,2006,15(S):163-164.
[3] 趙平格,等.液壓傳動與控制[M].北京:冶金工業出版社, 194-197.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22