
高速公路主線最佳行駛速度綜合算法*
2010-04-10 10:42:30陳大山李克平
武漢理工大學學報(交通科學與工程版) 2010年6期
陳大山 孫 劍 李克平
(同濟大學道路與交通工程教育部重點實驗室 上海 200092)
0 引 言
高速公路主線可變限速控制是提高高速公路主線行車安全和交通效率的重要措施,在各國得到廣泛的應用.可變限速的速度值應該隨著交通狀況、天氣狀況和路面狀況的變化而發生相應的變化.車輛行駛的速度分布越離散,交通事故的風險越大[1-2],提供可參考的最佳行駛速度,可以使得車速分布相對集中,影響最佳速度值的因素是多方面的,其計算方法也有所不同,傳統的計算方法有2種:(1)統計法,是依據統計數據確定最佳速度值,所以實時性較差;(2)數學模型法,是靠建立數學模型來計算,其模型的建立和各項參數的確定也比較困難.鑒于此,國內外許多學者采用了智能控制的方法來研究可變限速控制[3-4],在此基礎上,文中給出的最佳速度綜合算法,是針對高速公路主線實際情況,充分利用實時檢測到的交通狀況、環境狀況等與速度密切相關的信息,先按照模糊規則進行模糊推理,再應用神經網絡來記憶和學習模糊規則,同時使用遺傳算法對神經網絡的初始權值進行標定,避免其陷入局部極值,加快收斂速度.由此得到的最佳速度實時性好,準確性高,可為高速公路主線可變限速控制提供可靠的依據,產生良好的經濟效應[5-6].
1 模糊設計
最佳速度模糊控制器的輸入量有2個,即路段上的車輛數量和行車環境綜合評價指標值;輸出量只有一個,即高速公路路段的車輛最佳行駛速度,如圖1所示.其中,行車環境綜合評價指標值采用模糊邏輯得到一個具體的指標值,行車環境綜合評價指標值的模糊控制器的設計如圖2所示.
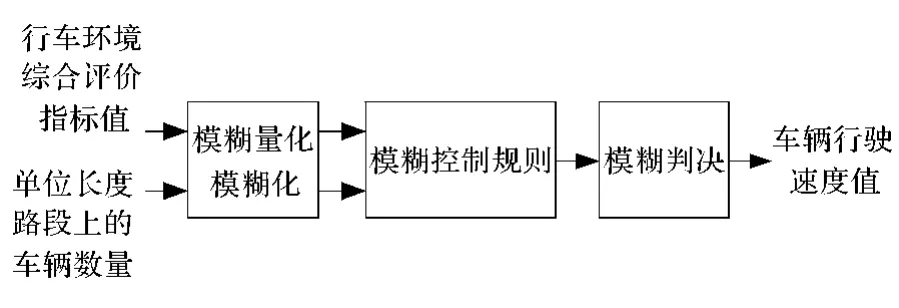
圖1 最佳行駛速度模糊控制器

圖2 行車環境綜合評價指標值模糊控制器
行車環境綜合評價指標值模糊控制器的輸入量有兩個,分別為天氣指標值和路況指標值,因為天氣和路況的確定存在一定的模糊性,對于天氣的描述分為5個語言變量:w1(差),w2(較差),w3(一般),w4(較好),w5(好),其取值范圍為 0~10,越大天氣越好;對于路況的描述也分為5個語言變量:r1(差),r2(較差),r3(一般),r4(較好),r5(好),其取值范圍為0~10,越大路況越好.同時,v(行車環境綜合評價指標值)分為:v1(低),v2(較低),v3(一般),v4(較高),v5(高)5個語言變量值,值范圍為0~10,越大越好.
模糊推理規則為

其中:i=1,2,3,4,5;j=1,2,3,4,5;k=1,2,…,25;共有25條規則.行車環境綜合評價指標值的模糊規則表如表1所列.
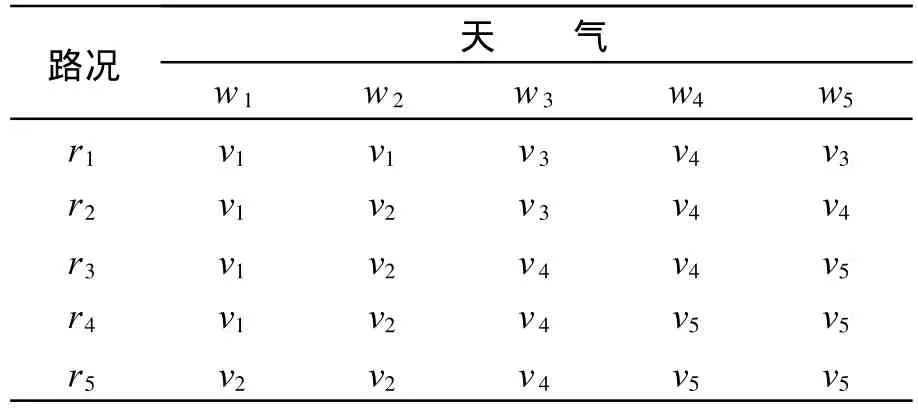
表1 指標值模糊規則表
對于車輛行駛速度模糊控制器,與行車環境綜合評價指標值模糊控制器類似,在此不贅述.
行車環境綜合評價指標控制器的輸入語言變量有2個為天氣和路況,天氣、路況描述隸屬度函數曲線如圖3所示,圖4為行車環境綜合評價指標值的隸屬度函數曲線,圖5為該模糊推理系統的輸出曲線,圖6為最佳速度模糊推理系統輸出曲線;隸屬度函數全部采用正態型,清晰化計算采用最為常用的加權平均法.

圖3 天氣、路況描述隸屬度函數曲線
2 遺傳算法優化BP神經網絡權值
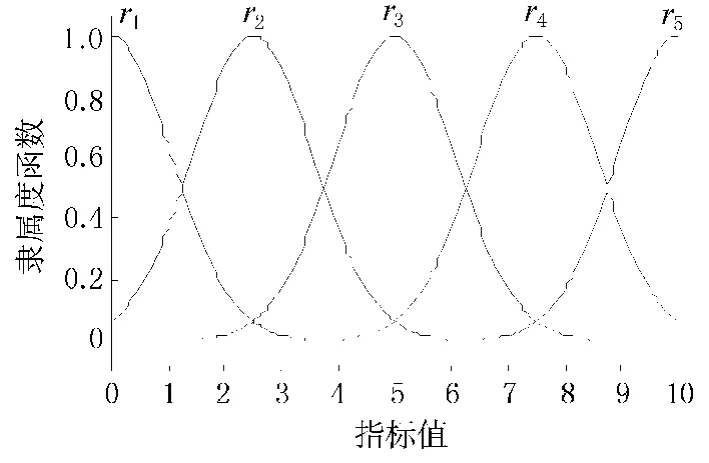
圖4 指標值隸屬度函數曲線
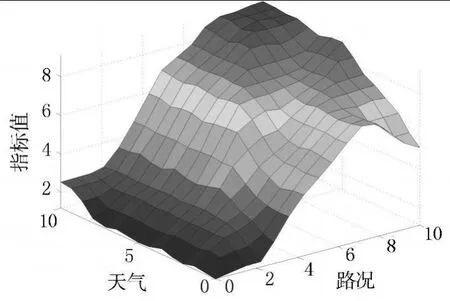
圖5 指標值模糊推理系統輸出曲面
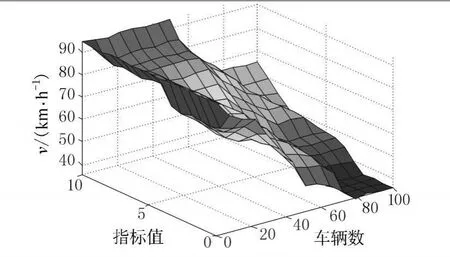
圖6 速度模糊推理系統輸出曲面
BP神經網絡具有高度非線性和較強的泛化能力,但也存在收斂速度慢、迭代步數多、易于陷入局部極小和全局搜索能力差等缺點.采用遺傳算法對BP神經網絡的權值進行優化,首先是在解析空間找出較好的搜索空間,再用BP網絡在相對較小的搜索空間內搜索最優解,這樣就可以防止BP神經網絡陷入局部極小,使得收斂的速度更加的快,迭代的步驟相對的減少(見圖7).
BP神經網絡限速控制模型中,輸入變量有兩個,一個是單位長度上車輛數量n,另一個是行車環境綜合評價指標值v,輸出變量為速度的限制值s,因此輸入層神經元為2個,輸出層神經元為1個.在確定了輸入輸出變量后,需要進行尺度變換,尺度變換常常將它們變換到[-1,1]或[0,1]的范圍;采用 Matlab函數 premnmx(),tramnmx()和函數postmnmx()進行相應的數據變換處理,隱含層的神經元數目為10個.
遺傳算法的主要參數選定為:種群n=100,遺傳交叉率Pc=0.5和變異率Pm=0.06,適應度函數為
式中:μi為期望的控制輸出值為控制的輸出值.遺傳算法訓練BP神經網絡權值的數據源來源于最佳速度模糊推理系統產生的300組數據.
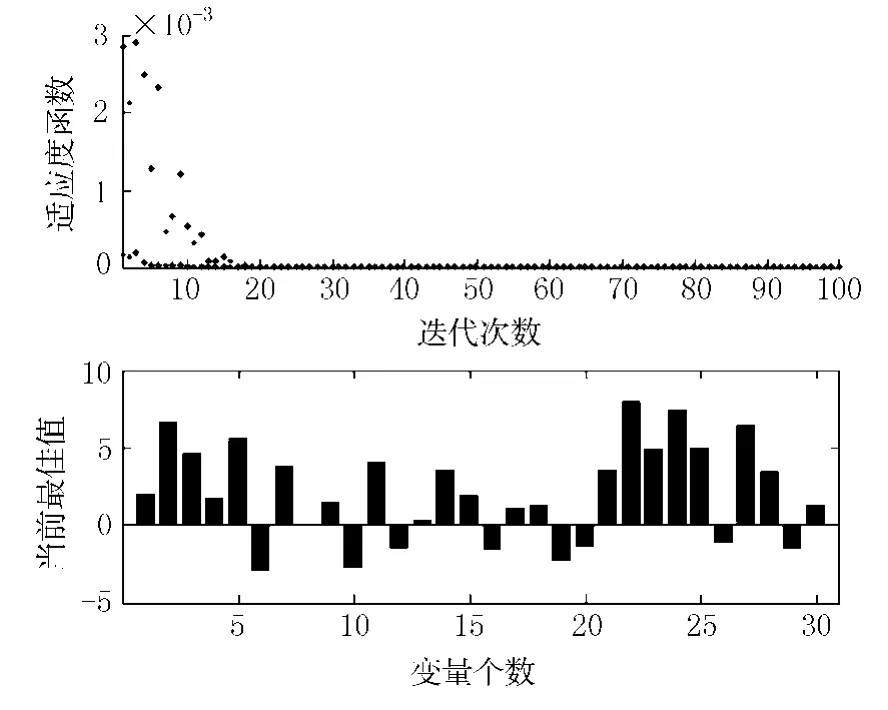
圖7 遺傳算法標定神經網絡權值
3 仿 真
應用標定好初始權值的BP神經網絡來學習和記憶最佳行駛速度模糊推理系統,400組數據來源于最佳行駛速度推理系統產生的新數據.圖8和圖9分別是未優化權值和優化權值的BP神經網絡誤差訓練曲線.
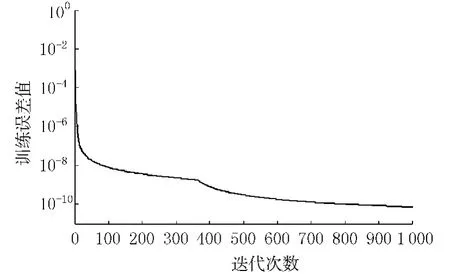
圖8 未優化權值訓練誤差曲線

圖9 優化權值后訓練誤差曲線
設仿真時選定時間點 21個,此路段最高限速為100 km/h,時間間隔為10 min,路段上的車輛數、天氣、路況和仿真輸出速度見表2所列.
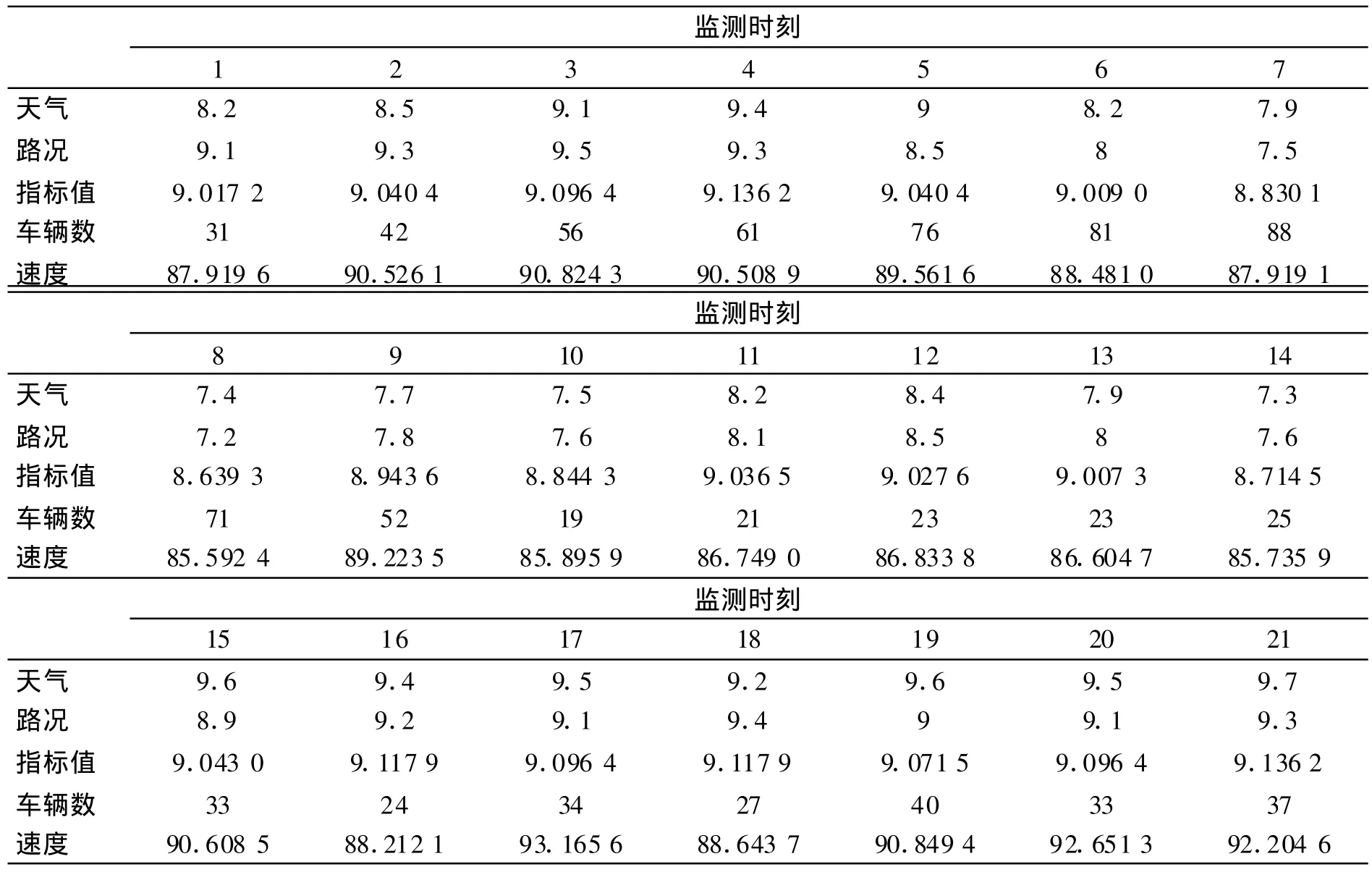
表2 最佳行駛速度仿真
由仿真結果可以看出,隨著交通量、天氣狀況和路面狀況的變化,可變限速的速度值發生了相應的變化.通過可變限速標志,把最佳行駛速度參考值提供給駕駛員,可使車速分布相對集中,減少駕駛員駕駛強度,從而降低交通事故的風險.
4 結束語
高速公路車輛的不合理的行駛速度是影響通行能力和誘發交通事故的重要原因,確定合理的最佳行駛速度具有重要的意義.本文闡述的綜合算法,充分利用與速度密切相關的天氣狀況、道路狀況與交通狀況來確定最佳行駛速度,克服了傳統算法的缺陷,為最佳行駛速度的確定提供了更為科學的方法,為高速公路可變限速控制提供了更合理的依據,可使高速公路通行能力增加、行程時間減少,并且有效的減少事故的發生和降低駕駛員的駕駛強度.如何把影響行駛速度的主觀、客觀因素進行更加詳細的分析和建模,以及可變限速對安全的影響評價是本文下一步研究的方向.
[1]裴玉龍,程國柱.高速公路車速離散性與交通事故的關系及車速管理研究[J].中國公路學報,2004,17(1):74-78.
[2]Liu G.Provincial wide travel speed and traffic safety study in Saskatchewan[J].T ransportation Research Record 1595,1997:8-13.
[3]梁新榮,劉智勇,毛宗源.高速公路模糊神經網絡限速控制與仿真研究[J]公路交通科技,2005,22(11):123-125.
[4]李寶家,黃小原.高速公路交通的變速限模糊控制[J].控制工程,2002,9(3):45-47.
[5]Krause B.Intelligent highway by fuzzy logic:congestion detection and traffic control on multi-lane roads with variable road signs[C]//Proceedings of the 5th IEEE International Conference on Fuzzy Systems,1996:1832-1837.
[6]雋志才,姚宏偉,朱泰英,等.高速公路可變限速系統的社會經濟影響評價[J].公路交通科技,2004,21(5):104-108.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
