基于阻抗控制的機器人力控制算法性能分析
2010-04-11 08:06:36王芳,楊振
制造業自動化 2010年9期
關鍵詞:環境
王 芳, 楊 振
WANG Fang, YANG Zhen
(棗莊學院 計算機科學系,棗莊 277160)
基于阻抗控制的機器人力控制算法性能分析
The research on the performance of robot force control based on the impedance control
王 芳, 楊 振
WANG Fang, YANG Zhen
(棗莊學院 計算機科學系,棗莊 277160)
Hogan提出的阻抗控制算法由于必須要求機器人準確的動力學方程,在實際工程背景中很難應用。本文針對其弊端,研究了自適應阻抗控制算法。以平面機械手為控制對象,使用以上兩種控制方法對其加以控制,從而詳細分析比較了兩種算法的性能優劣。最后,針對阻抗控制算法在實際運用中阻抗參數的調整原則一直是比較困難的問題,本文通過仿真實驗總結了調參規律。
阻抗控制;參數調整; 機器人; 阻抗參數
0 引言
力控制在機器人控制中是目前為止一種復雜的控制算法。特別是機器人與接觸環境時,由于要跟蹤期望的軌跡的同時還要保持期望的力,任務的難度可想而知。阻抗控制算法[1]是近年來許多文獻[2~4]中廣為研究的算法。通過設定阻抗函數,由力、速度、位置的誤差來實現該函數。但它必須要求建立機械手精確的動力學模型,然而這一點在實際工程中是很難做到的。自適應阻抗控制算法[5]的主要思想是在跟蹤環境位置時,通過自適應增益來減小力誤差,該算法不需要獲得環境剛度的知識,所以無論對機器人動力學模型,還是對未知的環境位置或剛度該算法都有一定魯棒性。
1 自適應阻抗控制算法[5]
自適應阻抗控制算法的結構圖如圖1所示。
根據機械手阻抗函數關系式為:

其中當Xr=Xe時E=Xe-X,Xe是環境位置。為討論的減化起見,我們假設僅在一個方向上受力。令fd,fe,m,b,k是矩陣Fd,Fe,M,B,K的對應元素,所以(1)式可寫為:


圖1 自適應阻抗控制算法的結構圖
考慮到機器人實際的工作情況,我們只能得到環境位置的估計X'e,它是不精確的。令δXe=X'e-Xe,以此來表示與精確環境信息Xe的誤差,當設計控制器時,可以用確定的值來代替。設e'=e+δXe,則:

對機器人在自由空間的運動(3),文[5]的分析表明:當δXe<0時,機器人末端不能保證一直與環境接觸;當δXe>0時,可以保證持續的接觸。因此為了保證末端與環境能一直接觸上,對X'e的估計應略大一些以始終獲得δXe>0來保證機器人能與環境接觸上。對接觸空間(4),設計以下的自適應阻抗方程來保證力誤差的穩定性:



2 仿真研究
本文采用平面2R機械手的動力學模型可得到該機械手的慣性矩陣為:

且其質量為:同m1=m2=1KG,連桿長度為:I1=I2=1m。將這些參數帶入到慣性矩陣中得:


2.1 控制算法對不連續變化環境剛度的適應性比較

圖2 力響應曲線


表1 性能指標
可以看出:
1)自適應算法具有較強的穩定性,對不同的剛度在經過一段時間的適應后都能穩定到給定的力上。阻抗算法對不同的剛度雖然經過一段時間的調節后也可以控制接觸力穩定下來,但穩定到達的值卻不同。
2)在各個剛度值上自適應算法的力峰值均較阻抗算法時小。
3)阻抗算法的調節時間在前兩個剛度值上較自適應算法短;而在剛度為50000時,自適應算法在調節時間上更優越,這是因為這時自適應算法的阻尼參數600可使得系統更接近臨界阻尼狀態的緣故。
2.2 控制算法對連續變化環境剛度的適應性比較
下面考察當環境剛度為連續變化的值時,各算法對力控制的情況。取環境剛度Ke為:

圖3 力響應曲線

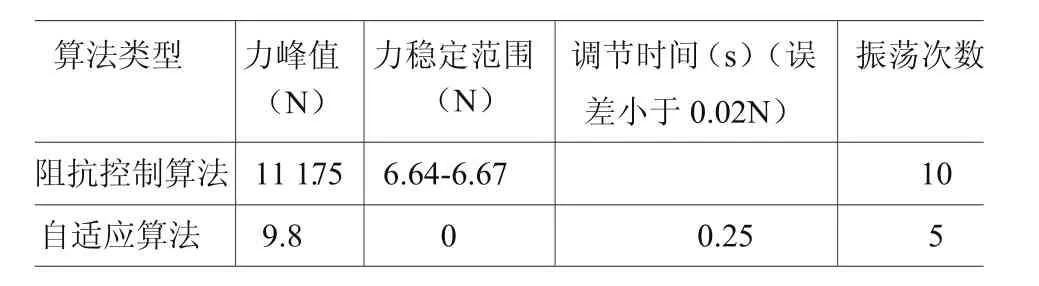
表2 性能指標
由圖表可以看出:傳統的阻抗算法無論在力峰值上還是在調節時間上的性能指標均不如自適應算法,自適應算法的振蕩次數要遠小于阻抗算法,說明其達到穩態值的過程相對平滑,對機器手末端及環境的損傷相對較小。
2.3 控制算法在力與位置垂直正交情況下同時跟蹤控制的性能比較

表3列出了兩個算法各自的性能指標。
由圖4可以明顯地看出自適應算法對給定的力10N的跟蹤較好,能迅速的穩定在10N左右。而阻抗算法達到穩態后,力的振蕩范圍較大,很難控制在一個較小的范圍內。總之,在該例條件較為復雜惡劣的情況下,即:在x方向上環境剛度連續變化的條件下,在該方向上力控制,同時y方向上跟蹤不斷變化的位置,自適應算法表現出了較強的穩定性,比阻抗算法的性能要好的多。
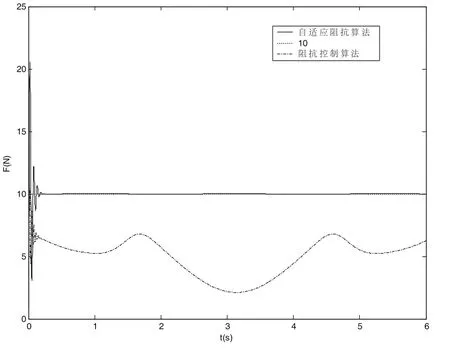
圖4 力響應曲線

表3 性能指標
3 阻抗參數調整規律
合理的調節阻抗參數會使機械手帶有一定的柔性,從而達到減小機械手對環境沖擊的目的,也盡量保護了機械手和環境。通過以上仿真實驗,得到以下阻抗參數的調整原則:

3)對于阻抗參數B來說,由于它是阻尼參數,它的增大或減小一般不會使接觸力的穩定值變化,只會使機械手與環境接觸時的過程發生變化。一般來說,增大阻尼參數B,會使力響應的超調減小,力峰值顯著下降;但過大的阻尼參數會使力響應達到穩定的時間變慢。
4)阻抗參數K是反映機械手剛度變化的量,它的調整直接反映了機械手在與環境接觸時是呈現剛的特性還是呈現柔的特性。一般來說,減小剛度參數K會使機械手與環境的接觸力變小,增大剛度參數會使機械手與環境的接觸力變大。但剛度參數的調整要盡量的使系統處于臨界阻尼或過阻尼狀態,這樣才能既保證機械手與環境接觸力的穩定值較小,又保證接觸瞬間的力峰值較小。
[1] Hongan N.Impedance Control An Approach To Manipulation:'Part I-theory,Part II-implementation,Part III-Applcation[J].J Dyn Sys Meas Cont,1985:1-24.
[2] Seul Jung,T.C.Hsia a,R.G.Bonitz.Force Tracking Impedance Control for Robot Manipulators with an Unknown Enviro nment:Theory,Simulation,and Experiment[J].International Journal of Robotic Research.2001,20(9):765-774.
[3] 羅翔,顏景平.冗余度機器人的非接觸阻抗控制[J].制造業自動化,2003,25(9):19-22.
[4] Yang Zhen,Li Mu-hai.A Method on Impedance Control of Robots Based on the Neural Network. The proceedings of 2008 4th international conference of intelligence information hiding and signal processing.2008.8:1433-1436.
[5] Seul Jung,T.C.Hsia,R.G.Bonitz.Force Tracking Impedance Control of Robot Manipulators Under Unknown Environment[J].IEEE Transaction on Control Systems Technology.2004,12(3):474-483.
TP242.2
A
1009-0134(2010)09-0140-04
10.3969/j.issn.1009-0134.2010.09.43
2010-06-05
山東省教育廳高等學校科研項目(J09LG57);山東棗莊學院科研項目
王芳(1973 -),女,山東濟寧人,講師,碩士,研究方向為智能控制、算法分析。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
