電動助力轉向系統雙閉環模糊PID控制系統分析
2010-04-11 08:07:48魏萬迎殷國富田大慶
制造業自動化 2010年14期
魏萬迎,殷國富,田大慶
WEI Wan-ying1,2, YIN Guo-fu1, TIAN Da-qing1
(1. 四川大學 制造學院,成都 610065;2. 成都大學 電子信息學院,成都 610106)
電動助力轉向系統雙閉環模糊PID控制系統分析
Analysis on eps machitrical fuzzy dual closed-loop control system
魏萬迎1,2,殷國富1,田大慶1
WEI Wan-ying1,2, YIN Guo-fu1, TIAN Da-qing1
(1. 四川大學 制造學院,成都 610065;2. 成都大學 電子信息學院,成都 610106)
電動助力轉向系統(EPS)是機電結合的控制系統,電流PID控制是以目標電流和反饋電流為差值的閉環控制系統,模糊控制是以機械轉向軸取差值的機電閉環控制系統,本文以力矩反饋環為外環,電流反饋環為內環,設計了一個雙閉環控制系統。將模糊PD控制的輸出作為助力目標值,然后進行電流PID控制,快速跟蹤目標力矩。 經仿真模擬, 雙閉環模糊PID控制使電動助力轉向系統具有更好的跟蹤性和穩定性。
助力轉向;電流PID控制;模糊控制;模糊PID控制;機電雙閉環
0 引言
電動助力轉向系統(EPS)是目前車輛轉向系統的研究熱點。轉向系統的作用是可靠、穩定的調節車輪方向,但從實質上講,這是由駕駛員來完成的,助力轉向系統的主要功能是使駕駛員操作更方便舒適、使轉向更加穩定可靠。
電動助力轉向系統(EPS)在助力時是一個力跟隨隨動系統,由扭矩傳感器測得轉向柱扭矩,經控制器以一定算法處理后產生控制信號,經H橋驅動電路輸出電壓U到電機電樞上,驅動電機產生助力轉矩。目前控制器實際使用的控制算法以電流PID(PD) 控制和模糊控制較為普遍,前一種是電機電樞電流反饋形成電流差值PID控制,后一種是通過轉向柱角度的機械反饋形成角度差值(反映為扭矩)控制,后者通常采用模糊控制,或模糊自適應PID控制。為提高控制性能,本文在不增加硬件的條件下,將兩者結合,形成模糊PID機電雙閉環控制策略來提升控制效果。經仿真,模糊PID雙閉環控制系統電動助力轉向系統(EPS)的跟隨能力得到增強。
1 EPS建模系統
把汽車前輪和轉向機構向轉向軸簡化,得到簡化后的轉向系統模型如圖1 所示。汽車電動助力轉向系統主要部件包括:扭矩傳感器、車速傳感器、電流傳感器、電子控制單元(Elec- tric Control Unit ,簡稱ECU) 、直流電動機和帶離合器的減速機構。扭矩傳感器檢測到的扭矩信號、車速傳感器檢測到的車速信號和電流傳感器檢測的電機電樞電流信號送入ECU,根據車速信號和扭矩信號決定電動機的目標電流的大小;反饋的電機電樞電流經PID電流控制跟蹤目標電流,決定電機助力矩, 以保證汽車在低速行駛時輕便靈活, 高速行駛時穩定可靠。
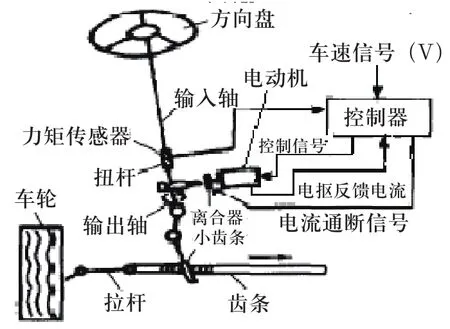
圖1 轉向系統模型示意圖
2 轉向柱受力形成扭矩Ts
研究的電動助力轉向系統是轉向柱助力式轉向系統, 駕駛員手力Tsw通過轉向盤施加到轉向柱的上部;電機助力Tm經減速裝置
加到轉向柱的下部,旋轉方向與Tsw
相同;路面阻力TR 由傳動結構作用于轉向
柱的下部,旋轉方向與Tsw相反;轉向柱上的扭矩傳感器反映了轉向柱的形變,轉向柱上、下部的作用力矩差值決定轉向柱的形變角Δ,扭矩Ts由角度Δ決定。
當Tsw增大,Δ增大,Ts增大;
當Tm增大,Δ減小,Ts減小;
當TR增大,Δ增大,Ts增大;
即:在轉向柱上,
Ts = Tsw + TR-Tm = Tsw-(Tm-TR)
或:Tsw = Ts + (Tm-TR)
3 控制策略分析
通常采用的控制策略有兩種方法,一種是機電閉環反饋模糊控制,由機械部件轉向軸反映出上下部力矩差值,由Ts表示,在ECU中,作PD運算后,輸出電機控制電壓:
Ud = KpTs + Kd dTs/dt
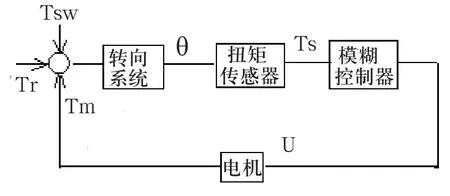
圖2 模糊控制示意圖
模糊控制器我們采用常見的二維結構,以誤差和誤差的變化率為輸入,以控制量的目標值為輸出。模糊控制器為Mamdani型,去模糊化采用重心法。定義E、Ec、U模糊量的模糊子集均為{NB,NM, NS,ZO, PS, PM, PB },分別表示負大、負中、負小、零、正小、正中和正大,E和Ec的論域均為[- 6, 6], U的論域為[0, 12]。
另一種是電流閉環PID反饋控制,根據車速信號和扭矩信號根據經驗和實驗數據得到助力特性曲線,由此決定電動機的目標電流I的大小,再從電流傳感器檢測出電機電樞電流Im,在ECU中,算出電流差值,經PID運算,輸出電機電壓控制信號:
Ud = Kp(Ia-Im) + Kd d(Ia-Im)/dt
電流閉環PID反饋控制能夠加快對目標轉矩的跟隨能力。
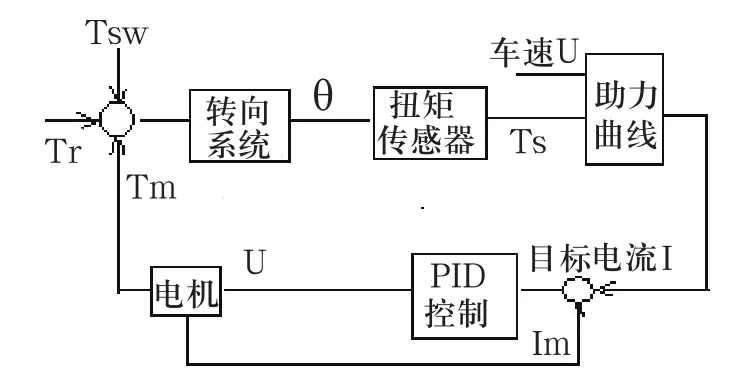
圖3 電流PID控制示意圖
將機電反饋模糊閉環控制作為外環,電流PID反饋控制作為內環,可以組成雙閉環PID反饋控制結構,外環將轉向軸扭矩信號經模糊算法處理確定電動機的目標電流I(決定電機助力力矩),可以解決EPS系統的非線性時變不確定性問題;后者時間常數小,實時性強,能快速縮小電機電樞反饋電流和目標電流的差值,故能提高系統的力跟隨性能。
I = KP1Ts + Kd1 dTs/dt
Ud = Kp(I-Im)+ Kd d(I-Im)/dt
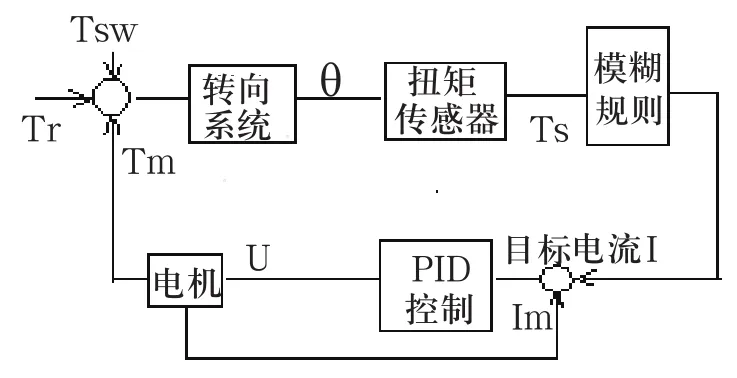
圖4 雙閉環PID控制示意圖
與一般電機的位移、電流雙閉環反饋控制結構不同,助力轉向系統的角位移反饋是由機械部件傳遞,由轉向軸上的扭矩傳感器將其角位移差值反映為扭矩電信號,送到控制器進行處理。
4 仿真結果與分析
采用上述的電流PID控制、模糊PD控制和模糊PID閉環控制三種控制策略,對汽車電動助力轉向系統在Matlab軟件下進行仿真計算分析。仿真計算時, 其相關的參數如下:Ra=0.167Ω,La=0.00015H,Kv=0.057V /rad·s-1,Kt=0.04N·m /A, Jp=0.00018 kg·m,Bp=0.003 399N·m·s/ rad ;
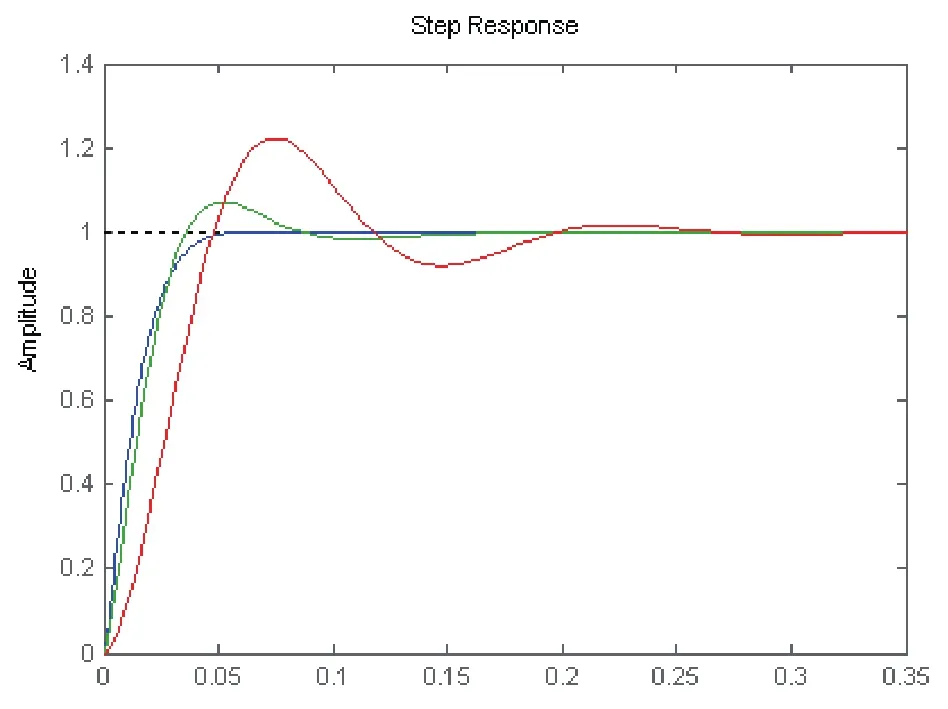
圖5 三種控制策略階躍響應比較
從圖5可見,電流PID控制的調整時間約為0.3s,超調量為20%;模糊控制的調整時間約為0.12s,超調量為7%。機電雙閉環PID控制的調整時間約為0.06s,超調量為接近于0。模糊PD控制優于電流PID控制,模糊PID雙閉環控制又優于模糊控制,反映系統有良好的跟隨性和穩定性。
5 結束語
本文提出了將力矩反饋和電機電樞電流反饋兩者結合的機電雙閉環PID控制策略。仿真計算的結果表明,所提出的機電雙閉環PID控制策略優于常用的兩種控制策略,具有更好控制效果和較好的魯棒性,抗干擾能力也有明顯的提高。
[1] Wei Wanying,Yin Guofu,Tian Daqing. Analysis On EPS Mechatronic Fuzzy-PID Closed-loop Control System [C].International Conference on Electronic Measurement &Instruments.Beijing,China.IEEE.2009,390-393.
[2] 李強,何仁.基于PI電流環電動助力轉向系統的魯棒H∞控制[J].江蘇大學學報:自然科學版,2009,30(2):139-142.
[3] 張鐘光.汽車EPS動力學模型分析及控制系統設計[J].青島大學學報,2003(9):72-76.
[4] 陳無畏,王啟瑞.電動助力轉向系統的模糊自調整PD控制[J].江蘇大學學報(自然科學版),2004(3):112-115.
TP273
A
1009-0134(2010)12(上)-0041-03
10.3969/j.issn.1009-0134.2010.12(上).14
2010-07-20
四川省科技廳重點攻關項目基金資助(03GG0082001)
魏萬迎(1955 -),男,教授,博士,主要從事工業自動化及機電控制的研究工作。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
科學大眾(2021年9期)2021-07-16 07:02:40
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
