基于LabVIEW的電機集群控制系統
2010-04-16 02:38:00李海燕郭前崗周西峰
電氣傳動自動化 2010年6期
關鍵詞:系統
李海燕,郭前崗,周西峰
(南京郵電大學 自動化學院,江蘇 南京 210003)
1 引言
多電機集群控制系統被廣泛應用于紡織業、印染業、石化、冶金、風力發電等領域,多采用現場總線方式實現多電機系統的實時控制,如CAN總線,其控制主板主要有單片機、PLC、DSP等,上位機多為工控組態軟件[1]。本文利用TMS320F2812型數字信號處理器控制無刷直流電機并采集數據,采用RS-232以總線方式實現上位機LabVIEW與集內各主控板的串行通信,LabVIEW把接收到的數據,用形象的圖表實時顯示。對LabVIEW控制系統的要求主要是:①可以通過控制總線對集內控制主板進行積分參數、比例參數的調節;②可以查詢每臺電機的實時參數。
LabVIEW對串口的讀寫提供了很多專用的函數和接口類型,可以方便地實現上位機與DSP的數據通信,這不僅充分發揮了LabVIEW的圖形界面語言的優越性,而且僅需要簡單的低成本設備就可以形象生動地監控電機的運轉狀況[2]。除此之外,LabVIEW可以對數據進行特定的分析處理,如FFT變換、濾除干擾、諧波分析等。RS-232C是目前最常用的串行通信總線接口,本文利用RS-232C串行通信接口,首先,LabVIEW與DSP握手,保證了LabVIEW與DSP的同步,防止數據的丟失。同時,LabVIEW可以調節DSP的參數,握手之后傳送數據、調節電機的參數,實現LabVIEW對集群電機的實時監控。
2 系統組成
2.1 系統整體拓撲結構
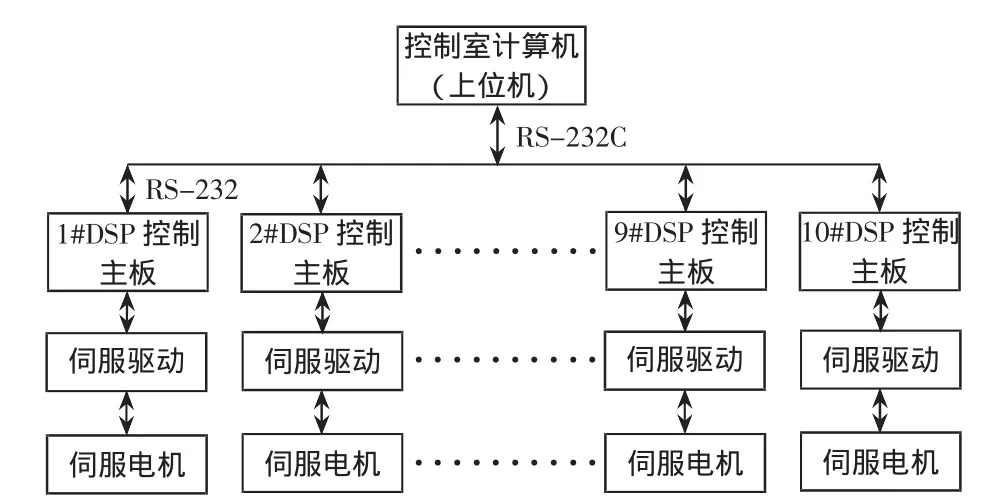
圖1 系統整體拓撲結構
系統拓撲結構如圖1所示。其中控制室計算機(上位機)由LabVIEW實現;DSP控制主板為TMS320F2812型數字信號處理器,10臺DSP控制主板,組成集群式的網絡,采用RS-232串口以總線方式,實現上位機與集內各控制主板的串行通信。
2.2 具體集內系統組成
具體的集內系統組成主要包括以下5個部分。
①無刷直流電機試驗平臺;
②TMS320F2812(DSP)軟件開發平臺;此平臺是通用運動控制系統綜合實驗與研究開發平臺,可以驅動無刷直流電機、永磁同步電機和感應電機。
③電平轉換芯片MAX232;將TTL或CMOS邏輯電平轉換為RS-232C的標準電平,實現LabVIEW 與 DSP 的串口通信[3]。
④RS-232總線;很容易實現上位機LabVIEW與DSP軟件開發平臺的通信。
⑤LabVIEW軟件平臺。充分發揮了LabVIEW的圖形界面語言的優越性,實現了低成本快速搭建小型電機監控系統。
基于無刷直流電機的集內系統的結構如圖2所示。

圖2 具體集內系統結構
3 集內系統設計
3.1 DSP設計
3.1.1 串行通信硬件部分設計
TMS320F2812的串行通信接口模塊(SCI)是一個標準的通用異步接受/發送器,為異步串行通信方式。其接收器和發送器都為雙緩沖模式,支持16級接收和發送FIFO,發送和接收具有自己獨立的使能和中斷位,可以工作在半雙工或全雙工通信模式[4]。波特率可以通過編寫兩個8位的波特率選擇器SCIHBAUD和SCILBAUD來改變,SCI模塊的串行時鐘由低速外設時鐘LSPCLK和波特率選擇寄存器BSR的值確定。其波特率計算公式如下:
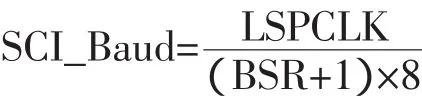
要實現同步問題,必須保證時鐘一致性,選擇LSPCLK為37.5MHz,BSR為00F3H,故標稱波特率為19200b/s。
串口通信使用計算機內部的串口,只要一根串口線就可以達到發送或接受的目的,而且不失測試的準確性。采用了RS-232串行總線實現DSP與LabVIEW的通信。其中RS-232C是目前最常用的串行通信總線接口,其全稱是“使用二進制進行交換的數據終端設備和數據通信設備之間的接口”。在電氣特性上,RS-232C采用負邏輯電平,-3~-15V為邏輯“1”,+3~+15為邏輯“0”。通常采用-10左右為邏輯1,+10左右為邏輯0。由于TMS320F2812輸入輸出信號為TTL電平,邏輯1為3.3V左右,邏輯0為0.4V左右,因此采用RS-232C專門的電平轉換芯片MAX232實現電平的轉換[5]。其RS-232C接口電路如圖3所示。
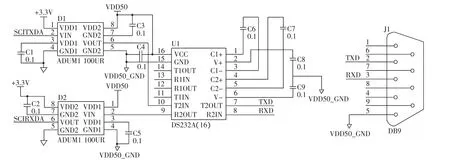
圖3 RS-232C接口電路
3.1.2 串行通信軟件部分的實現
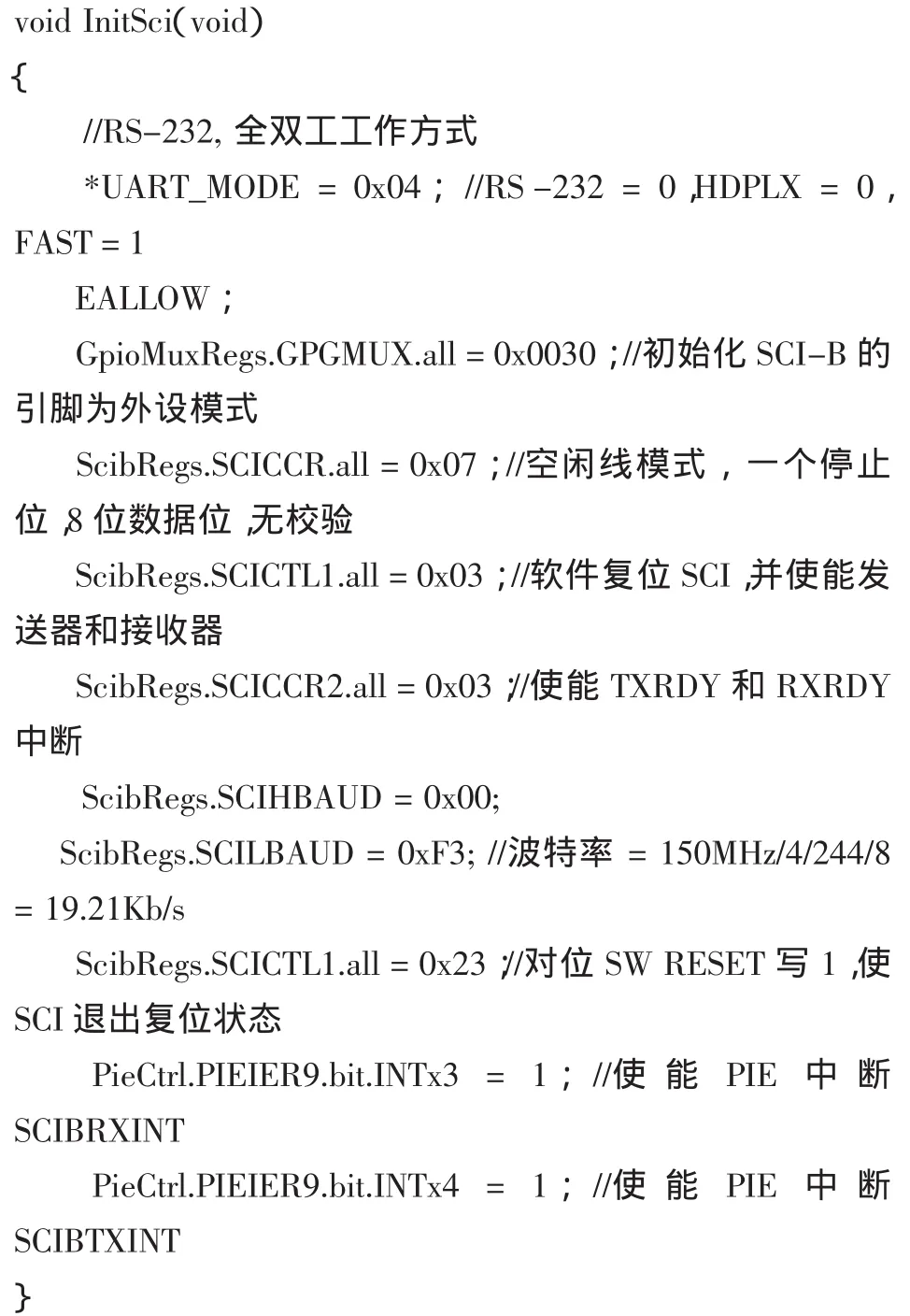
在通信的開始應先對其中一些寄存器進行初始化,初始化主要包括:硬件接口的初始化、波特率的設定、接受啟動等。串口初始化程序如下:

3.2 LabVIEW程序設計
3.2.1 VISA介紹
LabVIEW提供了功能強大的VISA庫。VISA(Virtual Instrument Software Architecture)—虛擬儀器軟件架構,已成為實現儀器控制的通用標準應用程序接口(API),建立了與儀器接口總線無關的標準I/O軟件規范,實質上VISA是一組標準的I/O函數庫及其相關規范的總稱。它駐留于計算機系統之中執行儀器總線的特殊功能,扮演了計算機與儀器之間的中間層連接角色,為計算機和儀器的順利通信提供了通道。
VISA是所有現存I/O接口軟件的功能超集,與現存的I/O接口軟件相比,它具有如下4個特點:①其I/O控制功能適用于多種儀器類型(如GPIB、VXI、串口等多種儀器接口控制操作);②適用于各種硬件接口類型;③適用于單、多處理器結構或分布式網絡結構;④用于多種網絡機制,無論是由虛擬儀器系統網絡構成的VXI多機箱擴展網絡,還是以太網,儀器操作是一致的[6]。
3.2.2 VISA串口通訊函數
LabVIEW的串口通訊VI位于Instrument I/O Platte的Serial中,其調用路徑為:函數>>儀器I/O>>串口,主要的串口通訊VI如表1所示。
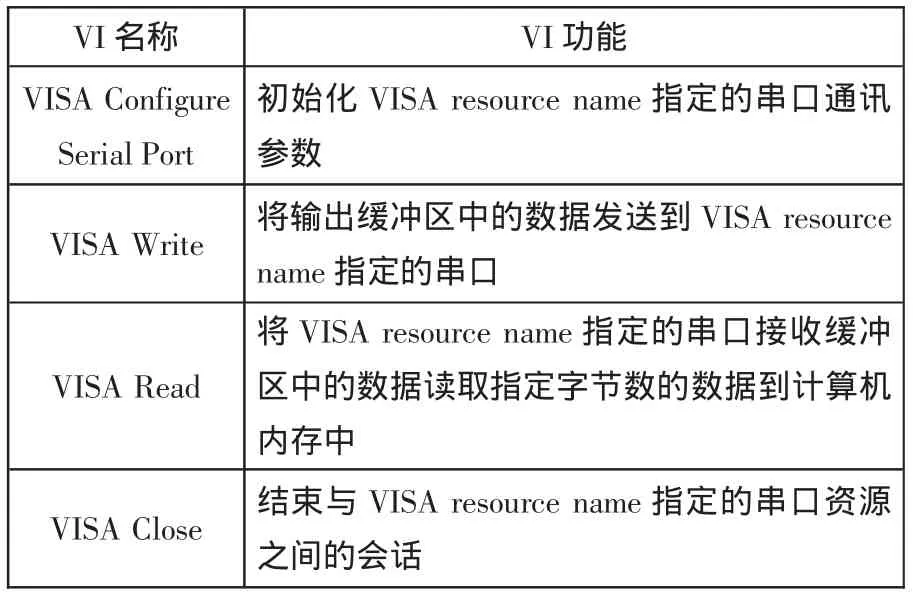
表1 主要的串口通訊VI
3.2.3 軟件流程
LabVIEW軟件設計主要包括串口初始化、握手、讀寫數據、數據處理和分析等幾部分。通過調用VISA函數中的一組I/O庫函數實現串口的配置和通信,其流程圖如圖4所示。
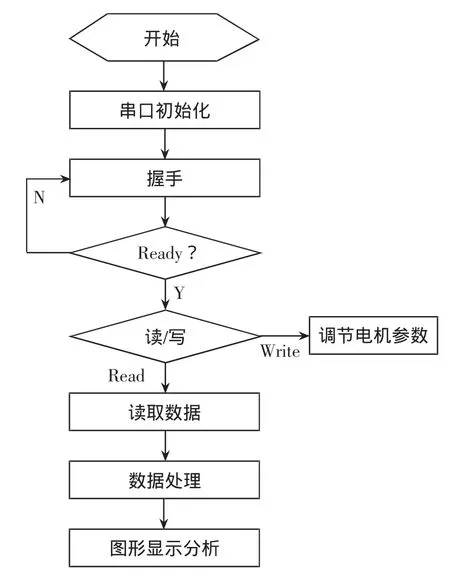
圖4 LabVIEW軟件設計流程圖
4 實驗結果
通過組成此實驗系統,實現了LabVIEW與集內各控制主板的串行通信,此控制界面可以方便地選擇串口、波特率,控制電機運動時的參數,圖形化的實時監控電壓、電流、轉速的變化,以及電壓、電流、轉速運行對比,方便實驗者觀察電機運轉狀況。本文給出了LabVIEW與1#DSP控制主板通信時電機轉速的圖形變化情況,其中電機運動時轉速波形如圖5所示。
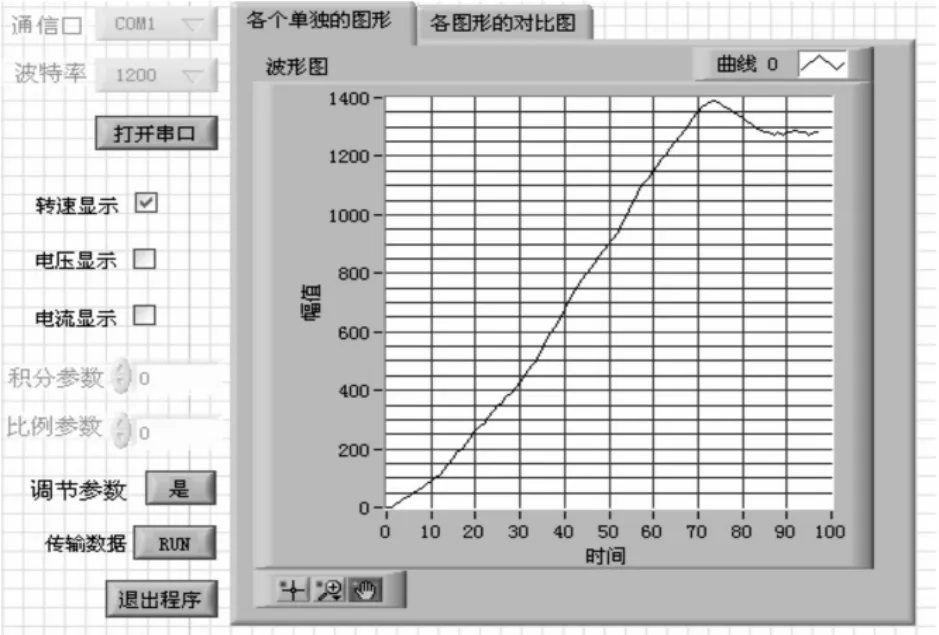
圖5 顯示轉速時的控制界面圖
5 結論
這一電機集群控制系統被應用于無刷直流電機實驗系統中,并取得了較理想的結果。通過RS-232總線實現了LabVIEW與集內控制主板DSP的串行通信。實踐證明,該平臺具有以下特點:操作簡單,界面友好,使用者可以直觀地觀察電機轉動的參數;功能豐富,可以讀寫串口數據,調節電機參數;可移植性強,可以應用于無刷直流電機集群控制系統中,簡單地改變一些參數就可以應用到異步電機控制系統及單片機控制的步進電機控制系統中等;使用起來靈活,編譯生成exe文件,可以方便地安裝在沒有安裝LabVIEW的機器上。
但由于受RS-232C串行通信的限制,只能用于短距離的數據發送與接收,在今后改進方面上,可對此試驗平臺做進一步的擴展,如硬件系統性能的提高,成本的進一步降低,其它總線接口的擴展,用戶控制界面的改進,無線網絡化的控制等,使此試驗平臺不斷完善。
[1]王 麗,黨懷東,趙 斌.基于NI_LabVIEW的超導磁鐵電源接地電流監控系統[J].電氣傳動自動化,2007,29(1):49-51.
[2]王 葵,董 罡,邢在奎.基于LabVIEW虛擬儀器的數據采集和故障錄波[J].電子測量與儀器學報,2004,18(4):83-88.
[3]N Kehtarnavaz,C,Gope.DSP System design using Lab-VIEW and simulink:A comparative evaluation [J].IEEE,ICASSP2006,985-988.
[4]韓豐田.TMS320F2812x DSP原理及應用技術[M].北京:清華大學出版社,2009.
[5]戴 鵬,劉 劍,符曉等.基于TMS320F2812與LabVIEW的串口通信[J].計算機工程,2009,35(4):94-96.
[6]張 凱,周 陬,郭 棟.LabVIEW虛擬儀器工程設計與開發[M].北京:國防工業出版社,2004:244-253.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32