基于模糊自適應(yīng)整定PI感應(yīng)電動(dòng)機(jī)直接轉(zhuǎn)矩控制的研究
2010-04-16 02:37:58湯仁彪
電氣傳動(dòng)自動(dòng)化 2010年5期
關(guān)鍵詞:系統(tǒng)
湯仁彪
(江陰職業(yè)技術(shù)學(xué)院電子系,江蘇 江陰 214405)
1 引言
一般直接轉(zhuǎn)矩控制系統(tǒng)中的速度調(diào)節(jié)器采用傳統(tǒng)的PI控制器,在確定PI參數(shù)的過(guò)程中,由于PI參數(shù)的整定值具有一定局域性的優(yōu)化值,而不是全局性的最優(yōu)值,因此,PI控制無(wú)法從根本上解決動(dòng)態(tài)品質(zhì)和穩(wěn)態(tài)精度的矛盾[1]。特別是對(duì)于高精度、高動(dòng)態(tài)性能的調(diào)速,傳統(tǒng)的PI控制不能滿足其要求。相比之下,模糊參數(shù)自適應(yīng)控制器利用模糊推理,實(shí)時(shí)調(diào)整PI參數(shù),可以使PI控制適應(yīng)異步電動(dòng)機(jī)運(yùn)行過(guò)程的變化,獲得了良好的控制性能[9、10]。本文在MATLAB中用M文件建立了一種模糊推理系統(tǒng),利用SIMULINK/PLECS對(duì)異步電動(dòng)機(jī)的直接轉(zhuǎn)矩控制進(jìn)行了模糊自適應(yīng)PI控制的仿真研究,并且對(duì)傳統(tǒng)PI速度調(diào)節(jié)器進(jìn)行比較,驗(yàn)證了該模糊算法的有效性。
2 異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制基本原理
2.1 異步電動(dòng)機(jī)數(shù)學(xué)模型
在理想假設(shè)條件下,異步電動(dòng)機(jī)在α,β坐標(biāo)下各方程如下[2]。
磁鏈方程:

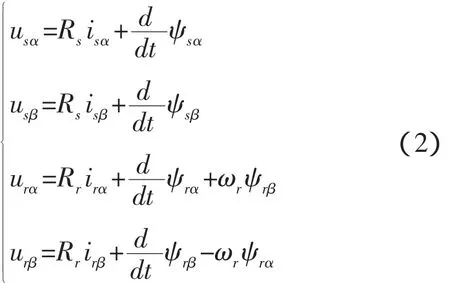
電壓方程為:
轉(zhuǎn)矩方程:
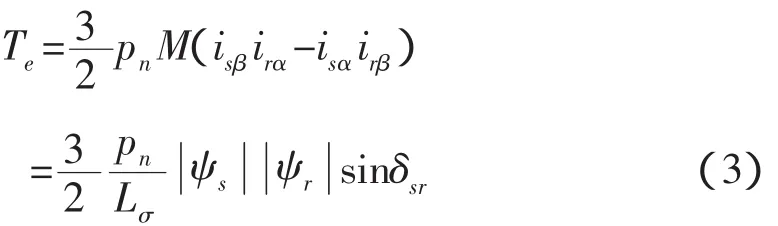
式中:Lσ=(LsLr-M2)/M2;δsr為定子與轉(zhuǎn)子磁鏈的角度差。pn為電動(dòng)機(jī)的極對(duì)數(shù)。由式(3)可知,只要能快速改變定子磁鏈?zhǔn)噶啃D(zhuǎn)速度,就可以獲得快速的電磁轉(zhuǎn)矩動(dòng)態(tài)響應(yīng)。
2.2 異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制系統(tǒng)框圖
異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制系統(tǒng)框圖如圖1所示[3]。它包括速度調(diào)節(jié)器、轉(zhuǎn)矩控制、磁鏈控制等。該系統(tǒng)采用定子磁場(chǎng)定向,在α,β坐標(biāo)系下計(jì)算和控制異步電動(dòng)機(jī)的轉(zhuǎn)矩,將實(shí)際轉(zhuǎn)矩、磁鏈分別與給定值進(jìn)行比較,定子磁鏈與電磁轉(zhuǎn)矩控制的兩個(gè)狀態(tài)切換分別由兩個(gè)滯環(huán)比較器實(shí)現(xiàn),形成轉(zhuǎn)矩、磁鏈的閉環(huán)控制。

圖1 直接轉(zhuǎn)矩控制系統(tǒng)框圖
3 模糊自適應(yīng)PI控制器的設(shè)計(jì)
3.1 自適應(yīng)模糊PI控制器結(jié)構(gòu)
模糊自適應(yīng)PID控制系統(tǒng)主要由參數(shù)可調(diào)整PID和模糊推理系統(tǒng)兩部分組成[5],以誤差e和誤差變化率ec作為模糊控制器的輸入,根據(jù)PI參數(shù)Kp和Ki與E和EC之間的模糊關(guān)系,在運(yùn)行中不斷地檢測(cè)e和ec,根據(jù)模糊控制原理把ΔKp、ΔKi作為輸出量,從而對(duì)這2個(gè)參數(shù)進(jìn)行在線修改,以滿足不同的E和EC對(duì)PI控制參數(shù)的不同要求,從而使系統(tǒng)具有良好的動(dòng)、靜態(tài)性能和抗干擾能力,其結(jié)構(gòu)如圖2所示。

圖2 自適應(yīng)模糊控制器結(jié)構(gòu)
3.2 模糊控制器的規(guī)則庫(kù)
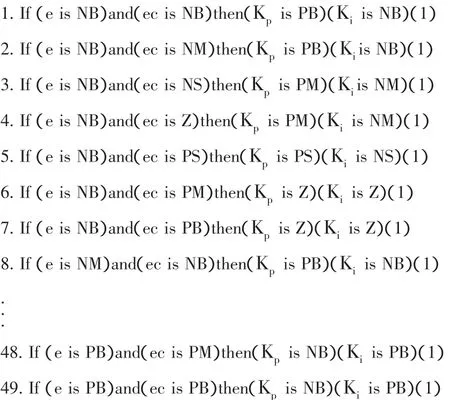
Fuzzy Logic Control的設(shè)計(jì)是將速度誤差e、誤差變化率ec,相應(yīng)的模糊變量E、Ec的論域量變化在[-3,3],共為7個(gè)等級(jí),取如下7個(gè)語(yǔ)言變量{PB(正大),PM(正中),PS(正小),Z(零),NS(負(fù)小),NM(負(fù)中),NB(負(fù)大)}[6]。 模糊控制設(shè)計(jì)的核心是總結(jié)工程設(shè)計(jì)人員的技術(shù)知識(shí)和實(shí)際操作經(jīng)驗(yàn),建立合適的模糊規(guī)則表,然后在Matlab中建立M文件,用模糊邏輯工具箱中的命令得到模糊推理系統(tǒng)[7]。此處共有49條模糊規(guī)則如下:
4 仿真結(jié)果與分析
4.1 仿真模型的建立

圖3 異步電動(dòng)機(jī)的模糊自適應(yīng)控制系統(tǒng)模型

圖4 模糊自適應(yīng)PI控制模型
利用SIMULINK與PLECS搭建了異步電動(dòng)機(jī)的模糊自適應(yīng)控制系統(tǒng),如圖3所示,其中模糊邏輯推理系統(tǒng)采用前面已建立的系統(tǒng)[8]。速度控制模塊根據(jù)模糊推理系統(tǒng)的輸出實(shí)時(shí)調(diào)整PI控制的參數(shù),系統(tǒng)結(jié)構(gòu)如圖4所示。
4.2 仿真結(jié)果
異步電動(dòng)機(jī)的參數(shù)220 V,Nn=1748.3 1/min,In=49.68 A,Pn=14.72 kW,其它采用PLECS中默認(rèn)的參數(shù)仿真時(shí)間設(shè)置為6s。電機(jī)轉(zhuǎn)矩負(fù)載為40N·m,在給定轉(zhuǎn)速180rad/s下起動(dòng),3s時(shí)給定轉(zhuǎn)速端突加負(fù)載20rad/s的擾動(dòng),擾動(dòng)時(shí)間為0.2s。異步電動(dòng)機(jī)在常規(guī)PI控制與模糊自適應(yīng)PI控制下的電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩曲線如圖5、6所示。
從仿真曲線上分析,常規(guī)PI控制器在受到擾動(dòng)后,轉(zhuǎn)速產(chǎn)生了明顯的變化,而模糊自適應(yīng)PI控制器由于能實(shí)時(shí)在線修改參數(shù)Kp和Ki,轉(zhuǎn)速基本保持穩(wěn)定。
5 結(jié)束語(yǔ)
本文設(shè)計(jì)了一種模糊自適應(yīng)PI控制器,通過(guò)模糊自適應(yīng)PI控制器來(lái)自動(dòng)調(diào)整Kp、Ki兩個(gè)參數(shù),使控制器具有更好的性能。仿真結(jié)果表明,模糊自適應(yīng)PI控制器與常規(guī)PI控制相比,由于采用了模糊規(guī)則推理實(shí)時(shí)修改PI整定參數(shù),使得系統(tǒng)各項(xiàng)性能指標(biāo)明顯優(yōu)于普通PI控制器,從而取得了滿意的系統(tǒng)動(dòng)、穩(wěn)態(tài)性能。
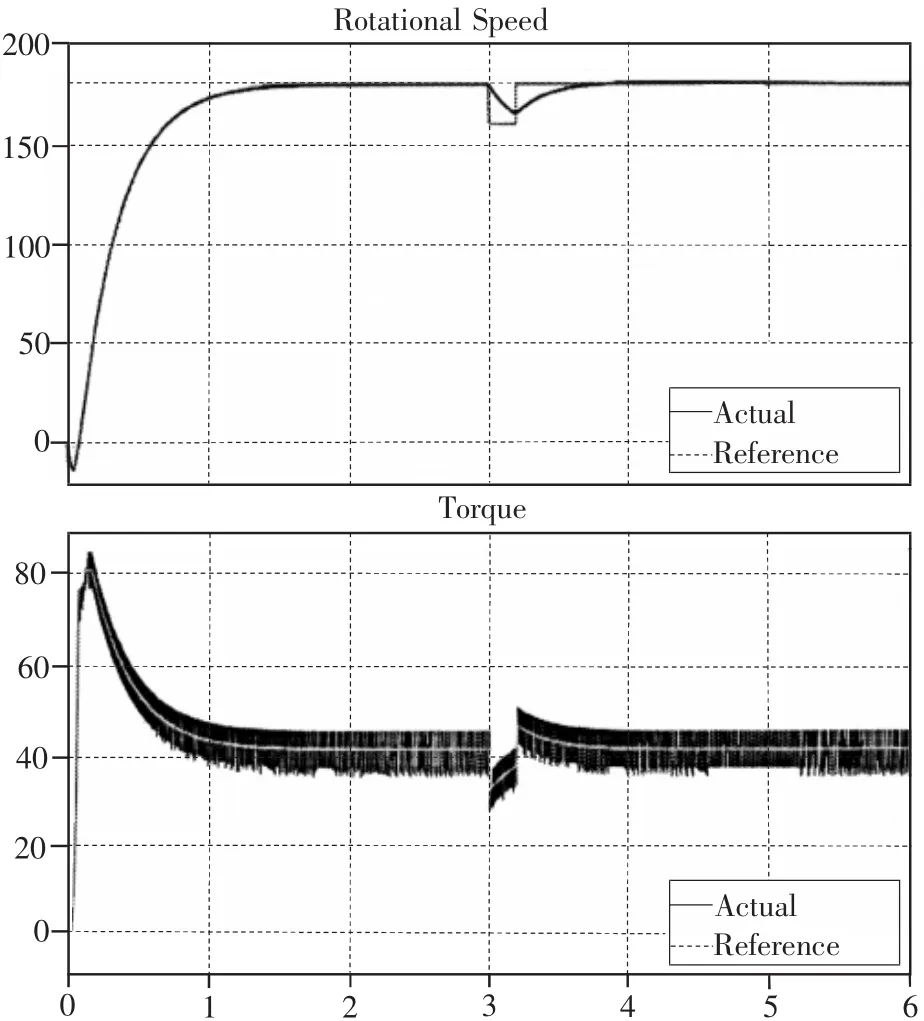
圖5 常規(guī)PI控制電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩曲線

圖6 模糊自適應(yīng)PI控制電機(jī)轉(zhuǎn)速、轉(zhuǎn)矩曲線
[1]紀(jì)志成,薛 花,沈艷霞.異步電機(jī)調(diào)速系統(tǒng)的新型模糊控制算法[J].電機(jī)與控制學(xué)報(bào),2004,31(4):28-32.
[2]周揚(yáng)忠,胡育文.交流電動(dòng)機(jī)直接轉(zhuǎn)矩控制[M].北京:機(jī)械工業(yè)出版社,2009,10.
[3]李 夙.異步電動(dòng)機(jī)直接轉(zhuǎn)矩控制[M].北京:機(jī)械工業(yè)出版社,2001.
[4]魏 欣,陳大躍.基于模糊空間矢量調(diào)制的直接轉(zhuǎn)矩控制方案[J].系統(tǒng)仿真學(xué)報(bào),2007,19(3):1281-1283.
[5]汪利峰,王耀南,陳正龍.基于預(yù)測(cè)模糊PI的異步電機(jī)控制[J].電氣傳動(dòng),2009,39(2):52-55.
[6]李友善,李 軍.模糊控制理論及其在過(guò)程控制中的應(yīng)用[M].北京:國(guó)防工業(yè)出版社,1993.
[7]劉金琨.先進(jìn)PID控制[M].電子工業(yè)出版社,2004.
[8]張國(guó)良,曾 靜,柯熙政,鄧方林.模糊控制及其MATLAB應(yīng)用[M].西安交通大學(xué)出版社,2002.
[9]劉述喜,王明渝.模糊控制在感應(yīng)電動(dòng)機(jī)直接轉(zhuǎn)矩控制中的應(yīng)用[J].重慶大學(xué)學(xué)報(bào),2005,28(12):23-26.
[10]李 輝.利用模糊控制改善直接轉(zhuǎn)矩低速性能的研究[J].電氣傳動(dòng)自動(dòng)化,2006,28(1):32-33.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32