SINS/GPS/LORAN-C多傳感器組合導航系統研究*
2010-04-26 05:08:02黃顯亮溫連峰孫銘明
艦船電子工程 2010年10期
黃顯亮 溫連峰 孫銘明
(92956部隊 大連 116041)
1 引言
導航系統在國防和諸多國民經濟領域廣泛應用;同時導航系統提供的位置、速度和時間等信息,也是完成部隊的調動部署、指揮作戰、綜合保障,以及武器平臺的應用中不可缺少的支柱,導航戰已經成為現代戰爭的重要組成部分,近年來在國際上發生的一些戰爭,無不驗證了導航在現代戰爭中的重要地位。可是現有的單一導航手段難以滿足高可靠(容錯)、高定位精度、高抗干擾、高自主、高隱蔽、全球性和實時性的導航要求。因此,組合導航的研究已經越來越為人們所重視。
現階段的組合導航系統多以慣性導航系統為主系統[1],其它導航系統輔助慣導來提高導航精度和系統的可靠性。卡爾曼濾波器是組合導航信息處理的關鍵性技術,而聯邦卡爾曼濾波器已被美國空軍實驗室選為下一代容錯導航系統的基本濾波方法。
本文根據捷聯慣導(SINS)、GPS、Loran-C的特點,建立了SINS/GPS/Loran-C多傳感器組合系統的濾波模型,并進行了聯邦卡爾曼濾波器的設計。在進行了比較充分的理論分析基礎上,利用實測的靜、動態數據對多傳感器組合導航濾波器進行了驗證實驗,給出了部分系統參數的曲線圖,通過理論分析和實驗證明:本文應用的聯邦卡爾曼濾波器是可行的。
2 組合導航系統聯邦卡爾曼濾波器設計
本文設計的SINS/GPS/Loran-C組合導航系統的聯邦卡爾曼濾波器結構如圖1所示[2~3],采用間接、閉環反饋校正的濾波器設計,各子濾波器是次優濾波,主濾波器是全局最優濾波。聯邦卡爾曼濾波器具有容錯和檢測故障的能力,局部濾波器LF1和LF2有相同的輸出,但是精度不同。局部濾波器LF1(用于SINS與GPS組成的子系統)的精度比局部濾波器LF2(用于SINS與Loran-C組成的子系統)的精度高。LF2的主要目的是用來改善系統的可靠性和容錯能力,盡管它不能使系統的精度有明顯的改善。
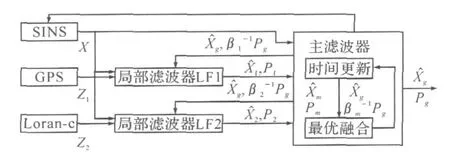
圖1 SINS/GPS/Loran-C組合導航系統中的聯邦卡爾曼濾波器
2.1 組合導航系統狀態方程的建立
1)基本導航系統SINS
本組合導航系統是針對二維導航定位設計,采用北東地的地理坐標系作為導航坐標系,所以不考慮 SINS 的高度信息(δ h),地向速度信息(δ VD)和加速度計地向漂移信息(▽D),因此根據文獻[2]和文獻[5]可得本組合導航系統中SINS的狀態矢量為:
其它各參數的定義詳見參考文獻[2]。
2.2 組合導航系統測量方程的建立
在本組合中,子系統GPS、Loran-C為觀測系統,取SINS系統給出的經度、緯度和GPS系統或Loran-C系統輸出的經度、緯度的差作為觀測量,觀測量依次為:
2.3 組合導航系統的仿真
由于導航系統是時變的,組合系統的系統矩陣和量測矩陣的確定都與載體的位置、速度有關,因此進行仿真前,首先要設計載體的航行軌跡以提供量測值[6],仿真中的航行軌跡盡可能接近實際情況,包括艦艇的典型機動動作,以反映組合系統在各種情況下的性能。航行過程包括:加速、巡航、轉彎等階段,系統仿真時間共3600s,同時為了使各子濾波器的輸出信息同步,設GPS和 Loran-C的信息輸出間隔都是5s。設載體的初始位置為北緯38°,東經 121°,初始航向 180°,初始速度為 0m/s,SINS由低精度元件構成,陀螺時間相關漂移0.1(°)/h,陀螺白噪聲漂移 0.1(°)/h,加速度計零偏10-3g。平臺初始誤差角取北向100″,東向100″,水平速度誤差為1m/s,水平位置誤差為100m,選取北東地的地理坐標系為導航坐標系。具體的理論仿真結果如圖2~4所示。
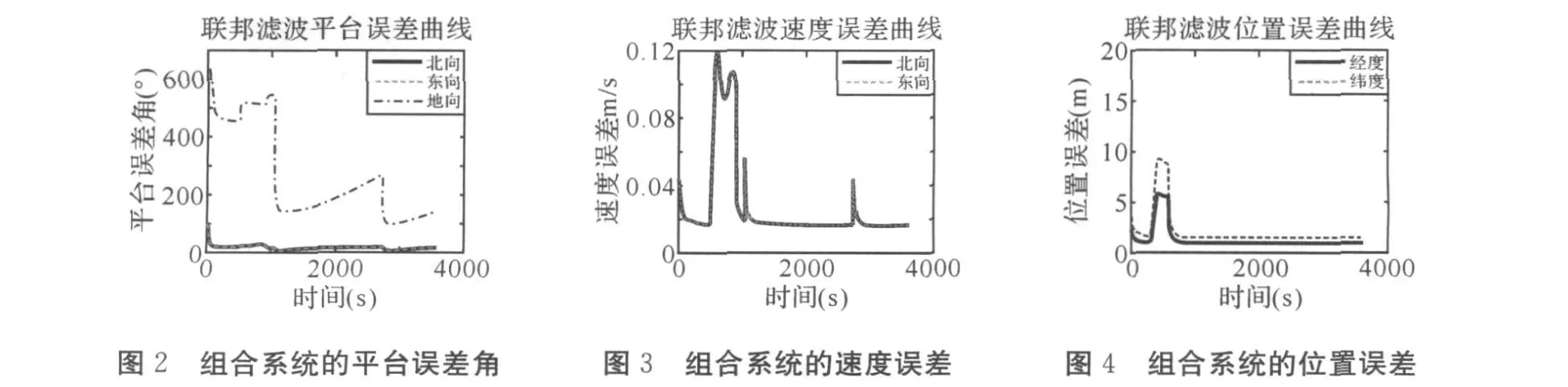
由圖2~4可以看出:組合系統的速度誤差、位置誤差、平臺水平誤差角都迅速收斂并穩定,導航系統的性能得到改善。為了驗證聯邦卡爾曼濾波器的容錯性能,在仿真過程中的600s~800s之間人為設置GPS信號無效,由圖3和圖4可以看出,重構后的SINS/Loran-C組合系統在750s附近開始迅速收斂,誤差逐漸減小,SINS/GPS/Loran-C在800s重新組合后,誤差繼續減小,最后速度誤差穩定在小于0.02m/s,經度誤差穩定在1m左右,緯度誤差穩定在2m以內。從理論仿真結果可以看出:SINS/GPS/Loran-C組合的聯邦卡爾曼濾波器達到了提高導航系統的穩定性和精度的目的,此組合是可行的。
3 實驗與分析
為進一步檢驗以上討論的SINS/GPS/Loran-C組合系統的聯邦卡爾曼濾波器性能,在此采用IMU、GPS、Loran-C的靜、動態實測數據進行了實驗。GPS和 Loran-C的信息輸出間隔設置為5s,GPS采用WGS-84坐標系,Loran-C采用WGS-72坐標系,組合系統選取北東地的地理坐標系為導航坐標系。具體的實驗結果如圖5~圖10所示。
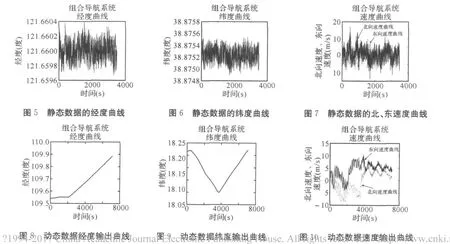
進行靜態數據采集點的位置坐標為北緯38°52.513′(即 38.8752°),東經 121°39.601′(即121.6600°)。采用GPS和Loran-C的位置信息為觀測量,由圖5~圖7可以看出:組合系統的緯度誤差穩定在30m以內,經度誤差穩定在25m以內;北向和東向速度誤差大致在5m/s以內。以上靜態實測數據的實驗可以表明:本文設計的SINS/GPS/Loran-C組合系統的聯邦卡爾曼濾波器是穩定可靠的,達到了提高導航系統精度和可靠性的目的。
在經過靜態實測數據試驗的基礎上,應用此聯邦卡爾曼濾波器對在某海區采集到的動態實測數據(IMU 、GPS、Loran-C)進行試驗,以進一步驗證該濾波器的可行性。SINS/GPS/Loran-C組合系統的聯邦卡爾曼濾波器輸出的載體實時速度和實時位置曲線如圖8~圖10所示。
通過分析圖8和圖10可知:在2500s~7500s的時間段內,經度的變化量接近0.4°,換算成距離為24海里;而從東向速度曲線上看,東向速度的平均值在8m/s~9m/s的量級之間,按照這個速度估算可得,在5000s的時間內,東、西方向的距離變化在21.6海里~24.3海里左右,所以東向速度曲線和載體的經度曲線所反映出的艦船變化是一致的。
同理,通過分析圖9和圖10可知:在3750s~7500s的時間段內,緯度的變化量接近 0.125°,換算成距離為7.5海里;而從北向速度曲線上看,速度的平均值在3m/s~4m/s的量級之間,按照這個速度估算可得,在3750s的時間內南、北方向的距離變化在6.1~8.1海里左右,所以北向速度曲線和載體的緯度曲線所反映出的艦船變化是一致的。
通過以上動態實測數據的試驗結果曲線和對試驗結果的分析表明:組合系統的位置曲線所反映出艦船的位置變化與速度曲線所反映出艦船運動的趨勢是一致的。
4 結語
本文針對SINS/GPS/Loran-C組合系統進行了聯邦卡爾曼濾波器的設計與仿真,并以實測數據為基礎進行了實驗驗證。仿真和實驗驗證所得出的結論是基本一致的:即本文所設計的SINS/GPS/Loran-C組合系統的聯邦卡爾曼濾波器可以很好地提高導航系統的定位精度和可靠性,是可行的。
[1]衣曉,何友.多傳感器組合導航系統評述[J].火力與指揮控制,2003,28(4):1~4
[2]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,2004
[3]Carlson N.A.Federated Kalman filter simulation results[J].Navigation:Journal of the Institute of Navigation,1994,41(3):297~321
[4]黃曉瑞,崔平遠,崔沽濤.多傳感器信息融合技術及其在組合導航系統中的應用[J].高技術通訊,2002,(2):107~110
[5]林雪原.基于位置補償的北斗雙星多組合導航系統模式研究[D].南京:南京航空航天大學博士論文,2004,3
[6]Y.Bar-Shalom,T.E.Fortmann.T racking and data association[M].Academic press,1988
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28