鐵路信號基礎知識第七講 列控系統的基本概念
2010-05-08 09:08:10傅世善
鐵路通信信號工程技術 2010年5期
傅世善
(北京全路通信信號研究設計院,北京 100073)
1 列控系統的定義
現代鐵路信號系統包括:列車運行調度指揮系統、列車運行自動控制系統、車站聯鎖系統3個主要系統。以列車運行自動控制系統為中心。
列車運行自動控制系統(ATC)就是對列車運行全過程或一部分作業實現自動控制的系統。其特征為列車通過獲取的地面信息和命令,控制列車運行,并調整與前行列車之間必須保持的距離。
列車運行自動控制系統(簡稱列控系統)是保證列車按照空間間隔制運行的技術方法,它是靠控制列車運行速度的方式來實現的。
在城市軌道交通領域,列車運行自動控制系統ATC包括3個子系統: 列車超速防護系統(ATP),列車自動駕駛系統(ATO)和列車自動監控系統(ATS)。
2 中國鐵路采用過的列控系統
目前,列控系統有很多級別和種類,中國鐵路采用過的列控系統如下。
廣深線采用滯后階梯式速度監控(TVM300)系統,UM71無絕緣軌道電路能發送18個信息,采用臺階式分級速度控制模式。
秦沈客運專線采用TVM430/SEI系統,是TVM300的升級系統, UM71無絕緣軌道電路進行了數字化改造,發展成為UM2000,低頻信號增加到28種,有效信息量為221個。與滯后階梯式速度監控(TVM300)相比,一個閉塞分區內的控制曲線是連續的,所以稱其為分級速度曲線控制模式。
速度250 km/h的鐵路采用CTCS-2系統,是基于軌道電路加應答器傳輸列車運行信息的點連式系統,采用目標-距離模式監控列車安全運行。
青藏線采用ITCS系統,是基于無線通信(GSM-R)的列控系統,以無線通信(GSM-R)完成車地間雙向、實時和連續的信息傳輸,以GPS差分定位系統實現列車定位,車站設置無線閉塞中心(RBC),用安全型邏輯控制器VHLC實現站內聯鎖。中小站及區間的線路旁除道岔轉轍裝置外,不設置信號機、軌道電路或其他信號設備,采用目標-距離模式監控列車安全運行。
京津城際鐵路的列控系統采用ETCS 1加CTCS-2級方案,ETCS 1是基于應答器進行車地間信息傳輸的列控系統,作為高速列車運行的主要系統,CTCS-2級作為備用系統,CTCS-2級還兼用于250 km/h列車上線, 采用目標-距離模式監控列車安全運行。
速度350 km/h客運專線采用CTCS-3系統,采用無線通信方式,實現了地-車雙向信息傳輸,構成了更完善的連續速度控制模式,實現了準移動閉塞,CTCS-3系統包含了CTCS-2系統,用于備用和速度250 km/h列車上線的兼用。
城軌交通方面更是五花八門,可謂集世界之大成,世界各大信號公司的列控系統中國都有。
3 列控系統的兩大基本要素
列控系統有很多級別和種類,可根據列車運行控制模式和車-地信息傳輸方式兩大基本要素來進行識別,而兩者之間又是相互關聯的。
3.1 列控系統的控制模式
列控系統的控制模式是其主要特征和性能之一,控制模式決定了閉塞方式和列車運行間隔,從而決定了運輸能力,控制模式也提出了對車-地信息傳輸方式的基本需求。
(1)分級速度控制
分級速度控制以一個閉塞分區為單位,根據列車運行的速度分級,對列車運行進行速度控制。分級速度控制系統的列車追蹤間隔與閉塞分區的劃分、列車性能和速度有關,而閉塞分區的長度是以最壞性能的列車為依據并結合線路參數來確定的,所以,不同速度列車混合運行的線路采用這種模式能力要受到較大影響。
分級速度控制可分為階梯式和分段曲線式。階梯式分級速度控制又分為超前式和滯后式。
超前速度控制方式又稱為出口速度控制方式,給出列車的出口速度值,控制列車不超過出口速度。日本ATC采取超前式速度控制方式,采用設備控制優先的方法。列車駛出每一個閉塞分區前必須把速度降至超前式速度控制線以下,否則設備自動引發緊急制動,所以超前對出口速度進行了控制,不會冒出閉塞分區。
滯后速度控制方式又稱為入口速度控制方式,給出列車的入口速度值,監控列車在本閉塞分區不超過給定的入口速度值,采取人控優先的方法,控制列車不超過下一閉塞分區入口速度值。法國TVM-300列控系統采用人控優先的方法,進行滯后速度控制。因為在每一個閉塞分區列車速度只要不超過給定的入口速度值,就不會碰滯后式速度控制線。考慮萬一列車失控,在本閉塞分區的出口即下一閉塞分區的入口處的速度超過了給定的入口速度值,碰撞了滯后式速度控制線,此時觸發設備自動引發緊急制動,列車必然會越過第一紅燈進入下一閉塞分區,因此,必須增加一個閉塞分區作為安全防護區段,俗稱雙紅燈防護。
曲線式分級速度控制根據列車運行的速度分級,每一個閉塞分區給出一段速度控制曲線,對列車運行進行速度控制。列控設備給出分段的制動速度控制曲線是根據每一個閉塞分區的線路參數和列車自身的性能計算而定,閉塞分區的線路參數可以通過地對車信息實時傳輸,也可以事先在車載信號設備中存儲通過核對取得。因為制動速度控制曲線是分段給出的,每次只需一個閉塞分區線路參數。
(2)目標-距離速度控制
目標-距離速度控制采取的制動模式為連續式一次制動速度控制的方式,根據目標距離、目標速度及列車本身的性能確定列車制動曲線。連續式一次速度控制模式,若以前方列車占用的閉塞分區入口為追蹤目標點,則為準移動閉塞;若以前方列車的尾部為追蹤目標點,則為移動閉塞。
中國列車運行自動控制系統CTCS-2和CTCS-3級,采用目標-距離一次制動模式曲線方式。
車載設備根據地面傳送的移動許可和線路數據,車載信號設備根據列車性能計算出列車運行速度,若列車接近前方減速點時,即刻生成目標-距離一次制動模式曲線。目標-距離一次制動模式曲線縮短了制動距離,并可根據列車性能給出不同的模式曲線,提高了運輸效率。
目標-距離速度控制與分級速度控制的比較如圖1所示。
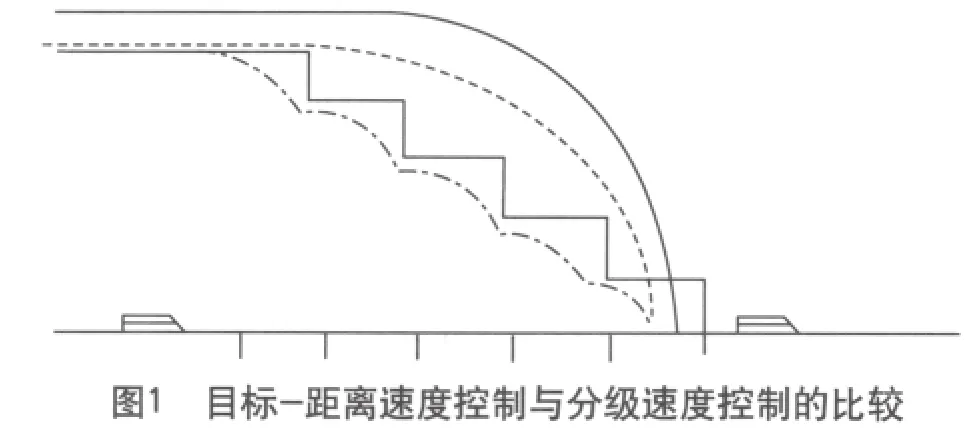
圖1中由外至內,粗實線為目標-距離一次制動模式的緊急制動曲線,點虛線為目標-距離一次制動模式的常用制動曲線,階梯式細實線為滯后階梯式速度監控曲線,點劃虛線為分級曲線式監控曲線。
3.2 車-地信息傳輸系統
列控系統采用的車-地信息傳輸系統是其主要的技術特征,決定了系統的構成和技術水平,也決定了列控系統能采用的控制模式。
車-地信息傳輸系統的主要技術指標是信息量的大小和單、雙向信息傳輸方式。
軌道電路方式信息量有限,模擬信號的UM71只有18個,只能構成臺階式控制模式的列控系統,數字化的UM2000有2指數,能構成連續式分級控制式的列控系統。兩者均屬固定閉塞。
CTCS-2級采用應答器+軌道電路方式,只能地對車單向信息傳輸,構成了連續速度控制模式,實現了準移動閉塞。
CTCS-3級采用無線通信方式,地與車能雙向信息傳輸,構成了更完善的連續速度控制模式,實現了準移動閉塞。
列控系統往往以車地信息傳輸方式命名,例如,基于軌道電路的列控系統、基于無線通信的列控系統。
4 列控系統各種控制模式比較
控制模式決定了閉塞方式和列車運行間隔,分級速度控制對應的是固定閉塞,目標-距離速度控制對應的是準移動閉塞,固定閉塞發展到準移動閉塞是一個重要的里程碑。
經過比較可以看出,目標-距離速度控制的優越性如下。
目標-距離速度控制模式制動的起始點是車載信號設備根據列車性能計算的,不是由閉塞分區分界來決定的,所以稱其為準移動閉塞,其列車運行間隔要小于固定閉塞。
目標-距離速度控制模式適用于不同性能的列車混合運輸,而固定閉塞的最小閉塞分區長度是由性能最差的列車來決定的,其對性能良好的列車是一種損失。
目標-距離速度控制模式司機能知道從最高速到目標點(停車點或限速點)全程的平滑速度曲線(含速度和距離),所以司機采用一次制動,與分級速度控制相比,減少了制動-緩解,再制動-緩解的過程,司機駕駛輕松,旅客舒適度好,全制動過程短,提高了旅行速度。
目標-距離速度控制模式(準移動閉塞)的能力與閉塞分區長度關系不大,所以,閉塞分區原則上可以等長劃分,可以充分利用軌道電路的最大長度,節省設備,減小設計工作量,便于施工。
列控系統各種控制模式比較如表1所示。
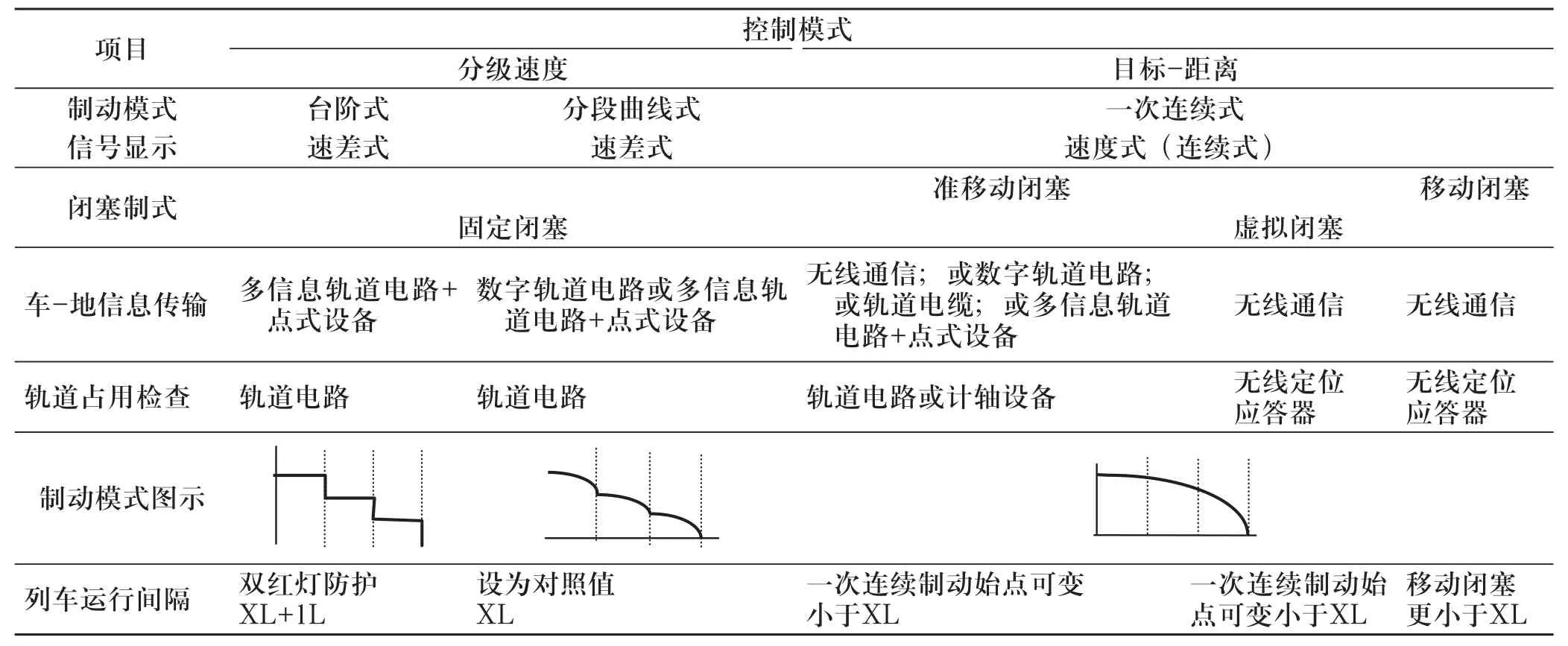
表1 列控系統各種控制模式比較表