基于動態(tài)貝葉斯網(wǎng)絡(luò)的威脅估計研究
2010-05-11 03:48:38肖兵沈薇薇金宏斌
自動化與信息工程 2010年4期
關(guān)鍵詞:能力
肖兵 沈薇薇 金宏斌
1 引言
態(tài)勢評估與威脅估計的關(guān)鍵是充分利用較低層次的信息融合數(shù)據(jù),在較高層次上對戰(zhàn)場態(tài)勢和威脅目標(biāo)進(jìn)行評估。戰(zhàn)場態(tài)勢評估重在對敵行為模式的表示,而威脅估計重在根據(jù)敵方的破壞能力、機(jī)動能力和行動意圖,綜合考慮敵我武器裝備性能、我方作戰(zhàn)任務(wù)和防御抗毀能力等要素,對敵方兵力的企圖和可能造成的威脅進(jìn)行推理判斷。根據(jù)這種推斷,指揮員能夠結(jié)合作戰(zhàn)指揮經(jīng)驗和原則,進(jìn)行合理的武器分配和有效的戰(zhàn)場管理。因此,威脅估計對指揮員準(zhǔn)確掌握敵情,正確決策、調(diào)整和使用兵力起到了非常重要的輔助作用。
由于威脅評估涉及主、客觀等多種因素,具有較強(qiáng)的不確定性,而基于概率的動態(tài)貝葉斯網(wǎng)絡(luò)具有強(qiáng)大的不確定性問題的處理能力,它利用現(xiàn)有的先驗信息,結(jié)合復(fù)雜的當(dāng)前信息,根據(jù)多個時刻的觀測值對系統(tǒng)的狀態(tài)進(jìn)行定性推理,增強(qiáng)了推理結(jié)果的準(zhǔn)確性。由于動態(tài)貝葉斯網(wǎng)絡(luò)的自然因果結(jié)構(gòu)和推理機(jī)制特別適用于戰(zhàn)場威脅估計的推理過程,因此利用動態(tài)貝葉斯網(wǎng)絡(luò)對戰(zhàn)勢威脅能力估計進(jìn)行研究具有很強(qiáng)的適用性和針對性。
2 威脅估計
由于威脅評估的目標(biāo)是確定敵方武器裝備、兵力結(jié)構(gòu)部署等對我方形成威脅的程度或等級,因此威脅要素提取、威脅度計算和威脅等級確定等都是威脅估計的主要功能。
2.1 威脅估計參數(shù)
為了估計目標(biāo)對保衛(wèi)對象的威脅值,首先必須確定影響該值的參數(shù)。通過對文獻(xiàn)資料的學(xué)習(xí)和對戰(zhàn)場作戰(zhàn)要素的分析,我們把影響威脅等級的參數(shù)分為以下三類:
(1)、臨近參數(shù)
用于度量目標(biāo)與保衛(wèi)對象的臨近程度,是進(jìn)行威脅估計必不可少的一類重要參數(shù),包括目標(biāo)與保衛(wèi)對象之間的相對最短距離、目標(biāo)到達(dá)保衛(wèi)對象的最少時間、目標(biāo)所攜帶武器對保衛(wèi)對象進(jìn)行打擊的預(yù)警時間等等。根據(jù)評估需要選擇不同的臨近參數(shù)及其度量。當(dāng)保衛(wèi)目標(biāo)處于威脅目標(biāo)的攻擊范圍內(nèi)時面臨的威脅最大。目標(biāo)越近,威脅越大,同類目標(biāo)具有相同距離但有不同的飛臨時間,則飛臨時間較小的目標(biāo)威脅程度較高。
(2)、能力參數(shù)
指目標(biāo)對保衛(wèi)對象產(chǎn)生威脅的能力。一個主要的能力參數(shù)是目標(biāo)類型,可通過敵我識別器的應(yīng)答、電子支援設(shè)施、速度等進(jìn)行判別。依據(jù)目標(biāo)類型(如導(dǎo)彈、攻擊機(jī)等),則可估測目標(biāo)攜帶武器情況,進(jìn)而可知威脅目標(biāo)的參數(shù)及其作戰(zhàn)能力。
此外,目標(biāo)的續(xù)航能力也是進(jìn)行威脅估計時較為關(guān)注的能力參數(shù)之一。目標(biāo)類型和續(xù)航能力等信息可用于判斷目標(biāo)的最大作戰(zhàn)半徑。
(3)、企圖參數(shù)
企圖參數(shù)的分類較為廣泛,指能夠揭示目標(biāo)作戰(zhàn)意圖的參數(shù)。敵方企圖的判斷是態(tài)勢評估的一個重要任務(wù),企圖參數(shù)也是影響威脅估計的最為重要的參數(shù)。在威脅估計中考慮的企圖參數(shù)包括:
1)、運動特性參數(shù),如目標(biāo)的速度、航向和高度,以及目標(biāo)最近的機(jī)動次數(shù)等。據(jù)此可分析目標(biāo)對保衛(wèi)目標(biāo)的攻擊意圖。
2)、領(lǐng)域參數(shù),如航路參數(shù)、敵目標(biāo)間的協(xié)同活動參數(shù)等。
3)、裝備狀態(tài)參數(shù),如雷達(dá)干擾和欺騙的使用、火控雷達(dá)是否開機(jī)工作等。
4)、政治環(huán)境參數(shù),重大的軍事對抗總有其深刻的政治背景,因此政治環(huán)境也是影響敵人作戰(zhàn)企圖的因素。
2.2 威脅估計方法
威脅等級評估是戰(zhàn)場態(tài)勢威脅評估中的關(guān)鍵部分,例如在傳感器管理中,當(dāng)有多個威脅目標(biāo)時,可根據(jù)威脅等級,有針對性地對探測資源進(jìn)行有效分配。因此確定威脅等級至關(guān)重要,甚至可以把計算威脅等級的過程稱之為威脅估計。
目前,常用的威脅等級評估方法很多。由于威脅等級評估的過程就是根據(jù)已知的各種戰(zhàn)場信息及其相互關(guān)聯(lián),形成對威脅等級主觀看法的思維過程,因而基于規(guī)則和模糊推理規(guī)則的算法在威脅估計中得到了開發(fā)與應(yīng)用[1,2]。
由于貝葉斯推理過程符合人的自然思維過程,并具有處理不確定性的能力,與態(tài)勢威脅估計中的因果判斷比較吻合,因此,基于Bayes網(wǎng)絡(luò)的威脅估計方法的研究與應(yīng)用已成為該領(lǐng)域的研究熱點之一[3~6]。
2.2.1 動態(tài)貝葉斯網(wǎng)絡(luò)
貝葉斯網(wǎng)絡(luò)又稱為概率網(wǎng)或信度網(wǎng),是概率論和圖論相結(jié)合的產(chǎn)物,其自然的因果表示方法是發(fā)現(xiàn)數(shù)據(jù)間的潛在關(guān)系的主要手段。動態(tài)貝葉斯網(wǎng)絡(luò)在推理過程中能將各個時刻的觀測值相互補充和修正,動態(tài)處理觀測值的不確定性,并對每個時刻的威脅狀態(tài)進(jìn)行實時估計,減少評估過程的主觀性,增強(qiáng)了推理結(jié)果的準(zhǔn)確性,滿足了軍事指揮對決策的及時性要求。
在動態(tài)貝葉斯網(wǎng)絡(luò)中,網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)、變量集合間的內(nèi)部關(guān)系在每個時間片下都是相同的,不同在于后繼時間片對前一時間的觀測值和估計值存在條件依賴關(guān)系。描述三個時間片的動態(tài)貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。
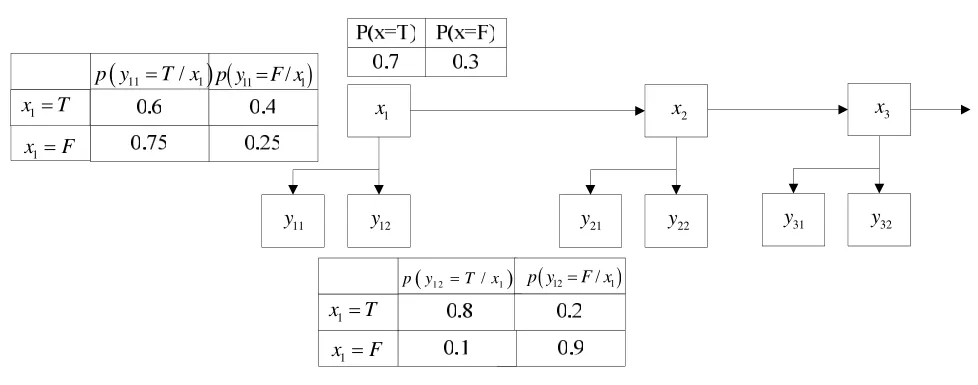
圖1 動態(tài)貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)
該網(wǎng)絡(luò)具有兩個觀測節(jié)點y和一個隱藏結(jié)點x,1x,2x,3x分別表示第一至第三個時間片的隱藏節(jié)點,11y,12y 分別表示1x下的兩個觀測節(jié)點。根據(jù)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)和先驗條件概率,即可選擇合適的算法進(jìn)行推理。
2.2.2 推理算法
文獻(xiàn)[7]提出的遞推算法迭代利用了當(dāng)前時間片的觀測值來修正前一時間片的推理結(jié)果。每個時間片在推理形式上與靜態(tài)貝葉斯網(wǎng)絡(luò)的推理機(jī)制相同, 但利用了當(dāng)前時刻及當(dāng)前時刻之前的所有觀測值,較好地適應(yīng)了威脅估計對精度和實時性的要求。本文將采用該方法對威脅程度進(jìn)行估計。
假設(shè)貝葉斯網(wǎng)絡(luò)中有隱變量 X , 剩余有 n 個隱藏變量Z1, …, Zn和m 個觀測變量Y1, …, Ym,并假設(shè)相鄰的時間片之間只有X存在條件概率關(guān)系,則動態(tài)貝葉斯網(wǎng)絡(luò)的遞推公式為
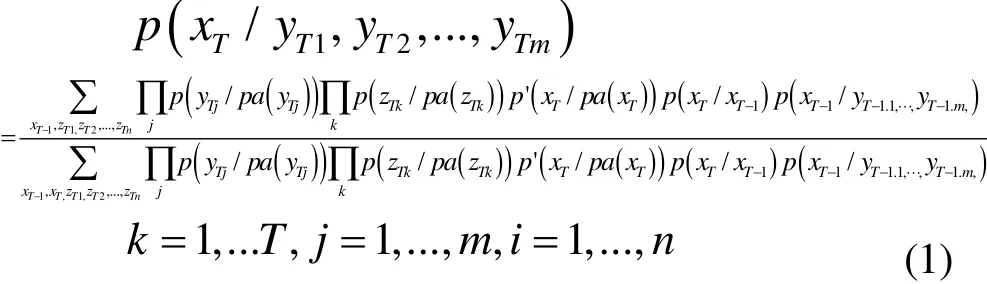
式中,yTj第一個下標(biāo)表示第T個時間片,第二個下標(biāo)表示該時間片內(nèi)的第j個觀測節(jié)點,p a (yTj)表示父節(jié)點的集合, p ' ( xT/ pa(xT))是單時間片網(wǎng)絡(luò)節(jié)點的條件概率, p(xT/ xT-1)是相鄰時間片之間的網(wǎng)絡(luò)轉(zhuǎn)移概率。

3 基于動態(tài)貝葉斯網(wǎng)絡(luò)的威脅估計模型
當(dāng)采用貝葉斯網(wǎng)絡(luò)進(jìn)行威脅估計時,首先必須針對具體問題分析提取相關(guān)的要素,確定威脅估計要素間的因果關(guān)系和條件依存關(guān)系,建立正確的網(wǎng)絡(luò)結(jié)構(gòu)模型,確定先驗概率和條件概率,并選擇合適的方法進(jìn)行推理。對于防空作戰(zhàn)而言,敵方飛行器臨近我方空域飛行,即對我保衛(wèi)對象構(gòu)成威脅,因此威脅評估的重點在于根據(jù)目標(biāo)觀測值的變化動態(tài)地對敵行動對我方構(gòu)成的威脅及時進(jìn)行估計。下面結(jié)合一個防空作戰(zhàn)的簡單實例,研究基于動態(tài)貝葉斯網(wǎng)絡(luò)的威脅估計方法。
3.1 威脅要素的提取及其量化
假定某時間段在我防空區(qū)域內(nèi)發(fā)現(xiàn)三個目標(biāo),據(jù)測報為導(dǎo)彈、轟炸機(jī)和偵察機(jī)。為了快速組織防空作戰(zhàn),需要盡快對各目標(biāo)對我方陣地造成的威脅等級進(jìn)行評估。由于造成敵性目標(biāo)產(chǎn)生威脅的因素很多,因此必須全面綜合考慮各種因素,才能使威脅評估結(jié)果真實地反映敵方目標(biāo)對我保衛(wèi)對象的威脅程度。通過對防空作戰(zhàn)案例的分析,以客觀性和可操作性為基本原則,選擇以下主要要素:威脅目標(biāo)的身份信息、威脅目標(biāo)的類型、我方防護(hù)能力、航向角、飛臨時間。其中威脅目標(biāo)的身份和航向角屬于企圖參數(shù),目標(biāo)類型和防護(hù)能力屬于敵我作戰(zhàn)能力參數(shù),飛臨時間屬于時間參數(shù)。
目標(biāo)身份:敵、我、中。顯然,敵目標(biāo)威脅最大,我方目標(biāo)威脅最小。當(dāng)進(jìn)行量化評估時,根據(jù)專家經(jīng)驗取值,如取值:[敵 中 我]=[1 0.6 0.1]。
目標(biāo)類型,是通過目標(biāo)識別得到的關(guān)于空中來襲目標(biāo)的屬性,如導(dǎo)彈、轟炸機(jī)、干擾機(jī)等。通常,威脅目標(biāo)類型為導(dǎo)彈,此威脅最大,取值為1;目標(biāo)類型為干擾機(jī),威脅為中,取值為 0.6;目標(biāo)類型為雷達(dá),威脅最小,取值為0.1。
我防護(hù)能力,指我方是否能夠承受攻擊而不被摧毀的能力。防護(hù)能力強(qiáng),威脅就小;防護(hù)能力弱,威脅就高。
航向角,指威脅目標(biāo)朝保衛(wèi)目標(biāo)飛來的可能性,如果是,則威脅最大;可能是,威脅居中;否,則威脅最小。
飛臨時間,綜合了威脅估計中關(guān)注的相對距離和速度信息,可為我方戰(zhàn)備提供預(yù)警時間。時間越短,威脅越大。
一般地,可根據(jù)具體問題和保障需求進(jìn)行威脅等級的劃分,如劃分為4個等級,即一等、二等、三等和四等,也常有3級劃分:高、中、低。本文為了簡化計算,把威脅等級按照“高、中、低”來劃分。
3.2 威脅估計的貝葉斯網(wǎng)絡(luò)模型
通過案例分析,并結(jié)合領(lǐng)域?qū)<医?jīng)驗,該威脅估計的動態(tài)貝葉斯網(wǎng)絡(luò)結(jié)構(gòu)和模型參數(shù)如圖2所示:
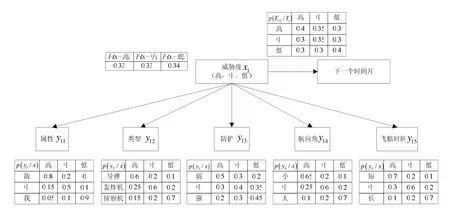
圖2 威脅估計的貝葉斯網(wǎng)絡(luò)模型
4 仿真與分析
網(wǎng)絡(luò)中觀測節(jié)點的證據(jù)之間是相互獨立的。我方發(fā)現(xiàn)目標(biāo)后,立即對三個目標(biāo)進(jìn)行實時跟蹤和觀察,連續(xù)觀測10個時刻,根據(jù)不同時刻得到的證據(jù),設(shè)定目標(biāo)10個時刻的觀測值。獲取到的觀測數(shù)據(jù)具有以下規(guī)律:目標(biāo)1航向角和飛臨時間都在減小;目標(biāo)2飛臨時間越來越短;目標(biāo)3只有航向角在減小。
目標(biāo)1的觀測值如表1所示,采用動態(tài)貝葉斯遞推算法獲得的威脅程度仿真結(jié)果見表2所示,目標(biāo)1的威脅趨勢圖見圖3所示,目標(biāo)2的威脅趨勢圖見圖4所示。
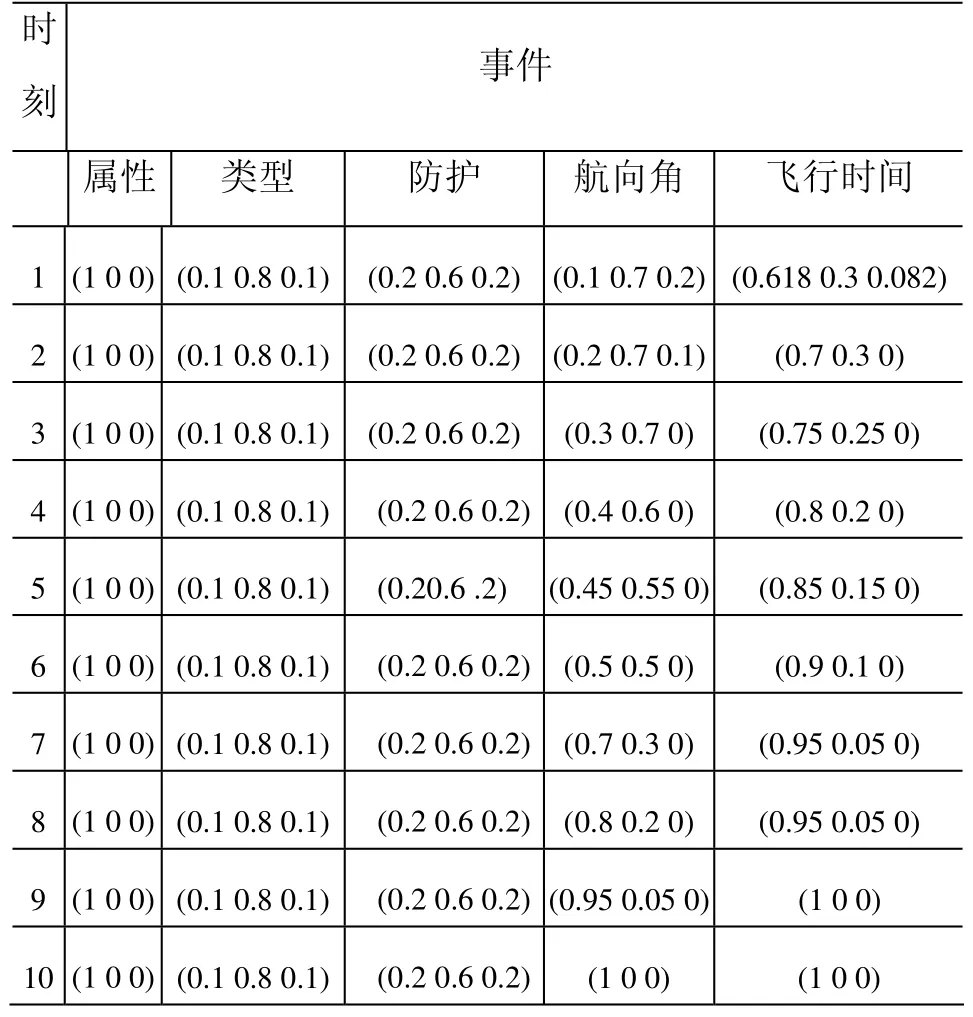
表1 目標(biāo)1的數(shù)據(jù)
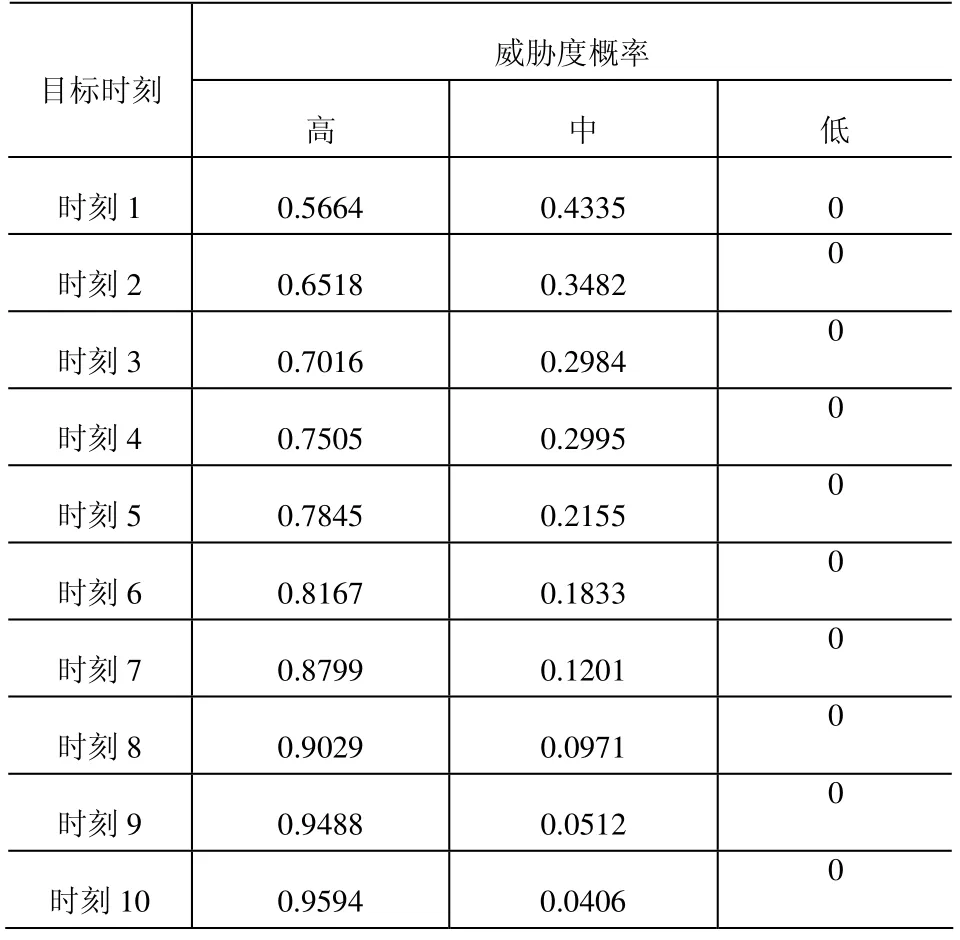
表2 目標(biāo)2的態(tài)勢推理仿真結(jié)果
從仿真結(jié)果可見,由于目標(biāo)1航向角和飛臨時間都在減小,對我方構(gòu)成的威脅逐漸增大,威脅等級為高的概率也從0.5664急劇上升到0.9594,與實際情況是吻合的,其他推理結(jié)果也與作戰(zhàn)想定是一致的。
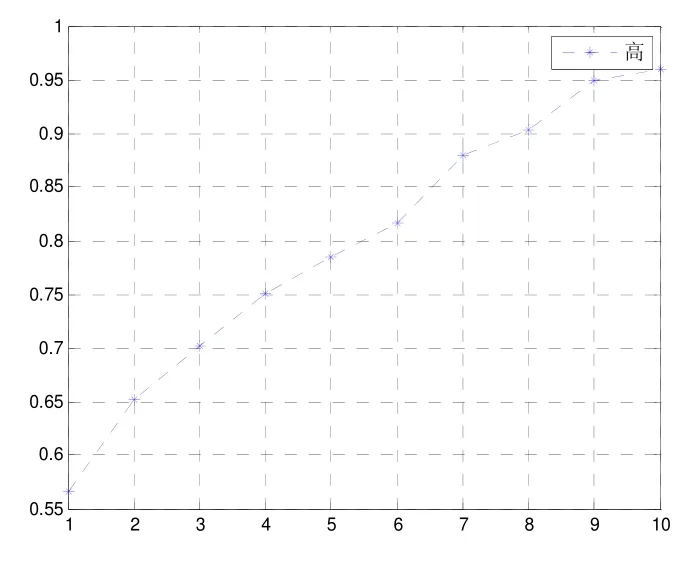
圖3 目標(biāo)1的推理仿真結(jié)果趨勢圖
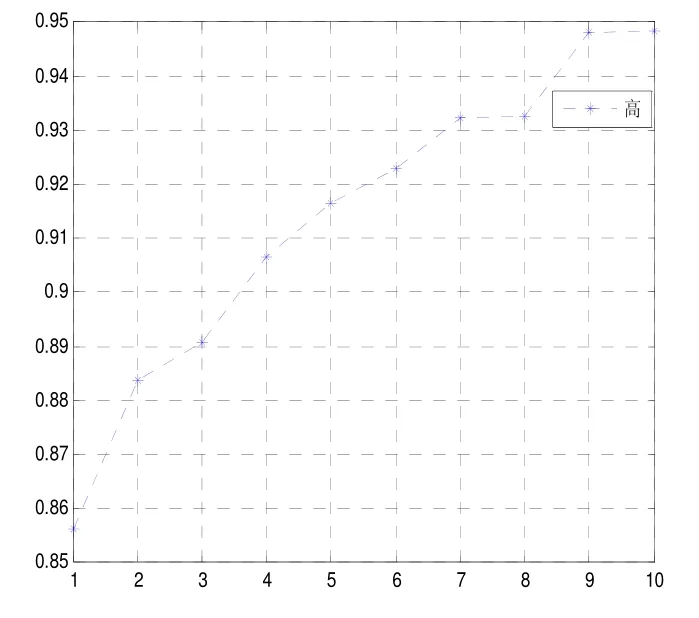
圖4 目標(biāo)2的推理仿真結(jié)果趨勢圖
5 小結(jié)
通過仿真我們已經(jīng)看到,貝葉斯網(wǎng)絡(luò)是用于威脅估計的既易于理解、又易于展示的有效工具。但是,由于貝葉斯網(wǎng)絡(luò)推理的基礎(chǔ)是網(wǎng)絡(luò)結(jié)構(gòu)和結(jié)構(gòu)參數(shù),而結(jié)構(gòu)模型是否能夠客觀反映戰(zhàn)場態(tài)勢及其威脅關(guān)系到威脅等級的判定。此外,由于貝葉斯網(wǎng)絡(luò)是在先驗概率基礎(chǔ)上進(jìn)行的推理,因此先驗概率的準(zhǔn)確與否會給威脅估計帶來一定的誤差。因此,如何通過網(wǎng)絡(luò)學(xué)習(xí)和參數(shù)學(xué)習(xí)提高模型精度,進(jìn)而提高威脅評估的準(zhǔn)確度和可信度是實際應(yīng)用中需要進(jìn)一步研究的課題。
[1] M. Liebhaber and B. Feher, “Air threat assessment: Research,model, and display guidelines,” in Proceedings of the 2002 Command and Control Research and Technology Symposium,2002.
[2] Y. Liang, “An approximate reasoning model for situation and threat assessment,” in Proceedings of the 4th International Conference on Fuzzy Systems and Knowledge Discovery,2007.
[3] 史建國, 高曉光, 李相民. 基于離散模糊動態(tài)貝葉斯網(wǎng)絡(luò)的空戰(zhàn)態(tài)勢評估及仿真[J]. 系統(tǒng)仿真學(xué)報,2006,18(5):1093-1100.
[4] 冀俊忠, 劉椿年, 沙志強(qiáng). 貝葉斯網(wǎng)模型的學(xué)習(xí)、推理和應(yīng)用[J]. 計算機(jī)工程與應(yīng)用, 2003,39 (5):242-27.
[5] 孫兆林, 楊宏文, 胡衛(wèi)東. 基于貝葉斯網(wǎng)網(wǎng)絡(luò)的態(tài)勢估計方法[J]. 計算機(jī)應(yīng)用, 2005, 25(4):745-747.
[6] N. Okello and G. Thoms, “Threat assessment using Bayesian networks,”in Proceedings of the Sixth International Conference on Information Fusion, 2003.
[7] 史建國,高曉光. 離散動態(tài)貝葉斯網(wǎng)絡(luò)的直接計算推理算法[J]. 系統(tǒng)工程與電子技術(shù), 2005,27(9):1626-1630.
[8] A. Benavoli, B. Ristic, A. Farina, M. Oxenham, and L. Chisci,“An approach to threat assessment based on evidential networks,” in Proceedings of the 10th International Conference on Information Fusion, 2007.
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(shè)(2018年6期)2018-08-16 07:23:10
新高考(英語進(jìn)階)(2018年1期)2018-04-18 14:00:11
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
