Link16數據鏈通信組網技術分析
2010-05-15 00:30:02于國榮
無線電通信技術 2010年3期
于國榮
(中國電子科技集團公司第二十八研究所,江蘇 南京 210007)
0 引言
Link16數據鏈是被美國海軍、聯合部隊和北約部隊廣泛使用的一種新型戰術數據鏈路的名稱。它是一種高性能、多功能、安全、抗干擾的戰術數據鏈路,是聯合戰術情報分配系統(JTIDS)的基礎通信傳輸網絡。16號鏈路在戰術數據鏈路的信息交換方面,很大程度上依然秉承了11號鏈路和4A號鏈路的基本原理,可以與Link-11或Link-4A互操作,但它在一些技術和操作上有了較大改進,提高了現有戰術數據鏈的能力,現已成為美國國防部用于戰術指揮、控制、通信和情報的主要戰術數據鏈。
美軍從70年代開始研制,對Link-16數據鏈終端設備已經經過3次改良設計,最初的1級終端開發于20世紀70年代,設備具有體積大、重量重的特點,因此主要應用在美國和北約地面報警與控制系統和海軍艦艇上。隨著需求和大規模集成電路技術的發展,美軍又陸續開發了體積更小、容量更大、重量更輕的2級和2H級終端,在美空軍、海軍、海軍陸戰隊的空中平臺上裝備。此外,一個體積更小、質量更輕的2M終端正被應用于軍隊空中防御和彈道飛彈防御組織終端導彈防御系統。
1 系統通信模式
1.1 系統通信方式
Link16數據鏈共有表1所示的3種通信方式。模式1是系統正常工作方式。模式2和模式4工作方式下,系統容量和能力有所下降。
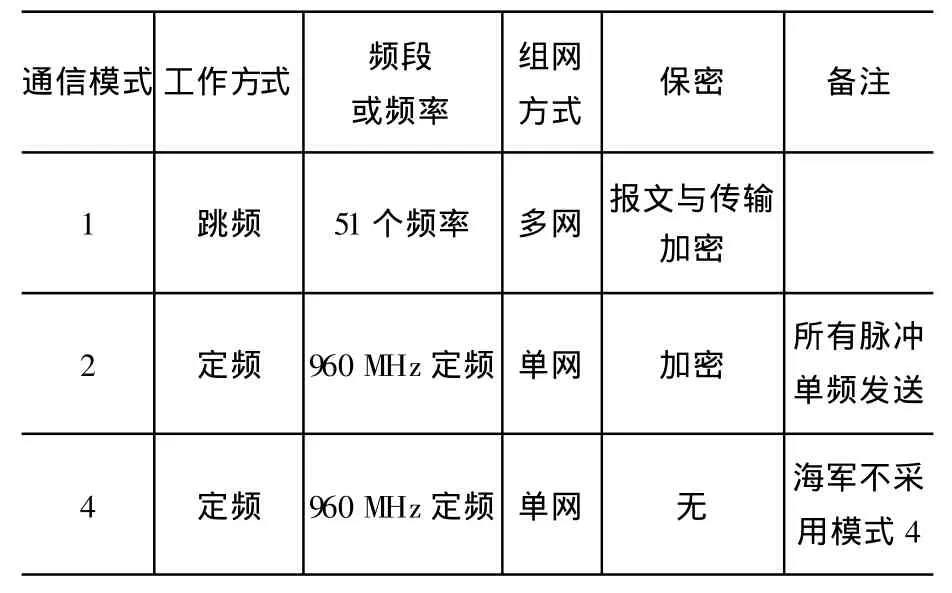
表1 系統通信方式
1.2 通信頻段與頻率分配
Link16數據鏈采用UHF頻段的Lx波段,即960~1215MHz,是一種視距通信頻段。艦對空通信距離150海里,空對空通信距離300海里,艦對艦通信距離25海里。為了連接不同的作戰群,需要使用中繼站延伸通信距離。
在Link16使用的960~1215MHz頻段范圍內,民用與軍用空中導航系統、敵我識別設備也工作在該頻段。如民用測距設備(DME)和軍用戰術空中導航(TACAN)設備,它們的信道間隔為1MHz。敵我識別設備使用了1030MHz與1090MHz周圍的2個子頻帶。JTIDS設備信道間隔為3MHz,在該頻段內要兼顧以上3種設備的頻率分配和正常工作。
(1)Link16頻率分配
Link16系統分配了51個信道頻率,發射脈沖頻率在這51個頻率上跳頻工作。標準跳變速率76923H/s。
(2)測距設備
測距設備是一種民用導航設備,包括機載詢問器和地面應答機。機載詢問器在1025~1125MHz頻段分配了126個信道,信道間隔為1MHz。地面應答機在962~1024MHz以及1151~1213MHz,共分配了126個信道,應答機可任選一個信道應答。
(3)戰術空中導航(TACON)系統
TACON系統是一種軍事導航系統,兼有測距與測向功能。工作在962~1213MHz頻段,信道間隔為1MHz。目前,機載JTIDS設備功能中已經包含TACON系統功能。
(4)敵我識別設備
空中交通管制雷達信標系統(ATCRBS)/敵我識別(IFF)設備使用中心頻率為1030MHz與1090MHz周圍的2個子頻帶。地面詢問機以1030MHz頻率每秒大約發射400個脈沖對詢問,機載應答器在1090MHz頻率上發射應答信號脈沖代碼,包含標識、高度和識別其他飛機所需要的信息。
1.3 頻譜要求
為了避免JTIDS系統與民用與軍用空中導航系統、敵我識別設備間的相互干擾,必須對Link16終端發送的脈沖功率譜和波段外輻射特性加以嚴格限制。在中心頻率3MHz范圍內,脈沖功率譜不受限制;在±3MHz處,必須低于10dB;在±15MHz處,必須低于60dB。波段外輻射特性,如寬帶噪聲、邊帶干擾、諧波和其他寄生輻射等,必須低于65dBmW/kHz。
2 系統設備入網與同步
系統設備入網是通過接收網絡基準時間設備發送的入網報文的粗同步和精同步過程實現的。系統終端能夠自動地與網絡基準時間建立與保持同步。要建立網絡同步,系統必須單獨設定一個終端為網絡提供時間基準,這個終端被稱為網絡時間基準(NTR)。由這個選定終端保持的時間定義為系統網絡時間。以這個時間為基準,再來定義時隙的起點與終點,并確保多重網絡中“時分”的校準。網絡時間基準終端周期性地發送入網報文,幫助系統其他終端與網絡同步并獲得系統時間。
在16號鏈路中,每個節點的工作時隙都是預先設置好的,無論某一具體終端設備是否參與通信,鏈路都會運行。與節點關系最密切的是網絡時間基準,網絡時間基準主要用于啟動網絡。對于設備而言,網絡時間基準的作用是使設備進入且與網絡保持同步。當網絡建立起來后,在沒有網絡時間基準的情況下,網絡仍能繼續運行數小時。
同步分為粗同步與精同步。第1步是粗同步,當一個終端收到網絡基準時間終端發出的入網報文后,就可以實現粗同步。第2步是精同步,當終端與網絡基準時間終端完成時間基準往返計時報文交換后,就實現了精同步。
系統將一個終端相對于系統時間的準確度,稱為該終端的時間值,用Qt表示。終端可以通過周期性地發送往返計時報文和測量所有接收報文到達時間,用于連續改進自己相對于系統時間的時間精度。
2.1 粗同步
終端設備通過不斷調整接收入網報文的時隙,搜索接收入網報文。一旦終端接收到入網報文,就處于粗同步狀態。終端實現粗同步后,也就知道了一個時隙內的系統時間,并能開始傳送往返時間詢問數據。
2.2 精同步
終端實現粗同步后,就可以向網絡時間基準設備發送一個往返計時詢問,在同一時隙內,網絡時間基準設備會作出應答反應。這個應答包含了詢問抵達網絡基準設備的時間,利用測得的應答抵達時間和接收的詢問抵達時間,終端就能夠進一步校正自己的系統時間,并消除傳播誤差,從而實現精同步。
如果終端當前時鐘精度能夠保持在15min之內,時鐘誤差小于36μs,就可確定為精同步狀態;如果時鐘誤差大于54μs,設備就重新進入精同步過程。精同步狀態下的終端能保持足夠精確時間連續運行3小時以上。
2.3 間接同步
系統設備與網絡時間基準設備之間傳送往返計時報文的過程稱為主動同步。如終端處于網絡時間基準設備的通信范圍內,幾秒之內就可實現主動同步。當終端處于無線抑制狀態,必須通過間接同步即被動同步方式實現同步。當終端實現粗同步后,因不能發送往返計時詢問報文,而是接收精確定位與識別網絡參與群的位置報文。利用精確定位與識別網絡參與群的位置報文通報中的設備位置和從其導航系統獲得的自身位置信息,終端就可估算報文所需要的傳播時間。通過比較抵達的預計時間和實際時間,終端可以調整系統時間來消除誤差實現同步。
3 系統網絡體系
16號鏈路支持單網和多網同時工作。系統網絡采用TDMA通信方式,利用時間間隔掃描提供多路近似同步的通信線路。每條線路及其參與者在所分配的特定時隙內進行發送與接收,形成16號鏈路通信體制。系統網絡體系可以分為定頻單網工作、同功能層疊網絡、異功能多重網絡、異步網絡等多種組網方式。同功能層疊網絡與異功能多重網絡都是同步跳頻網,一個時元內的時隙都是同步的,采用設計好的跳頻圖案算法,可以保證同一時隙內,各子網的載頻脈沖互不相同,無頻率干擾。異步網絡是各網有自己時間基準的獨立網絡。
每一多重網有一個網號,不同的網號決定跳頻形式,系統設計給出了127個網號。在任何給定的時隙中,一個入網單元在127種可用網絡上不是在發送數據,就是在接收數據。
3.1 單網結構
16號鏈路單網結構是指彼此相互交換信息的一組參與者構成的通信網絡,1個12.8min的時元周期,被分成98 304個7.8125ms的時隙。單網時隙結構如圖1所示。模式2和模式4規定的960MHz定頻、加密和不加密通信方式均為單一網絡結構。
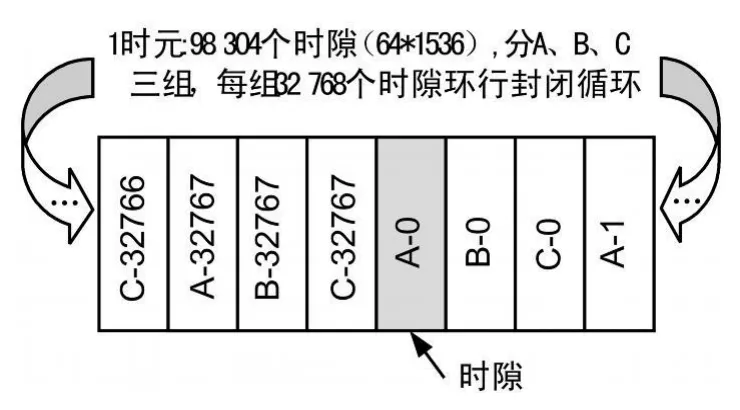
圖1 單網時隙結構
單網結構中,可以通過定義最大64個互相不關聯的時隙分區,分配給不同的網絡參與群,實現不同網絡參與群的同時收發。
3.2 多網結構
多網結構是指系統通信模式1規定的跳頻、加密多網工作方式。系統波形允許定義127個不同的網絡,根據各個網絡的報文加密密碼、傳輸加密密碼和網絡編號相同與否,可以構成不同的多網結構。各個網絡的跳頻圖案由其網絡編號、傳輸安全密碼變量(信道加密密碼)和時隙數共同確定。這些不同的跳頻圖案保證了各個網相互獨立與不同,可以并行操作。多網結構可分為多重網絡、層疊網絡結構和異步多網結構。
多重網絡僅通過某一具體的網絡參與群設定不同的網號就可以建立起來,而無需改變傳輸安全和報文安全密碼變量參數。如果改變傳輸安全和報文安全密碼變量(通信領域稱為信道加密和信源加密),包括盲中繼在內的網絡多重化就可能發生多種變化。網絡多重化的最普遍形式是層疊網絡和加密網絡。當2個系統具有相同的傳輸安全密碼變量參數、相同的網絡編號,但報文安全密碼變量參數不同時(兩網終端互相接收對方信息,但不能解析信息),就會產生盲中繼,這也是網絡多重結構的形式之一。
3.2.1 同功能層疊網
同功能層疊網是具有相同功能的網絡參與群、相同傳輸安全參數、不同網號的多個子網,通過共用同組時隙建立的多重網絡,簡稱層疊網。層疊網限定終端的網絡編號在127之內,層疊網可以有不同的網號和相同的信息加密密碼,也可以是不同的網號和不同的信息加密密碼。只要改變網絡編號,平臺就可以從一個網絡切換到另一個網絡,終端不需要初始化。
層疊網各子網執行的任務與功能相同,所用時隙必須同組,并具有相同的初始時隙數和重復率。這種網絡結構,多個網絡中的相同參與群可以同時在同一組時隙收發工作,時隙可以同時共用。子網之間沒有時隙沖突,相當于單網使用一個時元的所有時隙。多網結構中,時隙利用率最高的網絡結構,可以最大限度的利用系統時隙,提高系統數據吞吐量。
層疊網實現同組時隙同時共用的原理是各網在同一時隙內發射脈沖載頻互不相同,各子網獨立工作,相互之間無干擾,從而實現時隙共用。層疊網類似于通信領域所說的正交跳頻網,頻率正交關系如圖2所示。
網絡當前載波的跳頻圖案由傳輸安全密碼變量、網絡編號和時隙數共同確定。層疊網的這3個參數中,只有各網網絡編號不同,意味著可以實現頻率正交的跳頻圖案,由于這些子網的工作時隙相同,而頻率各不相同,因此不會產生相互干擾。
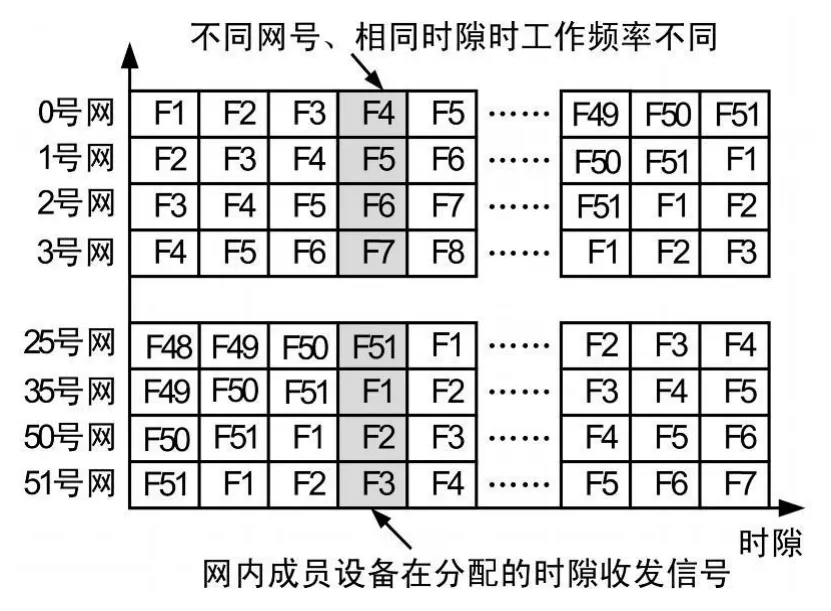
圖2 層疊網的正交跳頻時隙結構
3.2.2 異功能多重網絡
在16號鏈路系統中,不同的網絡參與群被分配了不同的數據鏈功能,如網絡參與群7是監視功能,網絡參與群12和13分別是話音A和話音B功能,網絡參與群10是電子戰功能。實際上,不是所有用戶都要參與數據鏈的每一個功能,對具體用戶來說,網絡中的部分功能是相互排斥的,如網絡參與群10的電子戰功能與高更新率的網絡參與群14的間接精確定位與識別功能(PPLI)就是相互排斥的。定義由分配了功能相互排斥的網絡參與群子網絡組成的多網稱為異功能多重網絡,簡稱多重網絡。多重網絡與層疊網絡的不同在于:各個子網絡參與者執行不同的功能,并且不能有選擇地從一個子網絡切換到另一個子網絡。
與層疊網相同,多重網絡中的各個子網絡的時隙也是相互同步的,某個子網絡中的一個時隙與其他子網絡中所對應的時隙完全一致。多重網絡結構是具有時隙邊界一致的127個單網結構的疊加,可以想象成由98 304個“時隙條”條構成的圓柱體。
在重疊的網絡結構中,操作者可以選擇使用某一個網絡。與層疊網相同,每個網絡都有一個獨特的跳頻模式用于發射信號。雖然理論上可以構建127個網絡的多重網絡,但統計研究標明,在同一地區同時使用20個網絡會降低通信質量。
3.2.3 異步多網結構
異步多網結構就是通信領域中的時間不同步的異步網。在異步多層網絡中,每個網絡都具有不同的傳輸安全和報文安全特性,且彼此是獨立的,并有各自設定的網絡時間基準。在相同的工作區域內,這種完全隔離的多層網絡結構允許多個獨立網絡共同存在,但由于各個網絡互不同步,產生頻率碰撞的風險加大。
4 結束語
通過對Link16數據鏈的通信組網技術的綜合分析研究,深入地探討了Link16數據鏈的通信模式、設備入網與同步方式,對組成系統單網結構、多網結構中的同功能層疊網、異功能多重網和異步多網結構作了進一步的闡述,希望為更好地理解和掌握外軍數據鏈相關性能提供有益的幫助。
[1]于國榮.Link16數據鏈通信抗干擾技術分析[J].戰術通信研究,2008(4):7-11.
[2]駱光明,楊斌,邱致和,等.數據鏈[M].北京:國防工業出版社,2008.
[3]梅文華,蔡善法.JTIDS/Link16數據鏈[M].北京:國防工業出版社,2007.
[4]孫繼銀,付光遠,車曉春,等.戰術數據鏈技術與系統[M].北京:國防工業出版社,2007.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57