色爾古水電廠機組出力不穩(wěn)現象的分析與處理
2010-05-16 09:10:00趙松峰鄧小剛白劍飛李春雷
水電站機電技術 2010年3期
趙松峰,鄧小剛,白劍飛,梁 薇,黃 穎,李春雷
(1.北京中水科水電科技開發(fā)有限公司,北京 100038;2.阿壩水電開發(fā)有限公司,四川 成都 610036)
色爾古水電廠機組出力不穩(wěn)現象的分析與處理
趙松峰1,鄧小剛1,白劍飛1,梁 薇1,黃 穎2,李春雷2
(1.北京中水科水電科技開發(fā)有限公司,北京 100038;2.阿壩水電開發(fā)有限公司,四川 成都 610036)
本文論述了色爾古水電廠投運過程中,如何處理機組并網后水輪機不能處于穩(wěn)態(tài),出力(有功功率)出現不規(guī)則波動的問題,從原理和試驗兩個角度剖析了該問題的根源,并針對色爾古水電廠的功率不穩(wěn)定的現象,提出了解決這一問題的合理可行的方案。
色爾古水電廠;水輪機;出力;有功功率;穩(wěn)態(tài);計算機監(jiān)控系統(tǒng)
0 概述
色爾古水力發(fā)電廠位于四川省阿壩州黑水縣色爾古鄉(xiāng),是黑水河流域水電規(guī)劃“二庫五級”開發(fā)方案中的第四級梯級電站,該工程以發(fā)電為主,安裝3臺引水式50MW水輪發(fā)電機組,總裝機容量150MW,引水隧洞長10km。電站2號、3號機組已分別2009年6月20日、29日完成72h試運行,正式投入商業(yè)運行。
在2號機組調試投運過程中,發(fā)現并網之后,當有功功率調節(jié)到給定值,調節(jié)完成之后,機組的有功功率顯示會向上或者向下無規(guī)律波動,并且波動范圍超出了調度的允許誤差范圍(+2%),甚至達到了10%之多。影響了投入商業(yè)運行的條件。
1 出力不穩(wěn)現象根源分析
水輪機的主要工作參數是表征水流通過水輪機,水流的能量轉換為轉輪機械能過程中的特性數據,水輪機的主要工作參數有:水頭H、流量Q、出力P、效率η、轉速n。
水輪機水頭H是指凈水頭,即水輪機的工作水頭。水輪機的工作水頭可表示為:

式中Hg——水電站毛水頭,為上下游水位差值;Δh——水電站建筑物中的水力損耗。
從式(1-1)可知:水輪機的工作水頭隨上下游水位的變化而改變,但是色爾古水電站在并網發(fā)電時,上下游水位基本無變化,即便有10cm的變化,相對于90m的毛水頭來講,也只有千分之一,故可以認為在凈水頭在出力不規(guī)則波動問題的過程中是沒有變化的。
水輪機的流量Q是指單位時間內通過水輪機某一既定過流斷面的水流體積,在設計水頭下,水輪機在額定轉速、額定出力運行時所對應的流量是水輪機額定出力時所需要的最大流量。
水輪機的轉速n是指水輪機在單位時間內的旋轉的轉數。
水輪機的出力P是指水輪機軸端輸出的有功功率,水輪機的輸入功率為單位時間內通過水輪機的水流的總能量,即水流的出力,但是水流通過水輪機時存在一定的能量損耗,例如:(1)水輪機的水力損失,水流經過水輪機的蝸殼、導水機構、轉輪、尾水管等部位時都會產生摩擦、撞擊、渦流、脫流等水力損失;(2)水輪機的容積損失,在水輪機的運行過程中有一小部分流量從水輪機的固定部件和旋轉部件之間的間隙中漏出,這部分流量沒有對轉輪做功;(3)水輪機的機械損失,如軸承與密封處的摩擦損失、轉輪外殼與周圍水之間的摩擦損失等[1]。這三種損耗決定了水輪機的效率η。
一臺安裝調試完畢之后的水輪機,水輪機的水力損失、容積損失、機械損失都是不變的常量,不會因為其他因素的變化而變化,故可以排除水輪機的效率η對機組出力不穩(wěn)現象的影響。
而水輪機出力P可表示為:

式中Υ——水輪機常量參數;Q——水輪機的流量;
H——水輪機的工作水頭;η——水輪機的效率。
若水輪機旋轉力矩用M表示,旋轉角速度用ω表示,則水輪機出力P還可表示為:

式中M——水輪機旋轉力矩;ω——旋轉角速度;
n——水輪機的轉速。
通過式(1-2)可以得出水輪機出力P與三個變量:水輪機水頭H、水輪機的流量Q、水輪機的效率η有關,而前面已經分析過水輪機水頭H、水輪機的效率η兩個因素對本文提到的出力不穩(wěn)的現象沒有影響,而唯一存在變化因素的只有水輪機的流量Q一個量。
另外通過式(1-3)也可以知道,水輪機旋轉力矩M對一臺生產成型的水輪機來說是常量,影響出力P的唯一變化因素就是水輪機的轉速n,而在工作水頭不變的情況之下引起水輪機的轉速n變化的因素也只有水輪機的流量Q。
通過理論分析可以基本確定機組的出力不穩(wěn)是由于過機流量的不穩(wěn)定而造成的。
但是在水輪機當時工況下,調速器采集數據顯示導葉開度維持不變,而上下游水位在當時的情況之下肯定是沒有變化的(監(jiān)控系統(tǒng)采集數據顯示也確實沒有變化),機組的效率也是既定的常量,其他再沒有可以影響流量Q使之波動的變量。按照表面現象所有變量都沒有波動,故機組出力P是不應該波動的。而實際情況是機組有功功率顯示值在無規(guī)則波動,我們對比了計算機監(jiān)控系統(tǒng)采集的有功數據、調速器采集的有功數據、勵磁系統(tǒng)采集的有功數據均顯示有功確實存在波動,排除了數據采集失真的可能性。數據反饋正常,說明唯一影響機組出力的變量水輪機的流量Q存在波動,而流量Q波動的唯一可變因素是導葉開度,初步判定調速器采集到的導葉開度不變的數據可能不準確。
上述分析都是鑒于理論分析和實際工作經驗做出的初步判斷,至于水輪機的導葉開度到底是否真的存在波動,要做進一步試驗才能驗證。根據現場設備的狀況,機組處于發(fā)電狀態(tài)時,在導葉接力器鎖錠上架起百分表,對導葉接力器鎖錠的位移量做了測量,結果顯示導葉接力器鎖錠最大存在0.5mm的位移量,且位移的開關方向與機組出力P的大小波動完全一致,進一步斷定是由于水輪機導葉開度的變化引起了機組出力P的波動,由于接力器鎖錠的位移量很小(但是對機組出力的影響很大),加且調速器系統(tǒng)數據采集精度不夠,測量不到導葉開度的變化。
由于機械測量精度有限,且不能直觀的看到導葉開度的變化對應影響有功功率變化的幅度,為了最終確定波動原因,用中儀器對機組有功功率和導葉開度做了電氣測量和錄波,電氣測量得到的波形顯示有功功率完全跟隨導葉開度的波動在上下浮動,波形趨勢完全吻合。證明機組出力不穩(wěn)的原因所在:導葉開度的不穩(wěn)定。
2 問題處理方案
2.1 處理方案
為了能使2號、3號機組順利進入正常運行,經業(yè)主、廠家、設計討論之后,決定由計算機監(jiān)控系統(tǒng)實施有功功率跟蹤調節(jié)模式,對機組的有功功率實時追蹤,只要機組有功功率波動出了給定值+2%的誤差允許范圍,就立即自動進行有功規(guī)律調節(jié),把機組出力調節(jié)至允許的誤差范圍之內。
這樣處理的弊端就是由于機組不能處于一個穩(wěn)定狀態(tài),一旦機組出力超出允許范圍,計算機監(jiān)控系統(tǒng)就會對調速器系統(tǒng)發(fā)出有功功率調節(jié)指令,頻繁的調節(jié)動作可能會導致調速器系統(tǒng)油泵頻繁打油,導葉接力器也頻繁動作,長此以往,勢必影響調速器系統(tǒng)油泵、導葉接力器的使用壽命。記錄油泵運行時間間隔,結果發(fā)現調速器油泵兩次打油時間平均間隔大約在1h,不是很頻繁,征詢調速器系統(tǒng)廠家意見,確定基本不影響設備正常使用。
2.2 處理此問題前正常有功功率調節(jié)模式
圖1表示了常規(guī)水電站的有功功率調節(jié)過程:當接收到有功功率調節(jié)命令,即開始進行有功功率調節(jié),給調速器系統(tǒng)發(fā)送功率調節(jié)脈沖,調節(jié)脈寬決定有功功率調節(jié)的幅度,當把有功功率實發(fā)值調節(jié)到與有功功率給定值之差小于設定的死區(qū)時,結束本次調節(jié)過程;或者調節(jié)了3min有功功率實發(fā)值調節(jié)到與有功功率給定值之差還沒有小于設定的死區(qū)時,調節(jié)超時,也結束本次調節(jié)過程。
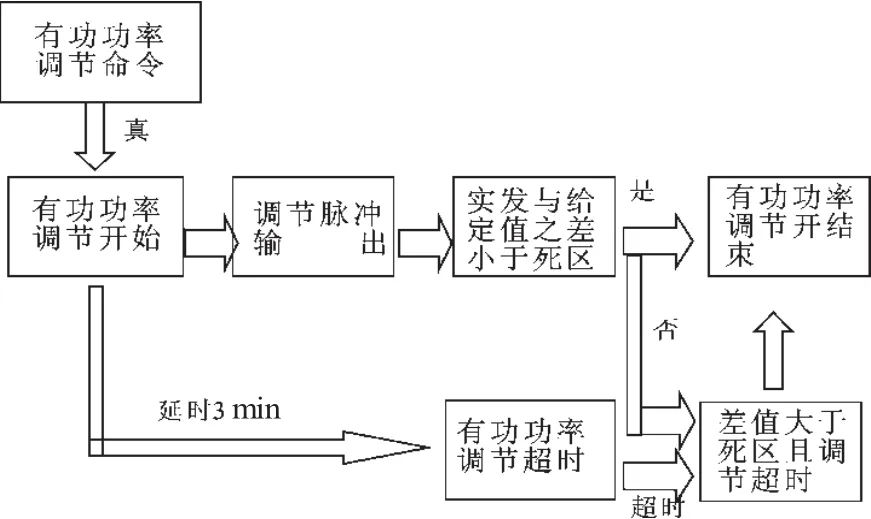
圖1 計算機監(jiān)控系統(tǒng)有功功率調節(jié)過程示意圖
對于正常的能處于穩(wěn)態(tài)的機組,當有功功率調節(jié)到給定值之后能夠保持穩(wěn)態(tài),保持導葉開度不變,維持機組出力穩(wěn)定不變。有功功率調節(jié)完成后,不用再去追蹤處理有功功率,除非再次收到有功功率調節(jié)命令,才會再次去調節(jié)有功功率。
H9000計算機監(jiān)控系統(tǒng)在正常情況下均采用上述調節(jié)模式。
2.3 處理此問題后有功功率調節(jié)模式
色爾古站出現的問題是有功功率調節(jié)至給定目標值之后,機組不能處于穩(wěn)態(tài),有功會出現波動,且波動幅度較大,顯然常規(guī)的調節(jié)模式無法保證本站的有功功率調節(jié)完成之后,有功功率一直保持在調度要求的+2%的誤差允許范圍,就無法進入正式運行。
針對此問題,對有功功率調節(jié)模式做了相應的處理,采用H9000系統(tǒng)中有功跟蹤模式,以解決上述問題。

圖2 色爾古水電站計算機監(jiān)控系統(tǒng)有功功率調節(jié)過程示意圖
如圖2所示,根據色爾古電站的實際情況,實現了有功功率的跟蹤調節(jié)功能:當機組的有功功率跟蹤功能在投入狀態(tài),機組發(fā)電過程中,當有功功率調節(jié)超時若有功實發(fā)值與給定值之差仍大于死區(qū)值,則延時t s自動啟動下一次有功功率調節(jié)過程,直到調節(jié)到目標值為止;當機組的有功功率跟蹤功能在投入狀態(tài),機組發(fā)電過程中,當有功功率調節(jié)到目標值,有功功率調節(jié)結束后,若機組有功再次出現波動,且波動幅度超出給定值+2%的范圍,持續(xù)時間超過設定的t s,則也會自動啟動下一次有功功率調節(jié)過程。
此種有功功率調節(jié)模式就完全解決了色爾古電站機組發(fā)電狀態(tài)時穩(wěn)態(tài)性差的問題,在發(fā)電運行過程中只要有功功率偏離給定值就及時進行調節(jié),使之完全符合商業(yè)運行調度所要求的有功誤差要求。且本方案解決問題用時短,成本低,保證了機組能夠順利按時進入正式運行。
3 解決方案結果檢驗
有功、無功功率調節(jié)是計算機監(jiān)控系統(tǒng)重要功能之一,是計算機監(jiān)控系統(tǒng)以自動方式取代人工手動調節(jié)方式、以精確的計算機精準調節(jié)取代手動粗放型調節(jié),進而促使整個電站實現“無人值班”(少人值守)的重要手段。
鑒于前面所論述的問題的前提下,計算機監(jiān)控系統(tǒng)通過對機組有功功率即時調節(jié)的解決方案經過實踐證明,完全可行,并且在小成本的情況下,是時間短,較為合理的方案。
在發(fā)電機組實際運行過程中,該方案確實解決了色爾古電站機組出力波動的問題,經過運行觀察,通過有功功率跟蹤調節(jié)功能,在機組有功功率發(fā)生波動的時候,只要波動幅度超出+2%,就會對機組有功功率進行調節(jié),保持機組有功功率穩(wěn)定在電網調度允許的范圍內,同時觀察調速器系統(tǒng)油泵發(fā)現,沒有出現頻繁啟動打油的情況。說明本解決方案完全可靠、合理。本文中有功調節(jié)誤差2%、3min、ts等數值是針對具體機組而言,這些數值在其它電站視機組具體情況而定。
[1]鄭源,鞠小明.水輪機[M].南京∶中國科學文化出版社,2003.
TP273+.5
B
1672-5387(2010)03-0040-03
2010-04-28
趙松峰(1983-),男,本科,助理工程師,從事水電站計算監(jiān)控系統(tǒng)設計、調試工作。(E-mail∶iwhr_zsf@163.com)
