核電站穩壓器水位控制系統數字化的實現及優化方案
2010-05-23 08:42:36郭存熙蔣明瑜林日中
中國核電 2010年2期
付 敏,李 巖,郭存熙,蔣明瑜,林日中
(中科華核電技術研究院有限公司北京分公司,北京 100086)
穩壓器水位控制系統在反應堆控制系統中是一個很典型的控制系統,而現役大亞灣核電站穩壓器水位控制系統的核心部分是由15塊模擬插件組成的。本文所要講的數字化穩壓器水位控制系統則是用一塊單板機來取代這15塊模擬插件的功能,而它又能與原模擬系統兼容,也就是該裝置能嵌入原核電站模擬控制系統中工作,外部輸入輸出上并沒有變化,但其內部卻是個數字系統。
1 穩壓器水位控制系統數字化結構
數字化的穩壓器水位控制系統是在選定的數字化平臺的基礎上開發實現的,數字化的穩壓器水位控制系統的結構如圖1所示。該系統所接受的輸入變量與模擬系統一樣,有一回路平均溫度Tm、參考溫度Tref、穩壓器水位測量值Lm、一回路上充流量Qc和下泄流量Qd,它們均為1~5 V的模擬變量。經過系統運算后產生2個模擬輸出變量,分別是上充流量整定值Qs和穩壓器水位設定值Lref,它們與模擬控制系統[1]一樣,接收的是1~5 V電壓信號,輸出也是1~5 V電壓信號。由于本數字化的穩壓器水位控制系統不可能與實際的受控對象對接實現對穩壓器的水位的控制,這里只能按照實際受控制對象的各個參數構造出一個與實際穩壓器很相似的數學仿真模型,讓其與該數字化的穩壓器水位控制系統對接實現動態運行。該數學模型是在LabView運行環境下得以實現的,該部分不屬于我們所討論的范圍,這里不再過多介紹。
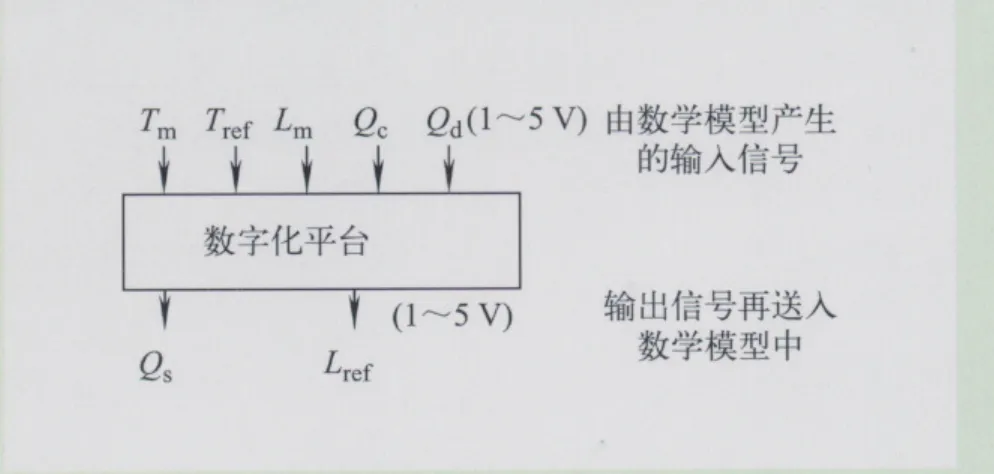
圖1 穩壓器水位控制系統功能框圖Fig. 1 The functions of pressurizer water-level control system
2 硬件支持
穩壓器水位控制系統選擇其數字化的平臺原則是:
(1)功能滿足要求;
(2)可進行二次開發;
(3)可靠性高,性能好,費用低。
為保證可靠性,對國內外大量成熟的商用單板機進行調研,選擇的單板機必須已具有2~3年的使用經驗、并有相當數量的用戶。能滿足這兩個條件的產品和它的供應商應該說已具備了較好的業績。
綜合各方面因素,采購選取的是美國Digi國際有限公司屬下的Rabbit公司開發的以RCM3000微處理器為核心的BL2600單板機,它是一款高性能、可擴展、可以具有多種配置的嵌入式控制器。如圖2給出嵌入式平臺內部的基于Rabbit3000的各個子系統。

圖2 嵌入式平臺基于Rabbit3000的結構Fig. 2 Embedded platform based on Rabbit 3000 structure
BL2600單板機基于強大的Rabbit3000處理器,配有Flash和SRAM,帶有開關量輸入/輸出、模擬量輸入/輸出、RS-232/RS-485和10/100Base-T,并可以選配串行Flash、xD卡,提供了較高密度的I/O,該產品的支持語言是一種改進的C語言開發系統(動態C,Dynamic C)。
3 軟件設計
數字化的穩壓器水位控制系統的程序包括BL2600單板機初始化程序、時間延遲子程序和控制算法程序,軟件流程如圖3所示。
(1)初始化程序:包括對板件的初始化和對A/D、D/A以及IO各個通道的初始化。

圖3 軟件流程序圖Fig.3 Software flow chart
(2)時間延遲子程序:是為滿足程序運行時間的需求而存在的。系統要求的采樣間隔為100 ms,而程序運行一次時間不足100 ms,所以為了使系統的采樣間隔能達到這個時間設定值,就需要在程序里加入一個時間延遲子程序。后面所講到的為了讓控制程序和穩壓器水位仿真模型能更好地配合,也引入了該時間延遲子程序,其目的是讓控制系統等待數字開關的動作,如果數字開關量為0,就不運行控制系統的程序,而是一直在執行該時間延遲子程序,使這個控制器不作用,一直在空跑。
(3)控制算法程序:控制算法程序完全按照圖4所示的原理圖[2]進行編寫的,其中每一個圓圈代表一個板件,用阿拉伯數字進行編號。輸入/輸出信號在前面已經介紹過。
模擬穩壓器水位控制系統是由15塊模擬板件構成的,而這15塊板件實際只有5種類型,每種類型都可設定不同的參數,以一定的控制原則相連接構成該模擬穩壓器水位控制系統。圖4所示的插件分別介紹如何將這5類插件的功能和參數寫成C語言。
3.1 濾波器
這類插件在系統中有對信號進行低通濾波的功能,如圖4中插件1就屬于這類插件。
低通濾波器傳遞函數

其中,X表示輸入;Y表示輸出;T表示時間常數。經計算該低通濾波器的差分方程

其中,Δt取0.1 s;Yn?1是上一次的輸出信號;Yn是輸出信號;時間常數T可根據需求設定不同值。
3.2 函數發生器
函數發生器可將1~5 V輸入信號按
形式,以5線段逼近的方法產生1~5 V或4~20 mA的輸出信號,圖4中插件2就屬于這類插件,圖5所示為該類插件的函數關系。
ykxb= +

圖4 穩壓器水位控制原理圖Fig. 4 Principle of pressurizer water-level control

圖5 水位整定值和平均溫度的函數關系Fig. 5 The function between the water-level set point and the average temperature
3.3 加法器
這類插件在系統中可對輸入信號進行加、減和求平均運算,圖4中插件3就屬于這類插件。
3.4 高值選擇器
該類插件可以裝有產生可調閥值電壓和濾波輸入信號的任選電路板,輸入3個1~5 V信號,插件就會輸出最高值的信號,圖4中插件7就屬于這類插件。
3.5 PI調節插件
該類插件在該系統中可實現比例積分功能,比例積分函數關系式

第n類插件所對應的差分方程

其中,Dt取0.1 s;Xn-是1上一次的輸入信號;Xn是 輸入信號;Yn-1是上一次的輸出信號;Yn是輸出信號;k是比例系數;時間常數T可根據需求設定不同的值,圖4中插件13就屬于這類插件。
4 系統調試及系統優化方案
4.1 系統連接
為了測試和驗證該數字化的穩壓器水位控制系統的可行性及運行效果,要和模擬現場實際的受控對象(穩壓器)相連接構成閉環, 實現動態運行。該受控對象是一個運行在虛擬儀器設備上數學仿真模型,在虛擬儀器LabView的平臺上可以實時監測控制系統的狀態與參數,以圖形和圖表的形式顯示,并可以將仿真數據存儲在一個特定的文件夾中以便隨時調用。數字化的穩壓器水位控制系統的系統連接圖如圖6所示。
4.2 系統運行

圖6 數字化的穩壓器水位控制系統的系統連接圖Fig. 6 System connection for the water level control system of digitized pressurizer
將系統建立起來后同時運行數字化的穩壓器水位控制系統和裝有數學仿真模型的LabView程序,其“嵌入式”系統的運行情況通過LabView對話框可以清楚地觀察得到。如圖7所示仿真結果是初始功率是100%加入-10%擾動后7 min的運行效果圖,其中,上面的第一個圖為水位的實際值Lm與水位的理論值Lref的圖形對比情況,可以看到實際水位跟隨水位的理論值,也就是說控制系統起到了控制的目的;第二幅圖是壓力與溫度的關系;第三幅圖是上充流量Qc和下泄流量Qd與上沖流量整定值Qs之間的關系,可以看出上沖流量可以很好地跟隨上沖流量整定值的變化而變化,最終二者能達到平衡,這也說明了該數字化的穩壓器水位控制系統可以達到控制的目的。但從仿真的效果上看,仿真的結果并不是很理想,可以明顯地看到從控制系統里產生的兩個輸出量進入到LabView程序中顯示時,線條很粗,而且初始的幾秒鐘內仿真線條有跳變。現對系統的優化方案進行介紹。
4.3 系統優化方案確定
將系統建立起來運行時,實際水位Lm能時刻跟隨水位整定值Lref的變化趨勢而變化,上沖流量Qs的變化趨勢也是正常的,說明該系統能達到控制水位的目的。只是仿真圖的曲線很粗,有很多干擾,還有一點就是人/機界面程序和穩壓器水位控制程序在運行時由于人為因素導致仿真圖形在開始時有一個短時間的階躍信號產生。下面針對這兩個問題對系統進行優化。
問題一:仿真曲線粗糙的問題
經過一些試驗排除了電源和地線因素干擾的可能性,確定是BL2600多路轉換器的原因導致仿真曲線不是很光滑。由于系統有5個輸入信號,兩個輸出信號,由多路轉換器導致的干擾是必然存在的,因此想到用軟件的方法來解決這種問題。

圖7 初始功率為100%加入-10%的擾動后的仿真結果Fig. 7 Simulation results of 100% initial power plus -10% disturbance
首先對A/D轉換的8個通道進行考查(如表1所示),從對每個通道1~5 V輸入信號的數據和轉換后的數據對比中發現,這8個通道相互之間有不一致性,同一通道又有非線性。同時又對D/A轉換的8個通道進行考查發現也具有同樣的特性。根據這一特點,想到用兩種軟件的方法來解決,一種方法是曲線擬合的方法,但擬合后再測這8個通道1~5 V的數據發現擬合后的效果并不明顯。

表1 8個通道A/D轉換數據對比Table 1 Comparison of A/D conversion data of 8 channels
另一種方法是折線逼近法。對A/D和D/A的每一個轉換通道都進行折線逼近法,圖8所示A/D通道校正對比原理圖。

圖8 A/D通道校正對比原理圖Fig. 8 Schematic of A/D channel colibration comparison
其中,AI指輸入的電壓量,DO指經A/D轉換后的數字量,DO′指校正后的數字量,那么通道校正的轉換關系式如式(5)所示。

其中,AIj、AIj?1和DOj、DOj?1是指對A/D轉換通道進行測量時記錄的輸入電壓和輸出數字量。
圖9表示D/A通道校正對比原理圖。

圖9 D/A通道校正對比原理圖Fig. 9 Schematic of D/A channel calibration comparison
其中,DI指待轉換數字量,DI′ 指校正后的數字量,AO指經D/A轉換后的電壓量,那么通道校正的轉換關系式如式(6)所示。

其中,DIj、DIj?1和AOj、AOj?1是指對D/A轉換通道進行測量時記錄的輸入數字量和輸出電壓量。
用這種方法校正,只要在1~5 V的范圍內取樣點數越多,最后逼近的效果越好。
問題二:數字接口問題
從仿真圖里還可以明顯看到另一種現象,就是系統的兩個輸出量Lref和Qs在開始的一段時間里并沒有顯示,而是在系統運行幾秒后才出現這兩個信號。經判斷這種現象是在開啟控制系統和人/機界面兩程序時存在時間差造成的。為了解決這個問題,將人/機界面程序引入一個數字開關量,將BL2600開啟一個數字通道。當操作員按下人/機界面上的“開始仿真”按鈕的同時,NI設備產生一個數字開關量“1”,當控制系統檢測到這個為“1”的開關量時,開啟穩壓器控制程序進行仿真。如果操作員一直沒有按“開始仿真”按鈕,那么BL2600就一直運行時間延遲子程序,不讓控制系統動作。
對該系統作了大量的優化工作后,如圖10所示,同樣是100%加入-10%的功率干擾后的運行效果,可以看到該控制系統得到了良好的優化。

圖 10 優化后100%加入-10%的功率干擾后的運行效果Fig. 10 The operation effect of 100% power plus -10%power disturbance after optimization
將以上兩個關鍵問題解決后再運行控制系統時發現該“嵌入式”控制系統不僅能達到控制的目的而且精確度很高,表2所示系統在不同功率下加入-10%功率擾動時的試驗數據及數據誤差。
在實際的運行中,系統誤差為5%時都能夠正常運行,而該“嵌入式”系統的誤差大大小于系統允許誤差,可以說它能更精確地控制實際水位達到水位設定值上。

表2 試驗數據Table 2 Test data
5 結論及展望
數字化的穩壓器水位控制系統的特點是采用標準化、模塊化結構,所以設計其他子系統時也可以采用同樣設計思想,即同樣的硬件結構,所不同的僅是數字化平臺內部的控制算法(軟件)不同。這一特點是本方案突出的優點,這就大大減小了開發其他子系統的難度,與其他模擬子系統配合工作時提供了很大的便利。從經濟學的角度考慮,也可以實現小投入大回報的經濟效益。
[1] 陳濟東. 大亞灣核電站系統及運行[M]. 北京: 原子能出版社,1994.
[2] 濮繼龍. 大亞灣核電站運行教程[M]. 北京: 原子能出版社, 1999.

猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年11期)2018-08-04 03:25:42
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(2017年9期)2017-09-26 03:41:45
環球時報(2017-03-30)2017-03-30 06:44:45
