雙側(cè)電傳動(dòng)履帶車輛小半徑轉(zhuǎn)向控制策略
2010-05-30 09:45:20陳澤宇張承寧李軍求武小花
中國機(jī)械工程 2010年13期
關(guān)鍵詞:控制策略
陳澤宇 張承寧 李軍求 武小花
北京理工大學(xué),北京,100081
0 引言
在轉(zhuǎn)向性能方面,履帶車輛不如輪式車輛,這是履帶車輛的一個(gè)缺點(diǎn)[1],主要體現(xiàn)在轉(zhuǎn)向過程中功率需求大、平穩(wěn)性差且轉(zhuǎn)向軌跡可控性差。但是履帶車輛可以實(shí)現(xiàn)小半徑的轉(zhuǎn)向,最小轉(zhuǎn)向半徑可以小于履帶中心距的1/2,甚至可以實(shí)現(xiàn)原地轉(zhuǎn)向,而輪式車輛的最小轉(zhuǎn)向半徑則遠(yuǎn)遠(yuǎn)大于車寬,正是這一特點(diǎn),使得履帶車輛在一些農(nóng)林機(jī)械、礦山機(jī)械以及軍用領(lǐng)域中顯得更加適用[2-4],因?yàn)樗梢栽诘V山、農(nóng)田、叢林等特殊狹窄環(huán)境下進(jìn)行靈活轉(zhuǎn)向,而輪式車輛很難實(shí)現(xiàn)。
為了使履帶車輛更好地發(fā)揮這一優(yōu)勢,并且在電傳動(dòng)履帶車輛[5]上得以應(yīng)用,本文針對雙側(cè)電傳動(dòng)履帶車輛,進(jìn)行理論分析和系統(tǒng)仿真,對小半徑轉(zhuǎn)向特性和控制策略展開研究。
1 雙側(cè)電傳動(dòng)履帶車輛結(jié)構(gòu)
電傳動(dòng)是目前車輛發(fā)展的趨勢,已經(jīng)在許多領(lǐng)域引起了廣泛重視[6],本文針對雙側(cè)電傳動(dòng)履帶車輛[7]的小半徑轉(zhuǎn)向問題展開研究。雙側(cè)電傳動(dòng)結(jié)構(gòu)是目前電傳動(dòng)履帶車輛中最常用的一種結(jié)構(gòu)形式,它取消了兩側(cè)驅(qū)動(dòng)輪之間的橫向機(jī)械連接,通過綜合控制器獨(dú)立地控制兩側(cè)的電機(jī)驅(qū)動(dòng)系統(tǒng),將電能轉(zhuǎn)化為機(jī)械能驅(qū)動(dòng)兩側(cè)履帶行駛。該結(jié)構(gòu)的主要優(yōu)點(diǎn)是結(jié)構(gòu)簡單,布置靈活,便于實(shí)現(xiàn),其系統(tǒng)結(jié)構(gòu)如圖1所示。
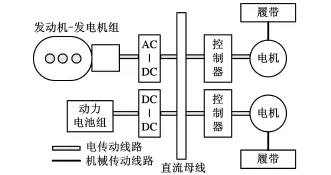
圖1 雙側(cè)電傳動(dòng)結(jié)構(gòu)簡圖
2 小半徑轉(zhuǎn)向理論
根據(jù)相對轉(zhuǎn)向半徑,可以將履帶車輛的轉(zhuǎn)向工況分為三類:小半徑轉(zhuǎn)向、再生制動(dòng)轉(zhuǎn)向和修正轉(zhuǎn)向。其中小半徑轉(zhuǎn)向是指轉(zhuǎn)向半徑不大于履帶中心距的0.5倍的轉(zhuǎn)向工況,其特點(diǎn)是兩側(cè)電機(jī)都工作在驅(qū)動(dòng)狀態(tài),外側(cè)電機(jī)正向驅(qū)動(dòng),內(nèi)側(cè)電機(jī)反向驅(qū)動(dòng),動(dòng)力學(xué)模型如圖2所示。
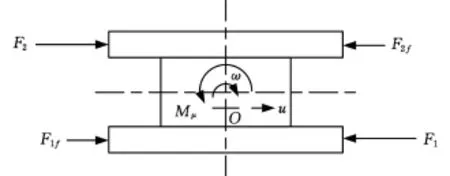
圖2 轉(zhuǎn)向受力圖
圖2 中,F2為轉(zhuǎn)向過程中外側(cè)履帶的驅(qū)動(dòng)力,N;F1為內(nèi)側(cè)履帶的驅(qū)動(dòng)力,N;F 1f與F 2f分別為內(nèi)外側(cè)履帶的滾動(dòng)阻力,N;Mμ為轉(zhuǎn)向阻力矩,N?m;ω為轉(zhuǎn)向角速度,rad/s;u為車輛縱向速度,m/s;O為轉(zhuǎn)向中心。
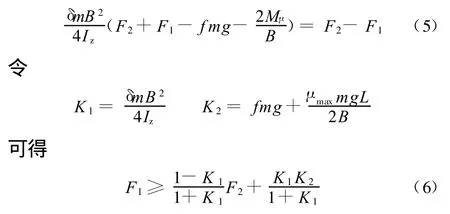
由于小半徑轉(zhuǎn)向的速度不高,因此忽略轉(zhuǎn)向時(shí)向心加速度產(chǎn)生的影響,假設(shè)履帶車輛垂直載荷均勻分布,且不計(jì)轉(zhuǎn)向過程中的滑轉(zhuǎn)、滑移,根據(jù)履帶車輛轉(zhuǎn)向動(dòng)力學(xué)[8],可建立平衡方程:
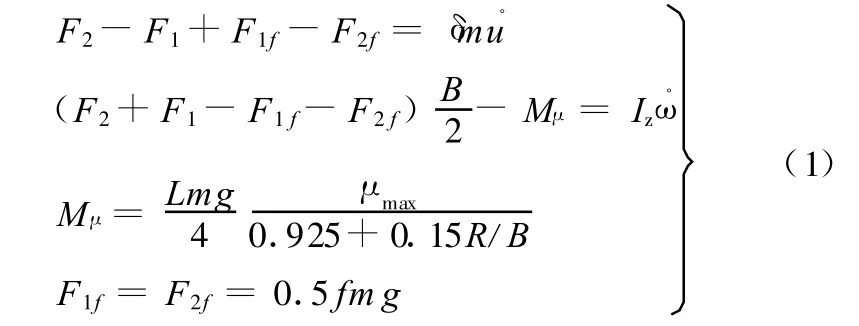
式中,m為整車質(zhì)量,kg;B為兩側(cè)履帶中心距,m;L為履帶接地長度,m;δ為旋轉(zhuǎn)質(zhì)量換算系數(shù);Iz為轉(zhuǎn)向時(shí)的整車轉(zhuǎn)動(dòng)慣量,kg?m2;g為重力加速度,m/s2;μmax為0.5B轉(zhuǎn)向時(shí)的最大轉(zhuǎn)向阻力系數(shù);R為轉(zhuǎn)向半徑,m;f為滾動(dòng)阻力因數(shù)。
如果給兩側(cè)電機(jī)固定的力矩指令,對式(1)進(jìn)行整理,可得轉(zhuǎn)向半徑為

式中,u0為轉(zhuǎn)向時(shí)的初始車速,m/s;t為積分時(shí)間,s。
對于原地起步的小半徑轉(zhuǎn)向,u0=0,根據(jù)式(1)可知Mμ為僅與轉(zhuǎn)向半徑R有關(guān)的函數(shù),分母中的積分視作被積函數(shù)原函數(shù)與積分時(shí)間的乘積,并約去分子與分母中的t,僅剩R一個(gè)變量,可知當(dāng)內(nèi)外側(cè)履帶作用力F 1和F 2一定時(shí),轉(zhuǎn)向半徑R是穩(wěn)定的值。通過迭代算法,即可得到任意F1和F2時(shí)的轉(zhuǎn)向半徑R。對式(2)進(jìn)行分析,可以得到一個(gè)結(jié)論:轉(zhuǎn)向半徑R隨(F2-F1)的增大而增大,隨(F1+F2)的增大而減小。
上述固定兩側(cè)履帶驅(qū)動(dòng)力的情況下的小半徑轉(zhuǎn)向特性,是在假設(shè)兩側(cè)履帶驅(qū)動(dòng)力不受限制的前提下得到的,但是實(shí)際上驅(qū)動(dòng)力要受地面附著和兩側(cè)電機(jī)的功率限制,而且傳動(dòng)效率也會(huì)影響兩側(cè)驅(qū)動(dòng)力,因此有必要將電機(jī)特性與車輛動(dòng)力學(xué)結(jié)合起來進(jìn)行分析。
假設(shè)轉(zhuǎn)向前的車輛初速度為0,兩組電機(jī)力矩指令輸入信號如表1所示,表1中負(fù)號表示電機(jī)反轉(zhuǎn)驅(qū)動(dòng),主要仿真參數(shù)為:m=4000kg,L=2.0m,B=1.4m,f=0.1,μmax=0.8,電機(jī)峰值功率取65k W,兩組輸入信號下的仿真結(jié)果如圖3、圖 4 所示。
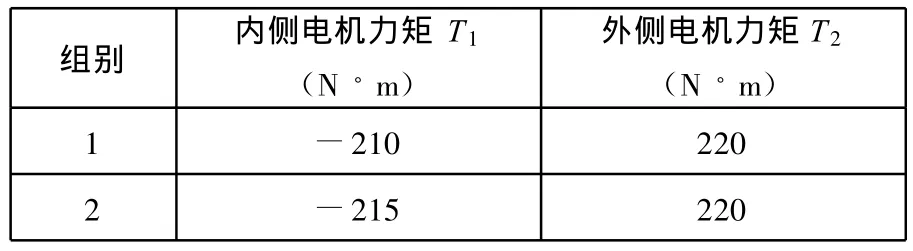
表1 電機(jī)力矩指令
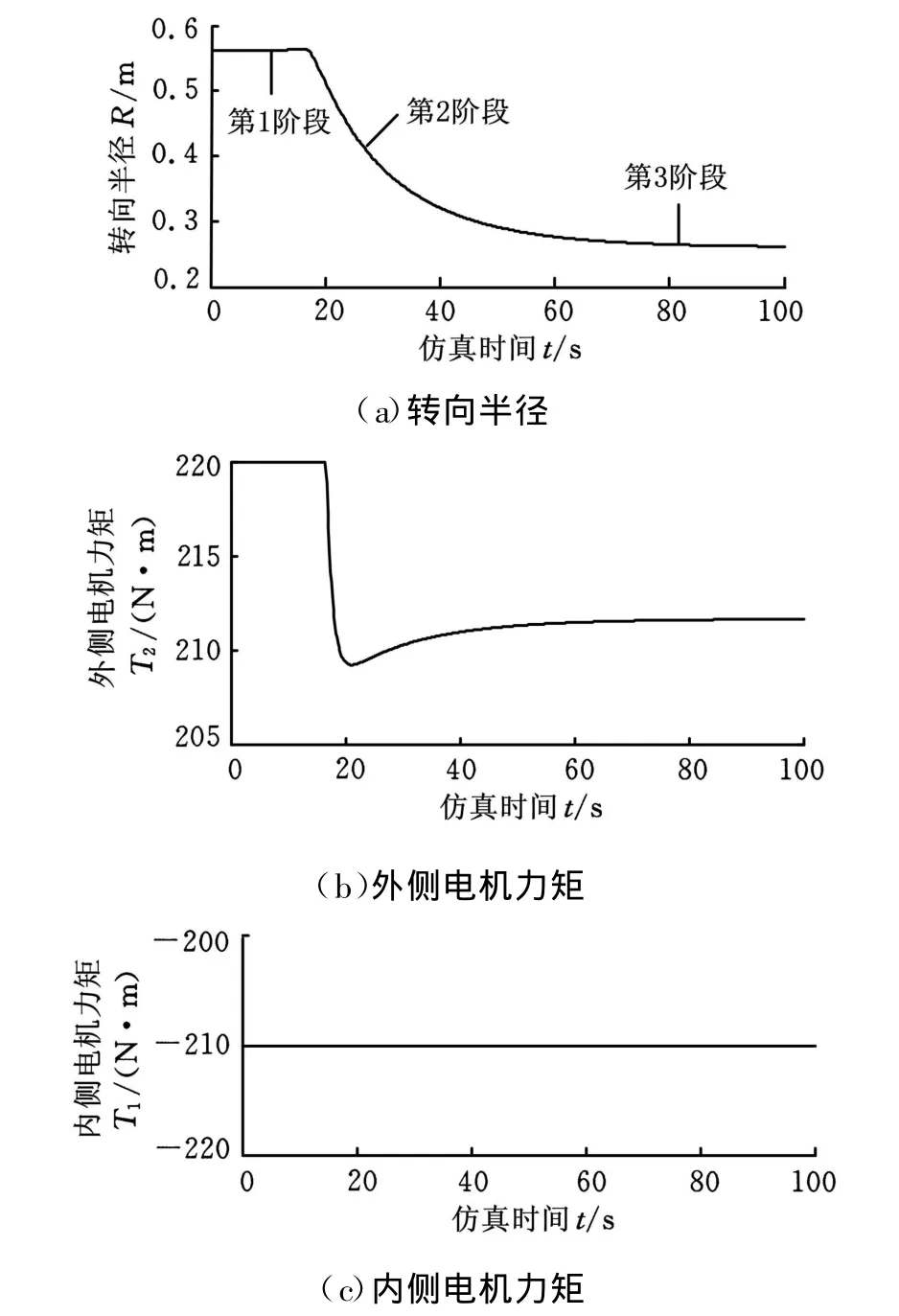
圖3 第1組力矩輸入下的仿真結(jié)果
對仿真結(jié)果進(jìn)行分析,從轉(zhuǎn)向半徑的變化可以看出,在給定兩側(cè)電機(jī)驅(qū)動(dòng)力的情況下,小半徑轉(zhuǎn)向工況分為三個(gè)階段:
第1階段:轉(zhuǎn)向半徑R是穩(wěn)定的,但是轉(zhuǎn)向角速度在迅速增加,根據(jù)轉(zhuǎn)向角速度、車速和轉(zhuǎn)向半徑的關(guān)系可知車速也在迅速增加,即此階段車輛沿固定半徑圓弧的轉(zhuǎn)向軌跡越轉(zhuǎn)越快。
第2階段:隨著速度的增加,外側(cè)電機(jī)達(dá)到峰值功率,轉(zhuǎn)向進(jìn)入第2階段,外側(cè)履帶速度繼續(xù)增加,外側(cè)電機(jī)力矩沿外特性曲線下降,轉(zhuǎn)向半徑相應(yīng)減小,車速與角速度繼續(xù)增加,但是加速度減小。
第3階段:隨著外側(cè)電機(jī)力矩的減小,內(nèi)外側(cè)履帶驅(qū)動(dòng)力逐漸達(dá)到相等,車輛重新達(dá)到平衡狀態(tài),進(jìn)入第3階段,車速和轉(zhuǎn)向角速度固定不變,轉(zhuǎn)向半徑重新達(dá)到穩(wěn)定值,轉(zhuǎn)向半徑的數(shù)值受內(nèi)側(cè)履帶的驅(qū)動(dòng)力大小而決定,在這一階段車輛沿一個(gè)固定半徑的圓弧軌跡勻速轉(zhuǎn)動(dòng)。
考慮到在行進(jìn)中進(jìn)行小半徑轉(zhuǎn)向的可能性,針對第 2組力矩輸入的情況,給定初速度為0.1m/s進(jìn)行仿真并與原地起步的仿真結(jié)果進(jìn)行對比,行進(jìn)過程中的小半徑轉(zhuǎn)向仿真如圖5所示。
通過圖4a與圖5的比較可知,行進(jìn)中的小半徑轉(zhuǎn)向與原地起步轉(zhuǎn)向相比,區(qū)別僅在第1階段,行進(jìn)中小半徑轉(zhuǎn)向的轉(zhuǎn)向半徑由無窮大逐漸降低并達(dá)到穩(wěn)定,之后的第2階段、第3階段與原地起步的小半徑轉(zhuǎn)向的變化過程完全相同。
實(shí)際轉(zhuǎn)向過程中,為了實(shí)現(xiàn)良好的轉(zhuǎn)向性能,轉(zhuǎn)向半徑必須穩(wěn)定,由上述仿真分析可知:在設(shè)計(jì)小半徑轉(zhuǎn)向策略時(shí),對于原地起步的小半徑轉(zhuǎn)向,應(yīng)該將車輛控制在轉(zhuǎn)向仿真過程的第1階段以實(shí)現(xiàn)穩(wěn)定的轉(zhuǎn)向半徑,同時(shí)進(jìn)行起步加速;而對于行進(jìn)過程中的小半徑轉(zhuǎn)向,則應(yīng)該將車輛控制在仿真過程的第3階段。
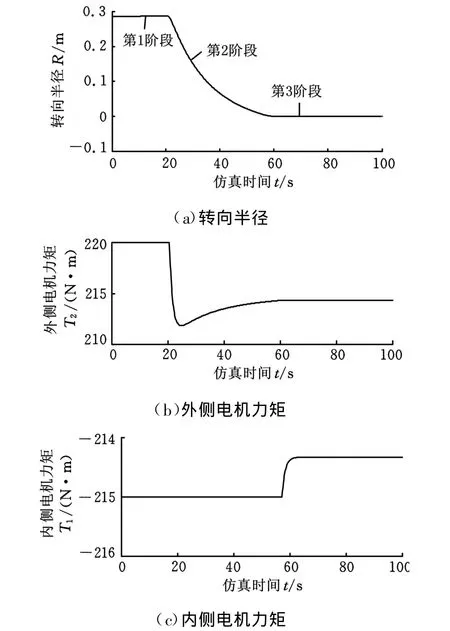
圖4 第2組力矩輸入下的仿真結(jié)果
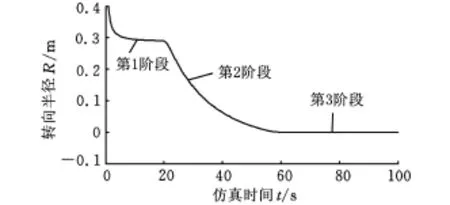
圖5 行進(jìn)過程中的小半徑轉(zhuǎn)向仿真
3 轉(zhuǎn)向控制策略設(shè)計(jì)
上述分析結(jié)果為控制策略的建立提供了理論依據(jù)。本文研究的小半徑轉(zhuǎn)向控制策略包括兩部分:一是原地起步的情況下的轉(zhuǎn)向策略;二是在帶有一個(gè)小的初速度的情況下進(jìn)行小半徑轉(zhuǎn)向的控制策略。
首先討論原地起步的情況,根據(jù)式(2),將初速度為0這一條件代入可得

由于小半徑轉(zhuǎn)向時(shí)阻力較大,因此采用的設(shè)計(jì)思路為轉(zhuǎn)向時(shí)外側(cè)履帶發(fā)揮最大力矩,通過調(diào)節(jié)內(nèi)側(cè)履帶力矩來實(shí)現(xiàn)不同的轉(zhuǎn)向半徑。在小半徑轉(zhuǎn)向模式下,最小轉(zhuǎn)向半徑為零,即原地轉(zhuǎn)向,而最大轉(zhuǎn)向半徑是0.5B,如果超出這個(gè)范圍,就不屬于小半徑轉(zhuǎn)向的討論范圍了,現(xiàn)對這兩種臨界情況加以分析。
當(dāng)R=0時(shí)對應(yīng)內(nèi)側(cè)電機(jī)力矩的最小值,結(jié)合式(3)可得內(nèi)側(cè)驅(qū)動(dòng)力上限:

當(dāng)R=0.5B時(shí)對應(yīng)內(nèi)側(cè)電機(jī)力矩最小值,結(jié)合式(3)可得
對方向盤輸入做如下解釋:定義方向盤最大轉(zhuǎn)角為±αmax,將其解釋為左右兩個(gè)方向的原地中心轉(zhuǎn)向;定義方向盤最小有效轉(zhuǎn)角為 ±αmin,并將其解釋為左右兩個(gè)方向的0.5B轉(zhuǎn)向,而對于|α|<αmin的情況,認(rèn)為是方向盤的自由行程,解釋為車輛的直線行駛。
將駕駛員方向盤轉(zhuǎn)角量化為[-50,50],其中[-5,5]的部分對應(yīng)為自由行程,原地起步的小半徑轉(zhuǎn)向控制策略可以描述為
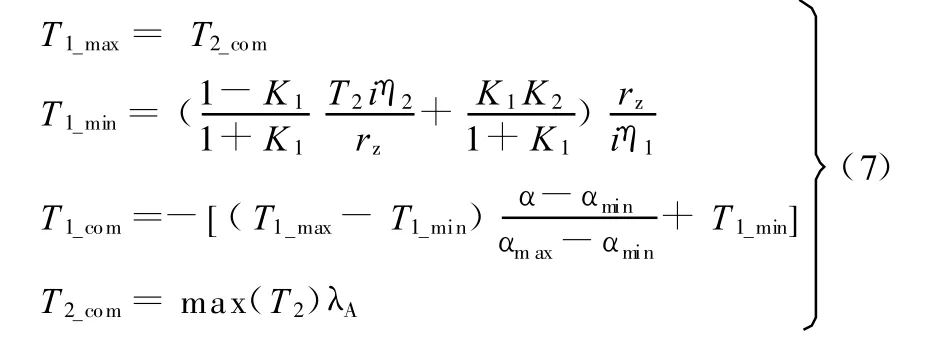
式中,T1_max、T1_min為依據(jù)式(4)~式(6)確定的內(nèi)側(cè)電機(jī)力矩上下限,N?m;rz為履帶主動(dòng)輪半徑,m;i為從電機(jī)到履帶主動(dòng)輪的傳動(dòng)比;η1、η2分別為內(nèi)外側(cè)動(dòng)力支路傳動(dòng)效率;T1_com、T2_com分別為內(nèi)外側(cè)電機(jī)的目標(biāo)力矩,N?m;λA為加速踏板信號;α為方向盤信號;αmax、αmin分別為方向盤最大轉(zhuǎn)角信號與自由行程轉(zhuǎn)角信號。
由于車輛左轉(zhuǎn)與右轉(zhuǎn)情況完全對稱,所以只討論α為正的情況,即車輛向右進(jìn)行小半徑轉(zhuǎn)向的情況。根據(jù)上述分析結(jié)果,行進(jìn)中的小半徑轉(zhuǎn)向應(yīng)該控制在轉(zhuǎn)向半徑仿真曲線的第3階段,在這個(gè)階段,轉(zhuǎn)向半徑與車速都是穩(wěn)定不變的,因此內(nèi)外側(cè)履帶作用力應(yīng)該相等,控制策略可以描述為

式中,Δu為車輛縱向加速度反饋信號,m/s2;fPID(Δu)為PID修正值,N?m,其作用是根據(jù)加速度反饋對力矩控制策略的輸出結(jié)果進(jìn)行調(diào)整。
4 系統(tǒng)仿真分析
為了對上述控制策略進(jìn)行仿真驗(yàn)證,觀察轉(zhuǎn)向的控制效果,在MATLAB/Simulink環(huán)境中建立仿真模型。該仿真模型包括5個(gè)主要組成部分:駕駛員輸入信號、控制策略仿真模型、電機(jī)驅(qū)動(dòng)系統(tǒng)模型、履帶車輛動(dòng)力學(xué)模型以及輸出顯示模塊等,如圖6所示。
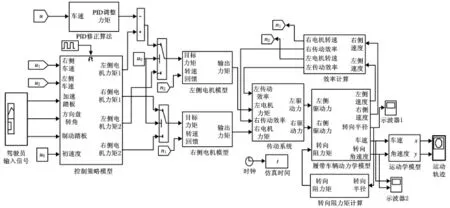
圖6 雙側(cè)電傳動(dòng)履帶車輛小半徑轉(zhuǎn)向仿真模型
控制策略模型在Simulink/Stateflow中建立,PID修正子模型如圖7所示。圖7中,Kp為比例系數(shù),K i為積分系數(shù),K d為微分系數(shù)。轉(zhuǎn)向過程中的車輛動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)仿真子模型分別如圖8、圖9所示。
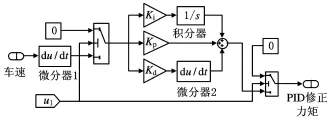
圖7 PID修正子模型
轉(zhuǎn)向運(yùn)動(dòng)學(xué)軌跡方程為
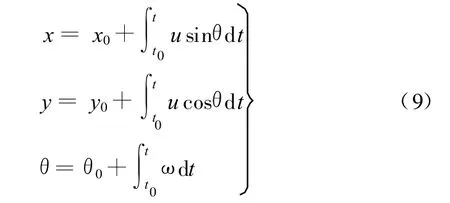
式中,x、y為坐標(biāo)值;x0、y0為初始坐標(biāo)值;t0為初始時(shí)間;θ為運(yùn)動(dòng)軌跡偏離直駛的角度,rad;θ0為θ在t0時(shí)刻的初始值,rad。
對方向盤轉(zhuǎn)角為 15°、初速度為 0.2m/s和方向盤轉(zhuǎn)角為20°、初速度為0兩種情況進(jìn)行仿真,仿真結(jié)果如圖10、圖11所示。

圖8 動(dòng)力學(xué)子模型
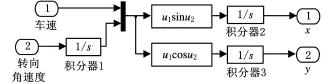
圖9 運(yùn)動(dòng)學(xué)子模型
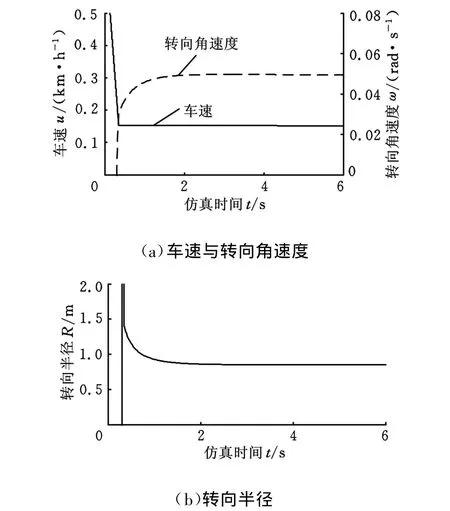
圖10 方向盤15°初速度0.2m/s的仿真結(jié)果
由圖10、圖11可以看出,帶有初速度的小半徑轉(zhuǎn)向在起始階段有一個(gè)短暫的速度下降,之后便進(jìn)入小半徑轉(zhuǎn)向階段,速度和角速度都進(jìn)入穩(wěn)態(tài),轉(zhuǎn)向半徑很快達(dá)到穩(wěn)定;而原地起步的小半徑轉(zhuǎn)向在力矩分配策略的作用下,車速和轉(zhuǎn)向角速度一起增長,轉(zhuǎn)向半徑穩(wěn)定,轉(zhuǎn)向軌跡是一條規(guī)則的圓弧。
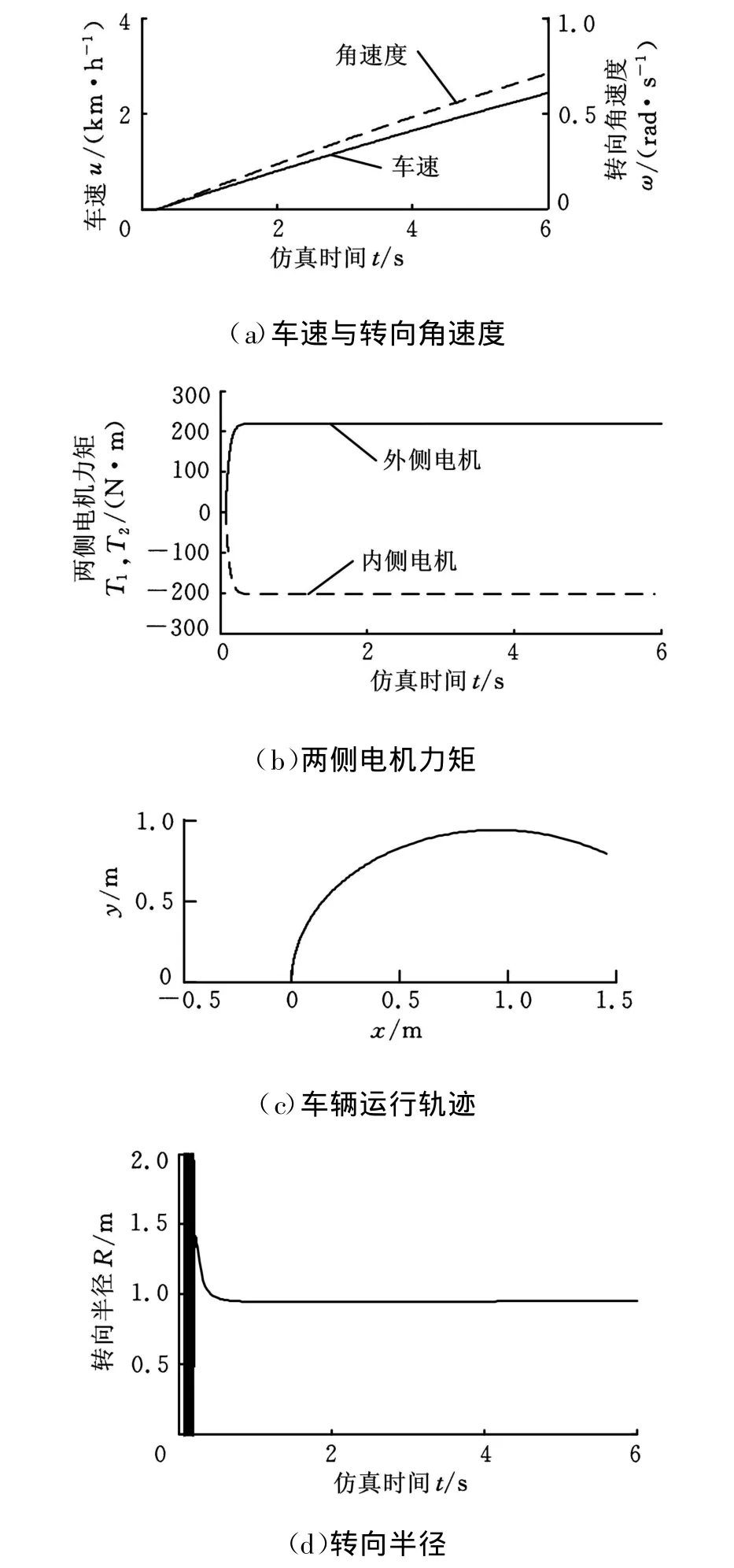
圖11 方向盤20°初速度0的仿真結(jié)果
5 結(jié)論
(1)對于原地起步的小半徑轉(zhuǎn)向工況,在兩側(cè)履帶驅(qū)動(dòng)力固定時(shí),轉(zhuǎn)向半徑是穩(wěn)定的,并且隨兩側(cè)履帶驅(qū)動(dòng)力之差的增大而增大,隨兩側(cè)履帶驅(qū)動(dòng)力之和的增大而減小。
(2)在進(jìn)行小半徑轉(zhuǎn)向時(shí),轉(zhuǎn)向特性分三個(gè)階段:第1階段,轉(zhuǎn)向開始時(shí)轉(zhuǎn)向半徑穩(wěn)定,但車速和轉(zhuǎn)向角速度迅速增加;第2階段,外側(cè)電機(jī)達(dá)到峰值功率,轉(zhuǎn)矩開始沿外特性曲線下降,這一階段轉(zhuǎn)向半徑逐漸減小,車速與轉(zhuǎn)向角速度緩慢增加;第3階段,轉(zhuǎn)向半徑再次達(dá)到穩(wěn)定,車速和轉(zhuǎn)向角速度不再變化,轉(zhuǎn)向進(jìn)入穩(wěn)態(tài)。
(3)有初速的小半徑轉(zhuǎn)向工況在轉(zhuǎn)向初期轉(zhuǎn)向半徑從無窮大迅速降低并達(dá)到穩(wěn)定值,之后的變化特性便與原地起步轉(zhuǎn)向完全相同。
(4)在仿真分析的基礎(chǔ)上,設(shè)計(jì)了小半徑轉(zhuǎn)向控制策略,分配了兩側(cè)電機(jī)的目標(biāo)力矩,并對分配結(jié)果進(jìn)行了 PID修正。通過 MATLAB/Simulink進(jìn)行了仿真,結(jié)果表明轉(zhuǎn)向策略是可行的。
[1] 汪明德,趙毓芹,祝嘉光.坦克行駛原理[M].北京:國防工業(yè)出版社,1983.
[2] 楊磊,馬彪,李和言,等.靜液驅(qū)動(dòng)履帶車輛轉(zhuǎn)矩控制方法理論研究[J].中國機(jī)械工程,2009,20(21):2-7.
[3] North Atlantic Treaty Organisation.All Electric Combat Vehicles for Future Applications[R].RTO Technical Report,2004,TR-AVT-047.
[4] 宋海軍,高連華,程軍偉.履帶車輛中心轉(zhuǎn)向模型研究[J].裝甲兵工程學(xué)院學(xué)報(bào),2007,21(2):55-58.
[5] 鄒淵,孫逢春,張承寧.電傳動(dòng)履帶車輛雙側(cè)驅(qū)動(dòng)轉(zhuǎn)矩調(diào)節(jié)控制策略[J].兵工學(xué)報(bào),2007,28(12):1409-1414.
[6] Ogorkiewicz R M.Electric Drives Take New Forms[J].Jane's International Defense Review,1999,1(1):307-310.
[7] Shafer G.Electric Drive M113 Vehicle Refurbishment Pro-ject:Sacrament Electric Transportation Consortium RA93-23program,ADA322403[R].Santa Clara:FMC Corporation,1997.
[8] 孫逢春,張承寧.裝甲車輛混合動(dòng)力電傳動(dòng)技術(shù)[M].北京:國防工業(yè)出版社,2008.
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機(jī)與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
