基于運動檢測的智能監(jiān)控系統(tǒng)的設計與實現(xiàn)
2010-06-07 02:04:46齊保謙
電視技術 2010年9期
王 瑋,齊保謙
(廣西工學院 鹿山學院,廣西 柳州 545616)
1 引言
目前,低成本、高性能、快速、智能化的視頻監(jiān)控系統(tǒng)越來越受歡迎。對一個沒有人員往來的場合,如果把所有監(jiān)控圖像都記錄下來是沒有必要的,也需要更多硬盤容量。針對這種情況,筆者設計了一種智能監(jiān)控系統(tǒng)。該系統(tǒng)只在檢測到有行人進入監(jiān)控區(qū)域時,才將采集的視頻圖像壓縮,并同時將壓縮后的視頻圖像經過網(wǎng)絡傳輸回監(jiān)控中心保存。利用該系統(tǒng)可以有效減少需要傳輸、保存的數(shù)據(jù)量,降低對網(wǎng)絡及硬盤容量的要求,而且不會錯過監(jiān)控對象。
2 系統(tǒng)工作原理及硬件組成
系統(tǒng)的總體框圖如圖1所示,系統(tǒng)的核心處理器為TMS320DM642(以下簡稱為 DM642)[1],該芯片是 TI公司C6000系列32位定點DSP,工作頻率由內部倍頻器設置,可以達到 500 MHz,600 MHz,720 MHz,可執(zhí)行指令數(shù) 4000 MI/s(兆指令/秒),4800 MI/s,5760 MI/s。DM642采用TI公司第二代增強型超長指令集,它的EMIFA接口數(shù)據(jù)可直接與大容量、低成本的SDRAM芯片無縫連接。DM642帶有3個雙通道(A,B兩通道)數(shù)字視頻口,可同時處理多路數(shù)字視頻流。因其處理性能強,外圍接口多而靈活,在機器視覺、醫(yī)學成像、網(wǎng)絡視頻監(jiān)控、數(shù)字廣播等領域得到了廣泛應用。
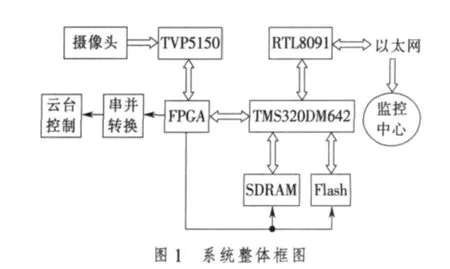
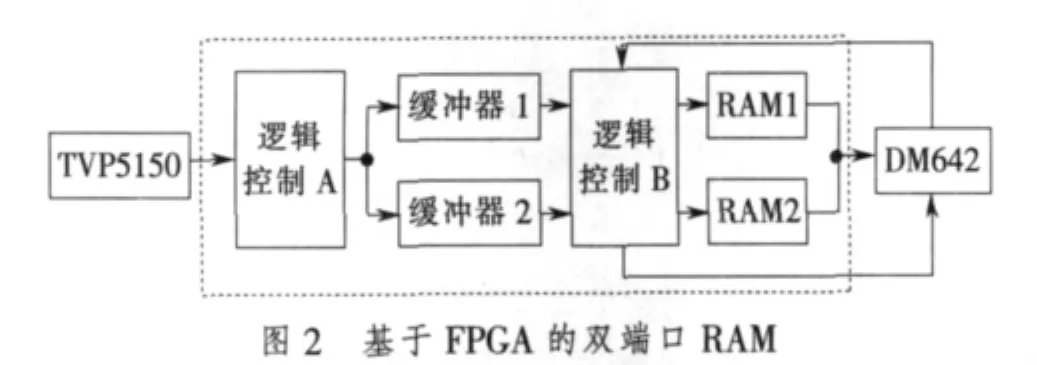
視頻解碼芯片采用TVP5150,視頻解碼芯片把攝像頭采集的復合電視信號轉換成數(shù)字視頻信號。由于在攝像頭轉動過程中,它將不采集圖像,而在攝像頭全速采集圖像時,DM642因需要完成圖像的清晰度評價、運動目標的檢測、跟蹤以及云臺控制命令的產生等一系列的處理,又可能出現(xiàn)DM642的處理速度跟不上。為了協(xié)調圖像的處理與采集,可利用FPGA內部資源構建高速雙端口RAM作為DM642的前端緩存,其內部結構如圖2的虛線框內所示。邏輯控制單元A將從視頻解碼器傳來的數(shù)據(jù)按時間段分別送到緩沖器1和緩沖器2中,邏輯控制單元B負責雙端口的讀、寫控制以及中斷信號的產生等。本設計中,采用Altera公司的CyloneIII系列產品EP3C120作為FPGA器件,同時FPGA還擔負系統(tǒng)的部分控制功能,如串口控制、存儲器控制等。
串并轉換芯片采用TI公司的TL16C752B,它把來自DM642的8位并行數(shù)據(jù)轉換為RS-485串行芯片可以使用的串行數(shù)據(jù),并借助于電平轉換芯片MAX3485構成串口電路。云臺使用RS-485(硬件層)和PELCO-D(軟件層)協(xié)議與DM642通信。DM642對數(shù)字視頻信號進行處理和運算,根據(jù)計算結果從串口輸出控制命令,控制云臺的轉動,調整攝像頭的朝向和焦距。
3 系統(tǒng)算法設計
3.1 清晰圖像的獲取
3.1.1 圖像清晰度的評價
根據(jù)清晰圖像(聚焦圖像)和模糊圖像(離焦圖像)的特點,可以借助以下幾個函數(shù)來評價圖像的清晰度[2]:
1)灰度變化函數(shù)。聚焦圖像比離焦圖像包含更多的灰度變化,這樣圖像灰度值的變化可以作為評價函數(shù)。
2)梯度函數(shù)。在圖像處理中,圖像梯度可以用來進行邊緣提取。離焦量越小,圖像邊緣越鋒利,具有很大的圖像梯度值。因此,圖像的梯度變化也可以作為評價函數(shù)。
3)圖像灰度熵函數(shù)。聚焦圖像的信息熵要大于離焦圖像的信息熵。因此,圖像的灰度熵也可以作為評價函數(shù)。
4)頻域類函數(shù)。這類函數(shù)主要基于傅里葉變換,傅里葉變換的高頻分量對應圖像邊緣,而聚焦圖像總是具有鋒利的邊緣,即包含著更多的高頻分量,這樣可以根據(jù)圖像傅里葉變換后高頻分量的多少作為評價函數(shù)。
本設計采用灰度變化函數(shù)(即灰度差分法)作為圖像清晰度的評價依據(jù),該方法形式簡單而且效果良好。它根據(jù)圖像的相鄰像素差的絕對值之和作出判斷,其函數(shù)形式為

當圖像聚焦清晰時,F(xiàn)(x,y)值最大。
3.1.2 自動聚焦的搜索算法
常用的聚焦策略有全局搜索法、分級搜索法[3]、爬山法等。
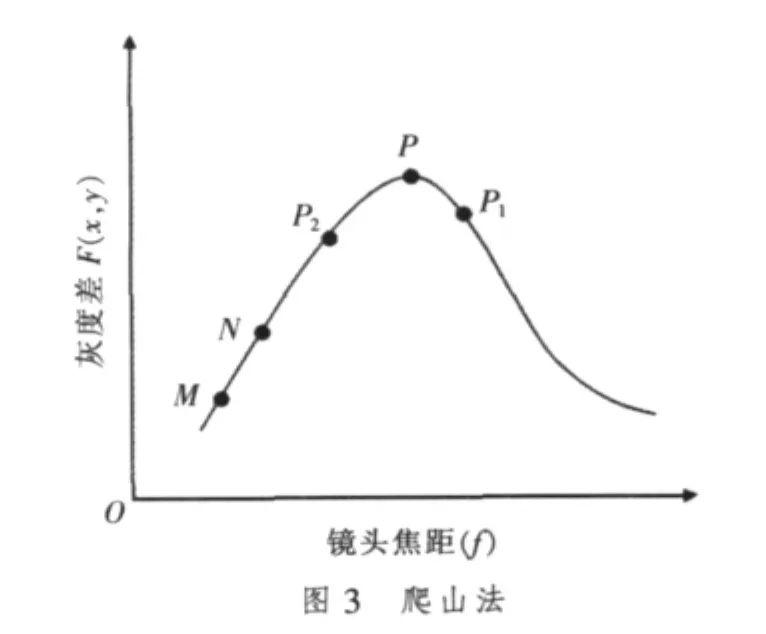
爬山法是一種應用廣泛的搜索算法。如圖3所示,首先,聚焦鏡頭作任意方向搜索,并假定從圖3的點M開始搜索,確定搜索方向,向點N方向進行,也就是點N的評價值大于點M的評價值。這時,鏡頭向頂部方向運動,直到越過頂部到達P1為止,第一次搜索結束,如圖3中的實線所示,即路徑為M-N-P1;接著由P1開始,調頭回去向頂部P運動,直到P2為止,第二次搜索結束;每搜索一次,步距相應減小;如此反復,直到找到最大值為止,聚焦結束。
全局搜索策略是對鏡頭的每個預設的焦距位置從最遠到最近進行檢測并計算其聚焦評價函數(shù)值,找出聚焦評價函數(shù)值最大的位置,然后驅動電機使鏡頭定位到聚焦函數(shù)值最大的位置。這種方法能有效克服回程定位誤差,但是本設計中攝像頭的朝向將隨運動物體的運動而改變,如攝像頭朝向每改變一次都對鏡頭的多個預設焦距位置從最遠到最近進行圖像采集,并計算其聚焦清晰度評價函數(shù)值,因此計算量大而且費時。
考慮到運動目標(行人)的速度不會太快,采集相鄰圖像對應的焦距也不會相差太大,故本設計中采用爬山法和全局搜索相結合的方法。在上電復位初始,系統(tǒng)將在每一個預設的焦距上采集圖像,并對這些圖像做清晰度評價,最后依照最清晰的圖像確定系統(tǒng)初始焦距。當攝像頭受云臺控制轉動后,因在較短的時間內,運動目標的運動路程有限,攝像頭的焦距變化也較小,可以采用爬山法再次聚焦,以減少計算,節(jié)約時間。
另外,系統(tǒng)在進行清晰度評價時只需要視頻信號中的亮度信號即可。DM642統(tǒng)計相鄰兩場圖像的亮度信號,并按照本系統(tǒng)提出的圖像清晰度評價函數(shù)對圖像進行分析、比較,并把依此作出的控制命令輸入到FPGA中。完成串并轉換后,控制數(shù)據(jù)被傳送到云臺解碼器,攝像頭的焦距得以調整。
3.1.3 光圈大小的控制
光圈大小反映了進光量的多少,體現(xiàn)在圖像上就是灰度值的大小。因此可以通過計算圖像的平均灰度值與預定的亮度值進行比較,來控制云臺對光圈進行調整,達到自動調整光圈的目的。
3.2 運動目標的檢測
對于運動目標的檢測,常用的方法有背景差值法、圖像差分法、光流分割法和模式匹配法。由于光流分割和模式匹配等方法數(shù)據(jù)計算量較大,難以滿足實時檢測的要求。背景差值法計算簡單、速度快且檢測準確,但在背景不變時才能檢測有效,不適合背景變化的場合。對于背景變化的場合,可以采用圖像差分法,即通過檢測圖像序列相鄰兩幀對應像素點之間灰度值的變化確定移動的物體。同時,視頻圖像每秒采集25幀,相鄰兩幀間隔為0.04 s,即使運動目標的移動速度達到10 m/s,相鄰兩幀間運動目標的運動距離只有0.4 m,大約為人步長一步的距離。因此,在運動目標距監(jiān)控攝像頭一定距離的前提下,運動目標不會逃出相鄰兩幀圖像。
圖像定義為 f(x,y,i),其中(x,y)為圖像的位置坐標,i為圖像幀數(shù),T 為設定的閾值,則幀 f(x,y,i)與幀f(x,y,i-1)之間的變化可用如下的二值差分圖像表示

式中,取值為1和0的像素分別對應于前景(運動目標區(qū)域)和背景(非運動區(qū)域),當非零像素總數(shù)大于閾值時,則認為發(fā)現(xiàn)運動目標。
3.3 運動目標的跟蹤
目標跟蹤算法有多種,本設計采用形心識別算法。形心,即圖像目標的幾何中心,對于準確的定位目標具有很重要意義。形心獲取通常采用形心識別算法,又稱形心跟蹤算法。當目標尺寸較小時,如果用圖像處理中的模板匹配法,那么由于所取模板與背景差異不大,目標特征不夠明顯,很容易發(fā)生偽匹配,此時,宜采用形心跟蹤法進行跟蹤和測量。對于已經二值化后的圖像,其形心計算公式為
形心跟蹤得到運動目標的坐標后,以此坐標代替運動物體,進而得出運動物體軌跡,DM642依此作出相應的控制信號,驅動云臺電機進行跟蹤[4-5]。
4 系統(tǒng)工作流程
系統(tǒng)上電復位以后首先完成FPGA芯片的配置、TVP5150初始化、DM642的啟動引導及各寄存器的設置等。從攝像頭采集到的模擬信號經解碼器TVP5150解碼以后,在FPGA的控制下被送到DM642的視頻口(VP0端口)。系統(tǒng)在檢測到有行人進入監(jiān)控區(qū)域時,啟動跟蹤、錄像功能,并把記錄下的視頻數(shù)據(jù)壓縮后傳回值班中心。
值得注意的是:系統(tǒng)工作時,攝像頭焦距的調整、運動目標的檢測與跟蹤等并不是彼此獨立的。為了跟蹤運動目標,攝像頭需要隨目標運動而運動,當攝像頭轉動以后其焦距也需要適當調整,重新采集圖像并檢測、跟蹤運動目標。系統(tǒng)工作流程如下:
1)系統(tǒng)初始化。
2)調整攝像頭焦距,在聚焦完成靜止時,連續(xù)采集兩幀清晰圖像,用相鄰幀差法按式(2)計算,檢測運動區(qū)域,并記錄圖像中非零像素(因為差分被二值化)的總數(shù)。
3)當非零像素總數(shù)大于閾值時,則認為發(fā)現(xiàn)運動目標。按式(3)計算形心并保存。否則更新當前幀并轉到步驟2)繼續(xù)執(zhí)行。
4)計算形心與圖像中心的偏差量確定要發(fā)送的云臺控制信號。如果偏差量大于閾值,則通過串口模塊發(fā)送,驅動云臺向相應的方向轉動,并同時更新背景幀與當前幀。如果偏差量小于閾值則暫不調整攝像頭的朝向,只需更新當前幀并轉到步驟2)繼續(xù)執(zhí)行。
5 實驗結果與分析
跟蹤實驗中,讓行人以慢速、常速、快走等速度進入監(jiān)控區(qū)。結果表明系統(tǒng)都能及時檢測到運動目標,并準確地跟蹤。當沒有行人進入監(jiān)控區(qū)域時,系統(tǒng)會暫停視頻圖像的壓縮、傳輸功能。
此外,實驗發(fā)現(xiàn)在多個運動目標同時出現(xiàn)在監(jiān)控區(qū)域時,尺寸較小、與背景對比度小、運動較快的目標容易被遺失,這也是筆者進一步研究的內容。
6 小結
筆者設計的智能監(jiān)控系統(tǒng),利用運動目標檢測、跟蹤方法,在提高系統(tǒng)的智能化同時,大大緩解了網(wǎng)絡的傳輸量,降低了硬盤的存儲壓力。設計中充分利用DM642的高速多媒體信號處理能力以及FPGA的邏輯控制優(yōu)勢,采用差分法來檢測運動目標,采用形心法來定位、跟蹤目標。實驗證實,系統(tǒng)反應快速,跟蹤效果良好,可用于對往來人員較少的小區(qū)進行監(jiān)控。
[1]Texas Instrument.TMS320DM642 video/imaging fixed-point digital signal processor[EB/OL].[2010-02-05].http://focus.ti.com/lit/ds/symlink/tms320642.pdf.
[2]任四剛,李見為,謝利利.基于灰度差分法的自動調焦技術[J].光電工程,2003,30(2):53-55.
[3]黃強,胡廣書.一種靈活的塊匹配搜索算法——分級搜索法[J].電視技術,2002,26(5):9-11.
[4]權立偉,石江宏,薛財鋒.IP視頻監(jiān)控系統(tǒng)中云臺控制模塊的設計與實現(xiàn)[J].電子技術應用,2006(11):86-88.
[5]楊元挺.快速反應智能安全監(jiān)控系統(tǒng)的設計與實現(xiàn)[J].電子技術應用,2009(11):18-21.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34