
復雜診斷系統的MAS協作求解方法
2010-06-11 06:30:24蔣偉進曹東波許宇暉史德嘉
電信科學 2010年10期
蔣偉進 ,曹東波 ,許宇暉 ,史德嘉
(1.武漢理工大學計算機學院 武漢 430070;2.湖南商學院計算機應用研究所 長沙 410205)
1 引言
隨著工業過程的大規模化和生產裝置的復雜化,傳統控制理論和控制技術正面臨著工業過程控制的復雜性帶來的嚴峻挑戰。復雜過程與一般工業過程有著本質區別:①關系變量眾多。復雜過程生產規模大,工藝流程長,使得過程的影響因素繁多,并且隨著檢測儀表、集散控制系統的成熟和發展,工業過程可得到的信息量越來越多,從而為過程的模型化研究帶來了難題。②過程復雜。復雜過程的診斷機理復雜,常常伴隨著物理反應、生化反應、相變反應及物質和能量的轉化與傳遞過程(固、液、氣三相共存),而且存在不同程度的非線性和時滯等特性,難以建立精確的數學模型。③過程不確定性因素復雜。復雜過程的生產環境和生產條件一般十分惡劣,如高溫、高壓、強堿,甚至是易燃易爆或存在有毒物質,導致生產過程中的一些工藝參數如溫度、流量、成份等難以實時準確檢測,并且在檢測數據中往往有大量的噪聲、干擾和誤差;還有,環境的動態變化,如生產原料成份不穩定和生產邊界條件劇烈波動等,以及一些過程重要的生產指標無法直接測量引起的過程信息未知性和不完全性等因素也造成了工業過程的不確定。④過程關聯耦合嚴重。復雜過程中含有許多相互耦合、交互作用嚴重的變量,一個操作變量的改變會同時引起多個被控變量的改變。⑤過程信息的多樣化。在實際復雜生產過程中,一方面由于自動控制系統的廣泛應用,保存了大量的實際生產數據;另一方面由于工程技術人員長期與生產過程接觸獲得了許多生產過程的經驗性知識,因此在復雜過程中包含有大量的定量、半定量和定性等多種模式的信息。
在復雜環境下,系統面對的不僅是傳統的空間分布性、慢變或時變參數等情況,而且要面對許多新的問題,如系統錯誤、子系統狀態改變、傳感器和調節器失敗、外部干擾和參數變化甚至混雜系統,工業過程再采用以往針對連續過程采用的相對簡單局部的常規控制策略已不能滿足生產過程的需要,而采用傳統的集中方式使整個控制和診斷系統異常復雜,難以實現。另一方面,控制系統的監視、控制和診斷子系統相互依賴、相互作用,是一有機的整體,存在內在的集成要求。隨著各種智能技術的發展,需要實現整個生產過程的信息集成,即把企業經營決策、管理、計劃、調度、過程優化、故障診斷、現場控制緊密聯系在一起,這對監控系統的控制與診斷系統的集成提出了更高的要求,因此我們必須研究新的、面向復雜工業生產過程的集成控制體系結構與實現技術[1,2]。
智能故障診斷模型中的“智能化”主要體現在診斷過程中結合領域知識和人工智能技術在對故障信號進行檢測與處理的基礎上進行診斷。目前研究較多的主要有4種智能故障診斷模型:基于規則的故障診斷、基于實例的故障診斷、基于模糊方法的故障診斷和基于神經網絡的故障診斷,但這些模型都存在不同的缺陷,基于此類智能技術的故障診斷已難以滿足復雜過程診斷的全部任務要求。因此,雖然已有將多種不同的智能診斷技術結合起來的混合診斷系統,如基于規則的專家系統與神經網絡結合,案例推理與神經網絡和基于規則的系統結合,模糊邏輯與神經網絡結合等。但由于這些模型固有理論基礎的局限性,許多問題如模糊邏輯與神經網絡的組合機理、組合實現算法、便于神經網絡處理的模糊知識和表達方式等也還有待研究。
Agent方法與技術研究的興起與發展,為解決上述問題提供了新的手段[3~6]。Agent是一種建立在分布式計算范例基礎上的智能手段的集成方法,其目標是為其功能實體獲得最大的利益,多Agent系統(multi agent system,MAS)通過對問題域的描述、分解和分配,構成分散的、面向特定問題相對簡單的子系統,并協調各系統并行和相互協作地進行問題求解,其思想十分適合大規模復雜問題的智能求解(problem solving)。對于一個動態的、分布的、實時的和不確定的復雜系統,多Agent系統在故障的分辨、診斷和控制方面表現出了極大的優勢。近年來許多學者對這一領域已作了深入的研究。Shahbazian等[1]設計了基于“黑板和知識庫系統”體系結構的智能診斷系統。Jennings[2]提出了將兩個孤立的專家診斷系統轉變為一個多智能體系統環境GRATE。Jennings和Draa等分別利用智能體的聯合意圖實現了聯合監控機制[3,4]。Hartvigsen[5]將多智能體技術應用于暴風雨氣象觀測和系統監測。Russell[6]利用智能體技術建立了用于復雜問題實時診斷的分布式系統MARVEC。Zhang等[7]應用智能體理論實現了雙臂協作裝配,設計出相應的開發工具和傳感、執行系統結構。Hu等[8]設計了PLMAS模塊,通過使用分布式智能體技術實現各影響因素和決策推理目標的協調。Daniel等[9]研究了智能體與黑板模型的交互形式,據此提出通用控制模型。Grosz和Kraus從高層認知狀態的觀點對多個Agent的規劃與協作進行了研究,并提出了SharedPlan的模型,其中對行動、行動的方案、能力和意圖等概念進行了刻畫[10]。J de Visser等人研究了通過集成規劃、執行、行為監控和再規劃等方法來處理不確定的快速變化的事件和狀態[11]。Subbu等人建立了一個動態環境下的多Agent協作模型,研究了以分布式共同進化算法來解決一些控制問題[12]。參考文獻[13]提出了基于多Agent和BP網絡的動態故障診斷模型,參考文獻[14]結合遺傳算法和多MAS設計了一種分布式實時任務調度算法,參考文獻[15]建立了一種Agent診斷系統結構并實現了一個原型系統。本文在上述工作的基礎上,針對復雜工業過程生產監控的特性和要求,對診斷問題任務辨識分解,各Agent的內部診斷機制,多Agent間的交互、協作及關聯模型,診斷決策問題進行研究,建立一個基于MAS的分布式智能控制和故障診斷系統。該方法依據監控信號、監控對象的結構等特征將傳統的多故障綜合診斷化為面向領域的對象的多Agent模塊診斷,診斷機制更加靈活、準確而且易于修改擴充。
2 診斷系統的MAS結構
2.1 系統的工作過程
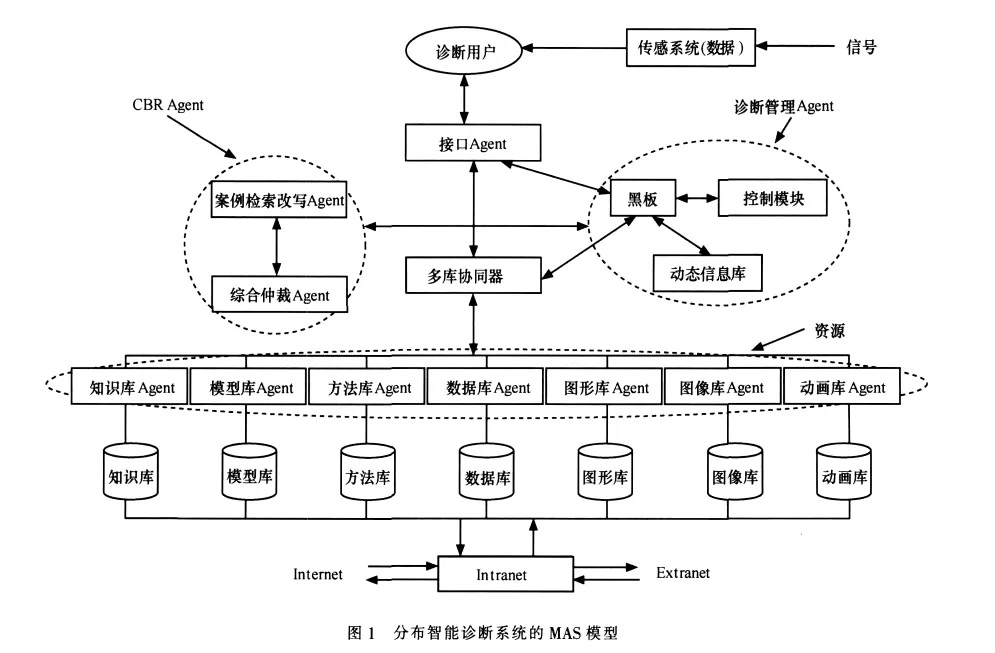
我們設計的故障診斷系統MAS結構模型如圖1所示。其工作流程為:當出現故障時,診斷用戶首先完成基于案例的故障特征抽取,通過接口Agent完成問題的描述,交給CBR Agent開始診斷分析和診斷支持。CBR Agent完成相似案例的檢索,并輔助診斷用戶把相似案例的解改寫到當前問題中,經合成形成當前問題的解建議(初始觀點),同時將問題的初始觀點發送給診斷管理Agent。此過程中,由多庫協同器調度各資源Agent,完成診斷過程所需的數據、模型、方法、圖形、圖像等的調用。診斷管理Agent收集各群體診斷成員的觀點,并提交各診斷者參考,輔助診斷用戶集成來自不同思維角度的求解設想,以便得到一些啟發,開始修正和補充初始觀點的診斷支持過程。
多庫協同器是在各庫管理系統的基礎上,對各庫進行總體控制,協調調度,相互通信,實現資源共享、協同運行的軟件系統。多庫協同器調度各資源Agent,進行診斷過程所需的數據、模型、方法、圖形、圖像等的調用。它主要完成兩方面的任務:根據診斷用戶的學習目標制定學習計劃,并執行學習計劃為診斷用戶提供所需的信息和知識。它采用目標驅動學習機制,根據不同的目標采取不同的學習策略,實現對知識庫、模型庫、方法庫、數據庫、圖形庫等的調度。多庫協同器采用多個Agent分別完成總控、協調、調度、通信等功能。
2.2 診斷Agent功能結構
診斷結構如圖2所示,采用慎思(deliberate)與反應(reaction)相結合的混合結構[13,14],Agent的基本結構分為兩個部分,一個是領域層,一個是協作控制層。在刺激反應部分中,感知器和執行器被緊密地結合在一起,Agent識別某一種情形,立即執行與這種情形相關的已經編譯好的程序,Agent在面臨相同的情形時,往往執行同樣的動作。而審慎部分通過基于模板的匹配和符合操作的邏輯推理作出決策。Agent模型由通信接口功能組(目標模塊、任務分解模塊、計劃決策模塊、執行模塊、算法和功能管理模塊)、信念知識庫、本地知識庫、數據庫、算法庫和內部功能塊組成。在不同層次有不同的輸入/輸出數據,根據通信對象使用不同協議。對于實時控制Agent,多個任務可對應于不同模型和控制算法,可根據不同情況進行多模切換。越往下層,實時性越高,以反應結構為主,反之慎思比例越大。在高層強調Agent的自主性,自主型的Agent能夠通過機器學習,或者在其運行中,與其他交互更為理性地收集信息,使其在工作的過程中知識不斷增加,能力不斷增強,具有更高的智能。整個系統強調Agent的實時性,周期地響應環境的變化,每一個Agent都有一個最終執行期限和周期使它能工作在強實時環境中。
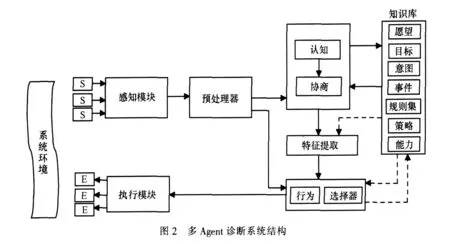
感知模塊通過一組感知器選擇性地感知外部環境,接收來自外部環境中其他Agent的信息(通知、請求等)。執行模塊將輸出信號轉化為受動器所需的格式,由受動器將信息發送到外部環境中的Agent。預處理模塊根據感知模塊所得到的任務的優先級和到來時間等特征來決定任務是通過Reactive部分(ω1類)處理,或是通過Deliberative部分(ω2類)處理,這個問題就變為一個兩類的分類問題。Agent知識庫是Agent活動的依據,也是向外界承諾的基礎。即研究如何用符號表示復雜現實世界中的Agent以及Agent如何根據各種信息對環境進行推理和決策。特征提取模塊將知識庫中的模型加以簡化,簡化的模型更加局域化,許多不相關的細節被去除。細節的相關性基于刺激反應部分當前的目標和狀態。刺激反應部分由選擇器模塊和行為模塊兩個模塊組成。選擇器模塊的工作是在前述所得到的簡化模型的基礎上得到一個高層邏輯條件來驅動行為模塊。行為模塊實際上是一個有限狀態機。審慎部分由識別模塊和協商模塊組成。Agent的審慎部分監測Agent所在環境,更新知識庫中的信念,利用規則集中的規則識別環境中發生的事件并產生執行某項動作的愿望。Agent的愿望和意圖,權衡相互沖突的各個動作。由協商模塊協商Agent的愿望和意圖。
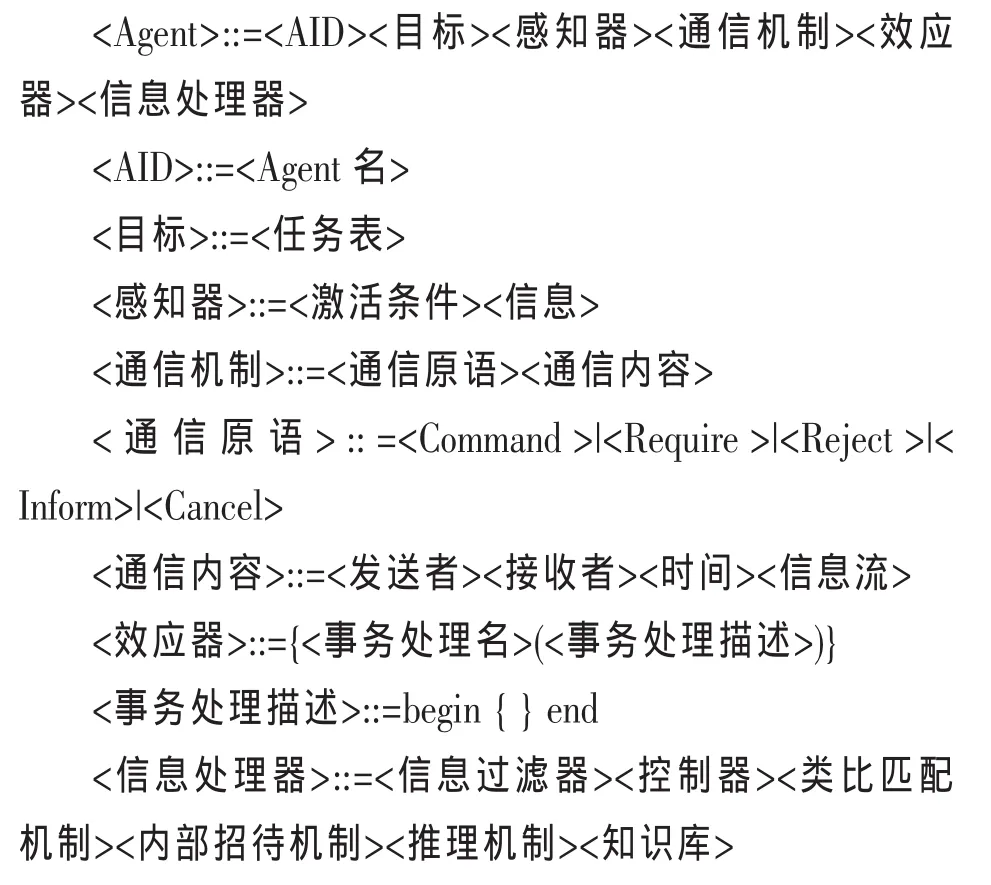
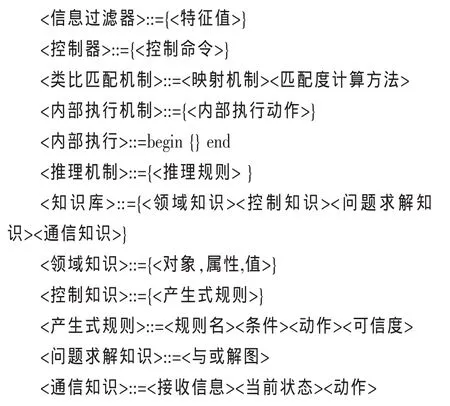
在模型的具體實現中,Agent由目標、感知器、通信機制、效應器和信息處理器等幾部分組成,有時會有些增刪。目標以任務表的形式來表示,初始由用戶靜態建立,然后通過相互通信而動態地改變;任務表中指明Agent必須做的事即可,任務的實現由效應器及與其他Agent合作的形式來完成;通信部分由通信原語及通信內容組成,用來發送任務,表達各Agent對任務的態度及傳遞被處理的信息;感知器表示Agent的感知能力,當觸發條件被滿足時,客觀存在被激活并接收外部信號/信息流;效應器的功能是執行動作行為。Agent的結構表示如下:
本模型將思考型Agent和反應型Agent兩者相結合,充分發揮了兩者的優點,使得基于該模型的系統既具有較強的靈活性和快速響應性,又具有較高的智能。
3 MAS協作方法
在MAS中,多Agent協同協作的基本目的是使參與協作的Agent各盡所能,充分利用網絡中的分布資源,因此要將協同任務進行分解,將分解后的子任務分配給合適的Agent求解,這是實現協同的一個重要問題,其關鍵技術是選擇何種任務調度算法。在網絡中,任務與資源的組合隨子任務的增加呈指數增長,在實際的協調設計中,還需兼顧到實時性,因此不能盲目搜索算法。當搜索空間過大時,不宜使用啟發式搜索方法。處理問題具有柔性和并行處理能力的遺傳算法可以在較大的狀態空間中隨機高效地采樣、搜索,很快逼近最優解,故該算法適合作為子任務分配的調度算法[15]。
按照生命周期劃分,協作過程可分為:協作任務提出、協作任務分解(將各子任務分配給各個Agent或者Agent群體)、多個Agent并行求解、各子任務集成等部分。
任務分配不僅是MAS中研究的問題,而且也是分布式問題求解中研究的問題,但由于Agent自身能力和任務復雜度等原因,使任務分解變得非常復雜。有一種在多Agent系統中基于物理學的任務分配機制,該機制減少了分配過程中的協商和通信開銷。因為在多Agent存在的環境中,如果依靠傳統方法中的協商、協調機制,將導致系統難以完成一個任務的求解。
對一個整體的協作任務進行需求遍歷,形成一棵遍歷樹或圖的結構,對于子任務的劃分,每個結點固然可以分為一個子任務,處于同一代結點應劃分為不同的子任務,以便于并行求解,而位于同一枝蔓上的結點(如父子結點)則可劃分為同一任務,但應作出標記,既有利于并行求解,也便于求解過程中的進一步交叉和選擇。任務分解也可以采取一種在競爭有限資源中的Agent之間進行任務分配的分布式市場協議系統,這種方法將分解和分配集于一體,拍賣仲裁者負責資源的拍賣,各類Agent對所需的資源進行競價。Agent以拍賣協議確定的價格進行任務和資源的交易,通過指定拍賣機制中一組簡單的競價策略,達到期望的收斂特性。
在多個Agent并行求解中我們結合遺傳算法來實現,遺傳算法適應度函數用來區分群體中個體(問題的解)的好壞。這里我們給出Agent置信度的概念。系統中,每個Agent都有自己的求解空間,具有獨立的屬性、方法和知識,容器記錄了各主體的求解過程,各主體通過容器的上下文對象聯系,每個Agent最終給出問題的求解的向量,需要一個綜合評判方法來綜合各求解結果,這樣最終的結果與各Agent的求解結果都存在一定的偏差,Agent求解結果的偏差越大,說明Agent的置信度越低,反之越高,我們用c(Agent i)表示Agent i的置信度。鑒于此,首先使用大量的訓練樣本(任務),分別由容器中各Agent完成,開始每個 Agent的 c(Agent i)相同,根據訓練結果調整c(Agent i)的值。訓練過程可以采用神經網絡算法,最終確定各Agent的置信度。鑒于遺傳算法對適應度函數的惟一要求是該函數不能為負。由于置信度本身反映的就是Agent的可靠程度,又滿足非負的要求,故我們取Agent i的適應度函數為 f(i)=c(Agent i),容器的上下文對象負責記錄各Agent的適應度函數,并在Agent的任務執行過程中,每隔時間段T,監控各Agent的資源占有情況以及執行進行度重新評估適應度函數。如果Agent i按照合同進度執行,則有:f(i)=f(i)+f(k),n為協作 Agent的數目,M為權重系數,取值根據實際情況而定,一般取M≥n;同理,如果Agent i不能得到需要資源或者任務完成進度緩慢,則調整 f(i)。f(i)=f(i)f(k)。
在多Agent協調的任務調度中,基因值為一個主體,每個染色體是一個有一定順序的列表。
假設 k 個 Agent的編號分別為 a1,a2,…,ak(k≤m)。m個任務要分配給k個Agent,要說明的是,有時幾個任務可以分配給一個Agent,所以不一定用到所有的Agent。各個任務 μi(i=1,2,…,n)所分配給各個 Agent的編號的順序排列就構成該問題的染色體編碼,即我們所用的是等長度的字符編碼方法。例如a3 a8 a1… a3 a1一共是m個,這代表一個分配方案(群體中的一個個體),表示將第1、m-1件任務分配給a3,第2、4、m件任務分配給a1,第3件任務分配給a8等。初始群體可以由a1,a2,… ak的隨機排列產生。由個體染色體編碼串可統計出某一分配方案用了多少個Agent。
多個Agent在獲得子任務后,每個ai Agent進行獨立求解,并在確定的時間間隔內定期通信和交互,然后采用選擇、交叉、變異等遺傳算子,重新分配子任務及任務的下一級,以進行求解。例如:子任務u1分配給Agent1,u1可以細分為{v1,v2,…,vi},Agent1 在解決完 vi與 Agentj通信后將下一級子任務交叉重新選擇,在這個過程中逐漸形成了適應的最優解。
下面給出MAS協調推理算法和生成一個動作的過程。
算法1 協調推理算法MAS-Co(OPS,CaS,I,G)
輸入:所有動作模塊的集合OPS,所有Agent的能力集合 CaS,當前環境狀態I,目標 G
輸出:協作行為規劃
Step 1通知所有Agent規劃開始,并等待所有Agent執行完當前動作后進入規劃狀態。
Step 2 初始化,建立初始規劃 ψ=
Step 3 調用遞歸算法 φ=Generate-Next-Step(ψ,GS),表示愿望的確定過程。包括兩方面:一是遞歸的發現更具體的愿望,即子目標的形成;二是保證愿望與信念、意圖的一致。
Step 4規劃生效。對于規劃中有其他Agent參與的動作與有其他Agent有關的約束,通知相應的Agent。表示意圖的選擇、確定過程,這里有三種可能;放棄不可達成或不相容的意圖;保持未證明不可達或不相容的意圖;加入新的意圖。
Step 5通知所有Agent規劃結束,所有Agent繼續執行自己的任務。表示Agent的執行過程。
Step 6如果成功,則返回φ,否則失敗退出。
算法2生成一個動作步驟Generate-Next-Step(ψ,GS)
輸入:當前的規劃ψ,當前的子目標集合GS
輸出:添加一個新動作步驟后的規劃φ
Step 1終止條件。如果GS為空,則算法成功,返回。
Step 2選擇子目標。從GS中選擇一個子目標
Step 3選擇動作。從已有動作集合SO中選擇一個已有動作,或者從動作模塊集合OPS中選擇一個新動作,將該動作記為H,使得堝e∈EH且 MGU(e,g)≠⊥,如果沒有符合條件的動作,那么失敗退出。
Step 4 使動作生效,令 ψ′=
SO ′=SO ∪{H},OO′=OO ∪{H 芻A},CS∪MGU(e,g),CLS′=GLS∪{
Step 5子目標生成,如果H埸SO,則對每個p∈PHCS′,向 CS’中加入
Step 6沖突的檢測與消解。將規劃中新加入的因果鏈
(a)升級。U芻A。
(b)降級。A芻E。
(c)分離。在現有自由變量上選擇約束β使得MGU(e,劭pu)≠⊥。
(d)加入修復。向 CS’中加入
Step 7約束一致性判斷,設步驟6中選擇的約束為c,調用約束一致性判斷算法Consistent(c),若返回True,說明c與 CS’一致,將 c加入到 OO’或 CS’中;若返回 False,說明c與CS’不一致,需要選擇其他約束來消解沖突。
Step 8 遞歸。調用 φ=Generate-Next-Step(ψ,GS),如果成功,返回φ,否則失敗退出。
4 MAS診斷決策機制
下面以診斷Agent內部的運行決策為例,說明決策仿真過程。
設監控客體是系統中被監控的對象,每個監控客體對應1個診斷Agent,完成對它的監控和診斷任務。
監控客體的工作狀態表示為它能夠繼續工作的可能性的量度,是其工作狀態特征值s在工作狀態語言變量上的一種模糊映射,表示為 β:s→Γ(s),其中 s為應用 Agent發生的所有故障的可信度與其權重乘積之和;Γ(s)=
監控客體間的狀態耦合是監控客體間不確定工作狀態變量的關聯度描述。
采用概率表示,設系統共分解為n個監控客體,對應n個診斷Agent,則有n種工作狀態的描述x1,x2,…,xn,第i個監控客體受其他(n-1)個監控客體的影響而獲得的工作狀態的概率置信值為pr(xi)=pr(xi|x1,x2,…,xi-1,xi+1,…,xn)。系統的總體工作狀態的描述為y,其概率置信值為pr(y)=pr(y|x1,x2,…,xn)。
4.1 Agent內部的診斷與決策
在診斷Agent內部,需要完成2個方面的工作:首先,根據實時采集到的征兆信息,診斷出監控客體可能發生的故障,并對該監控客體的工作狀態做出評估;然后,基于實時征兆信息做出操作決策。
定義3類狀態結點:征兆結點S、故障結點F及中間結點M。S是由原始數據獲取的特征信息;F表示系統中的物理構件,是診斷搜索的初始狀態、原因等;M是一種無形結點,它是聯系相關征兆結點和故障結點的橋梁。
診斷問題是在已知一組征兆S的情況下,對各種假設故障F的似然率的估計。在已知pr(F)、pr(M/F)、pr(S/M)。的情況下,診斷問題就是根據征兆結點S的信息來估計概率pr(F/S)。應用Agent的操作決策是根據可觀測征兆從控制策略中選擇適當的決策,使任意時刻監控客體狀態趨向最佳,它取決于應用Agent的故障狀態和控制策略。
4.2 應用Agent運行決策
應用Agent的運行決策建立在其負責的監控客體內部工作狀態以及其他監控客體工作狀態綜合影響作用的基礎上。由此定義2類工作狀態結點:內因引起的工作狀態結點CI和外因引起的工作狀態結點CO。整個決策過程算法如下。
(1)吸收CO的所有前序結點進CiO后,對應的計算為:

(2)刪除 CiO后,對應的計算為 E[V/D,CiI]=E[V/D,CiI,CiO]×pr(CiO)。
4.3 系統Agent全局運行決策
系統Agent的全局運行決策是基于多個應用Agent的局部運行決策所形成的決策空間,對它們進行協調處理而對整個系統做出的比較優決策。整個系統工作狀態結點C表示,系統全局決策結點D表示,整個決策過程的算法如下。
(1)吸收C的所有前序結點C后,對應的計算為:

設在各Agent評估出監控客體工作狀態的基礎上,進行換線機器人Agent內部的運行決策。
已知工作狀態結點:工作狀態={好,中,差};決策結點:決策策略={繼續運行,脫離系統}。
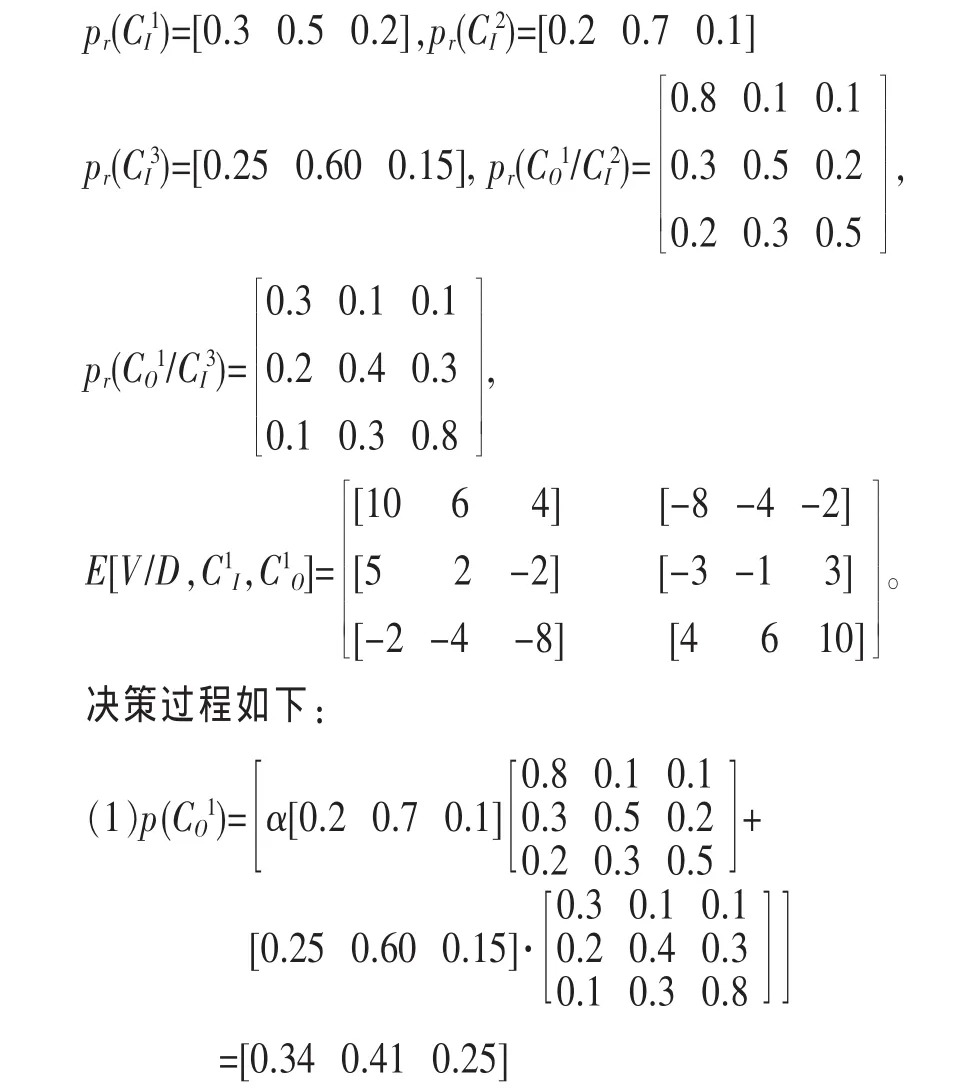
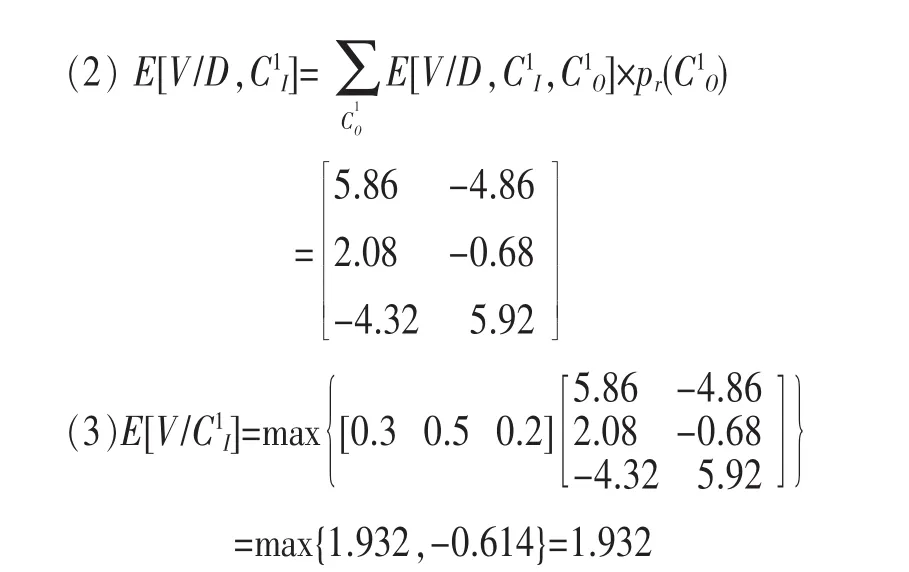
即決策策略={繼續運行,脫離系統}的效用期望值為E[V/C1I]={1.932,-0.614},所以應采用決策{繼續運行}。
5 應用分析
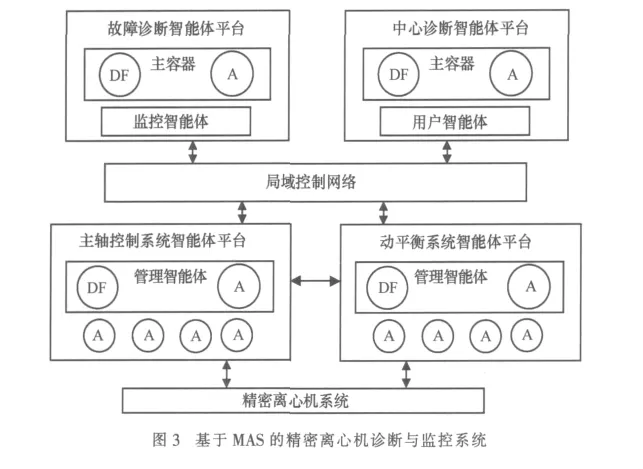
根據上述方法開發的原型系統應用于精密離心機系統,實現了精密離心機故障診斷與監控系統,如圖3所示。該系統能夠完成診斷測試任務,并達到要求的性能指標,整個系統在系統維護、實時故障診斷和監控能力上有了較大的提高。精密離心機系統屬于大型機電系統,分別由動態半徑及失準角測量系統、溫度控制系統、主軸控制系統、動平衡系統、鳥籠控制系統、中心監控系統等組成。由于目前在精密離心機中各子系統都是獨立的計算機系統并且功能相對獨立,因此,我們采用一機一MAS結構,即把每個子系統作為一個MAS,根據診斷對象和診斷功能需求,診斷智能體被設計并配置在各MAS平臺中,所有子系統最終通過100 Mbit/s網絡交換機組成了精密離心機多智能體故障診斷與監控系統。
精密離心機工作在高速旋轉狀態,為了人員和設備的安全,整個離心機被放在密閉的鋼結構的保護罩中,中心監控智能體平臺和故障診斷Agent平臺上的用戶智能體就可以實現對上述各子系統的遠程控制,發送控制指令。用戶可以通過用戶智能體提出的新的診斷任務傳送給監控智能體,然后經過任務分解,發送到診斷智能體去執行。監控智能體把最終診斷結果通過用戶智能體以圖形界面形式,直觀地顯示給用戶。
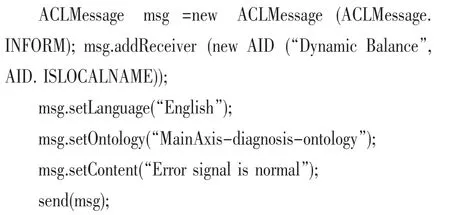
診斷智能體的運作流程為:該診斷智能體具有某個初始內部功能狀態f0(f0∈F),在某時刻,診斷智能體通過觀察外部環境得到視覺狀態see(si)(si∈S),它將該視覺狀態結合此時的功能狀態f0進行思考和推理,從而修正功能狀態得到diagnosis(f0.see(si)),然后根據該修正后的功能狀態決定診斷對象期望達到的目標的最終狀態模式result(diagnosis(f0.see(si)))。當一個智能體向另一個智能體發送消息時,首先定義一個ACLMessage對象msg,然后賦值,最后調用Agent類的send()方法。下面代碼說明了主軸診斷智能體向動平衡智能體發送一條關于控制誤差信號的診斷結果的消息。
實驗時,人為設置了3種不同類型故障進行模擬實驗,即轉子不平衡、轉子不對中及轉子零件松動,再加入設備無故障情形,共4種模式。通過速度和加速度傳感器,分別測試轉子在各種故障狀況下的參數值,利用梯形函數,得到各故障模式特征值的隸屬函數,進一步計算出每種傳感器對各故障模式的信度函數值分配(各故障模式為真的可信程度),如表1所示,具體的信號處理過程見參考文獻[7]。對此數據利用模糊融合診斷Agent[8]和本文的融合診斷Agent,分別進行診斷處理,利用最大信度函數原則判斷故障類型,結果見1。其中,模糊融合時兩種傳感器的權重各為0.5。
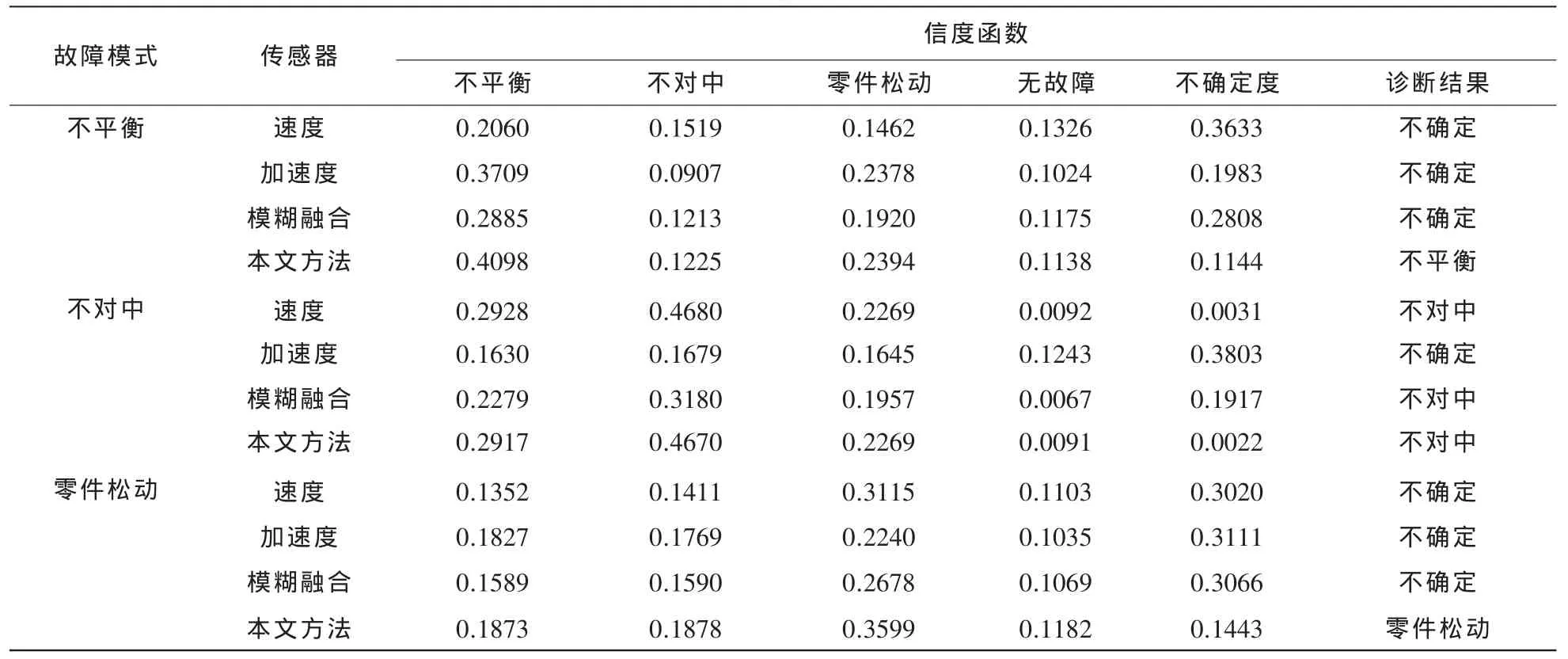
表1 診斷Agent實驗結果
對表1可以從兩方面分析其含義:①多傳感器融合診斷與單傳感器診斷相比故障診斷準確率明顯提高,這主要是融合后實際故障的信度函數值明顯增大,特別是本文Agent診斷方法;②模糊融合診斷Agent和本文診斷Agent,在有些情況下診斷結果是一致的,如轉子不對中,此時可直接得出轉子不對中的故障模式,并將數據傳送給管理Agent,輸出診斷結果。在另一些情況下,診斷結果是不一致的,如不平衡和零件松動故障,此時將兩者的診斷數據全部傳送給管理Agent,綜合仲裁Agent會根據不同情形作出不同處理,對此種模糊Agent結果為 “不確定”,而本文Agent能識別故障模式的情況,選取本文 Agent結論為診斷結果輸出。如果兩種診斷相互矛盾,綜合仲裁Agent則需向其他診斷Agent發出協作診斷請求,并提出原始的數據,最后綜合所有診斷Agent的結果,作出最終結論,達到Agent協作診斷的目的。
6 結束語
對于動態多變環境下的復雜問題決策,如分布式故障診斷系統領域,由于因果關系復雜,而信息具有隨機性、模糊性等不確定性,其知識難以表達,因果關系難以把握等,本文在以往智能診斷方法的基礎上,應用Agent及相關智能技術,提出了一種基于多Agent系統的分布式智能診斷決策模型,該模型由多個分布于不同區域的Agent工作組成,是一個分布式遠程多Agent診斷系統,克服了傳統的基于規則推理系統的知識難于獲取和推理的脆弱性等缺陷。在精密離心機故障診斷與監控系統中,該模型能快速、準確地進行故障成因分析,給出合理的、建設性的決策意見,取得了與專家相似的診斷結果,提高了系統的安全運行效率。另外,由于采用了工業現場廣泛使用的CAN總線,因此可以很方便地應用于連續工業生產,構成大型分布式遠程故障監測與維護系統。
1 Shahbazain E,etal.Multi-agentdata fusion workstation architecture. SPIE-the International Society for Optical Engineering,1998(3376):60~68
2 Jennigngs N R,Vargs L Z,Aarnts R P.Transforming standalone expert systems into a community of cooperating agents.Engineering Application Artificial Intelligence,1993,6(4):317~331
3 JenningsN R.Controlling cooperative problem solving in industrialmultiage systemsusing jointintentions.Artificial Intelligence,1995,75(2):195~240
4 Draa B C,Millot P.A framework for cooperative work:an approach based on the intentionality.Artificial Intelligence in Engineering,1990,5(4):199~205
5 Hartvigsen G,Johansen D.Cooperation in a distributed artificial intelligence environment-the storm cast application.Engineering Application of Artificial Intelligence,1990,3(3):229~237
6 RussellS J.Provablybounded optimalagents.Journalof Artificial Intelligence Research,1995,23(2):575~609
7 Zhang J,Collani Y V.An interactive assembly by a two-arm agent.Robotic and Autonomous Systems,1999,29(12):91~100
8 Hu Wenbing,WangShaomei.Study on logisticsdecision supported system based on multi-agent.In:The 8th International Conference on Computer Supported Cooperative Work in Design,Xiamen,China,2004
9 Daniel D C.Collaborating software blackboard and multi-agent systems&the future.In:Proceedings of the International Lisp Conference,New York,October 2003
10 Grosz B J.Kraus S.Collaborative plans for complex group action.Artificial Intelligence,1996,86(2):269~357
11 De Visser J,Wieringa P A,Moss J,et al.Supporting distributed planning in a dynamic environment:an observational study in operating room management.In:Proc of the 21st European Conference on Human Decision Making and Control,Glasgow,Scotland,2002
12 Subbu R,Sanderson A C.Network based distributed planning fordesign and manufacturing.In:Proc ofthe 4th IEEE International Symposium on Assembly and Task Planning Soft Research Park,Fukuoka,Japan,2001
13 Jiang Weijin.Research on distributed diagnoses method based on MAS.ACTA Electronica Sinica,2004,32(12A):235~237
14 Jiang Weijin.Research and implementation of distributed MSP algorithm based on GA&MAS.Computer Science,2002,29(9):443~447
15 Jiang Weijin,Xu Yusheng.Research on diagnosis model distributed intelligence and keytechnique based on MAS.Journal of Control Theory&Applications,2004,20(6):231~236
16 朱孟瀟,宋志偉,蔡慶生.一個基于模擬退火的多主體模型及其應用.軟件學報,2004,15(4):537~544
17 劉貴全,陳小平,范焱等.多主體協作系統的一種形式模型.計算機學報,2001,24(5):529~535
18 劉波,李偉,羅軍舟等.網絡管理中多Agent的半在線調度算法.計算機研究與發展,2006,43(4):571~578
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
