電力推進船舶電網提高電能質量方法研究
2010-06-23 09:08:48許曉彥石晴晴
電氣技術 2010年8期
許曉彥 石晴晴
(上海海事大學物流工程學院,上海 200135)
1 船舶電力推進系統簡介
船舶電力推進已有較長的歷史,起先主要為直流系統,且主要用于潛艇,而對于運輸船舶,特別是大型船舶,電力推進系統由于初投資費用高以及運行效率低等問題而長期得不到發展。近年來,隨著交流電機與控制技術的發展,特別是電力電子變流技術的發展和吊艙式推進器的出現,使得電力推進不僅在軍用艦艇上而且在民用船舶上也得以開拓應用[1]。目前,在民用船舶方面,電力推進不僅在特種船舶(破冰船、敷纜船等),而且在運輸船舶上(客輪、化學品船和輪渡上)得到了廣泛應用。國際上僅 ABB一家制造的電力推進船舶已超過三百艘[2]。例如,由法國Alston公司建造的“瑪麗皇后二號”,其電力推進的總裝機功率達到4×21.8MW。國內在連煙線火車輪渡和海事局的海監船上也采用了電力推進系統。相比傳統的船舶推進系統,采用電力推進系統的優勢在于:推進效率高,機動性能好,機艙小、布置靈活,噪聲低、污染少,并且適合于特種船舶的應用。
目前一營運船舶的吊艙式電力推進系統如圖 1所示。

圖1 船舶電力推進系統結構圖
2 船舶電力推進系統電能質量的現狀
盡管船舶電力推進系統有多種優點,但船舶電網是一個獨立的小容量電網,故受其非線性負載的影響較大,在電能質量方面的現狀不盡人意。
如圖1所示,系統使用了大量的電力電子器件。例如,PWMIGBT變換器,適用于中低壓推進系統。它即適用于異步電機,也適用于同步電機,被用于從大型船舶的電力推進系統到風機,水泵,空壓機,側推器的調速控制。IGCT功率半導體開關技術因其在結構上的簡便性和緊湊性,以及在有效性和可靠性方面的良好性能,包括它在冷卻方面的要求較低,使其得到越來越廣泛的應用。其它還包括GTO,SIT,MCT 等[3]。
變流器是采用電力電子器件的主要設備之一。由于電力推進船舶其推進裝置電功率占電站總功率的大部分(普通運輸船舶 50%~60%,特種船舶80%~90%),所以變流器功率很大。變流器一般分為兩種:交-交變頻器和交-直-交變頻器。交-直-交變頻器在用于拖動同步電機時被證實是個有效而穩定的變流裝置。而交-交變頻器主要用于低速高轉矩場合,即大型船舶的主推進裝置。它即無儲能元件(電容或電感),也無直流環節,但它的控制較復雜,體積較大。由此可見,電力系統的諧波較為嚴重。為了消弱脈動電流,從而減少諧波電流,常常在電力推進系統的交流電力線或直流匯流排上安裝電感器,或兩者都安裝電感器。
除了電流變換器,還有多種因素造成了電力推進系統電能質量的降低。船舶電網若有大負載的合閘,將使多臺發電機并聯運行,而發電機在投入并聯運行時的次瞬態電抗(Xd″)對諧波的影響較大。例如,當Xd″為10%時,總諧波畸變為11%;當Xd″為15%時,總諧波畸變達到15%[4]。
圖2和圖3均為對上海海事大學的一個推進電機容量為1.1kW的船舶電力推進物理仿真系統中推進電機變壓器在空載時的電壓的測量結果。圖2所示為在 12Hz供電頻率下推進電機變壓器原副邊的線電壓波形。表 1列出了在 12Hz供電頻率下雙繞組六相推進電機中所測得的線電壓直流分量,基波分量和2至50次諧波電壓。在該仿真系統供電電壓的頻率范圍從1.5Hz到15Hz。根據所測得的數據,其THDF值(總諧波畸變占基波的百分比)和THDR值(總諧波畸變占電壓有效值的百分比)均較大,如式(1)和式(2)所示,根據我國船級社5%的限值規定和英國勞氏船級社 8%的限值規定,均已超標。另外,即使在高次諧波,如 28次,30次,31次,33次,45次和47次諧波,其電壓幅值仍相對較大。

圖2 推進電機變壓器原副邊的線電壓波形

圖3 推進電機線電壓的直流分量,
基波分量和2至50次諧波電壓的測量值

3 船舶電力推進系統常用電能質量改善方案
電力系統是船舶系統中一個極為重要的組成部分,因為它對船舶的各個系統均有牽連,直接影響著船舶運行的安全性與經濟性,故船舶環境下電磁兼容問題是較受重視的。對于使用電力推進系統的船舶,電能質量問題顯得尤為重要。我國船級社業對此作了相應的規范規定[5]。而在電力推進系統中為減少諧波所使用的方法中最常規的是采用 12波頭靜止變流器,有時也采用有源電力濾波器。
增加變流器的波頭數被認為是減少電流諧波含量的最有效的方法之一,而12波頭靜止變流器的設計來源于在直流供電中廣泛應用的 12波頭可控整流電源。它包含兩套三相全控電橋,其副邊分別接成星型和三角形。12波頭可控整流電源的優點在于效率高,并能進行兆瓦級供電。由于變壓器的裂相作用,兩個電橋的輸出具有30度的相位移,從而使這種整流裝置的供電相比當時的其它類型的供電,諧波含量大為減少。對于一個中壓船舶電網,例如6600V電網,12波頭靜止變流器的實際的諧波畸變值一般為8%到9%。圖4為一個西門子公司設計的船用12波頭靜止變流器的結構圖[6]。

圖4 12波頭靜止變流器的結構圖
傳統的柴油機船舶電網一般裝置無源濾波器,而電力推進船也有采用有源濾波器。因為有源濾波器能產生與諧波電流相位相反幅值相同的電流,故即使在電網頻率發生變化時,它也能進行有效濾波。
4 船舶電力推進系統無功補償與諧波抑制新方案
對于電力推進系統采用有源濾波器,雖然起到了濾波的效果,但其功率因數仍然偏低。為了提高電網供電的效率,也為了使發電機的體積更為精簡,需要同時提高電網的功率因數。因此,本文設計了一種用于船舶電網抑制諧波和提高功率因數的新型電路,即混合有源功率因數校正與濾波電路,如圖5所示。

圖5 混合有源功率因數校正與濾波電路
因有源功率因數校正電路能在不同頻率下有效地進行功率因數校正,而電力推進系統的供電頻率又是一個較大范圍內變化的頻率,故在本文所設計的混合電路中采用有源功率因數校正電路。
相比常規船舶,船舶電力推進系統的電網容量要大得多,故采用與并聯無源濾波器相結合的串聯有源濾波器,而不是并聯有源濾波器。即由并聯無源濾波器承擔主要的濾波功能,而串聯有源濾波器本質上相當于一個諧波隔離器,而不是諧波抑制器,這樣,有源濾波器的功率就可以設置得較小。也就是說,用于船舶電力推進系統的有源濾波器的容量可以比較小。與并聯有源濾波器相比,串聯有源濾波器相當于電網和負載之間的一個高效的受控電阻[7]。基于上述理由,與并聯無源濾波器相結合的串聯有源濾波器比并聯有源濾波器更適合于船舶電力推進系統的諧波抑制。
5 仿真實驗結果
本文針對無源濾波器,串聯有源濾波器,有源功率因數校正電路建立了仿真模型,即對所設計的混合有源功率因數校正與濾波電路進行了仿真實驗。實驗系統在設計諧波抑制系統的過程中,對于無源濾波器主要研究其參數計算法;而對于串聯有源濾波器和有源功率因數校正電路,則主要研究其控制系統的設計。為提高系統的運行效率,對于串聯有源濾波器的控制系統,采用基于瞬時無功功率理論的諧波檢測方法;而對于有源功率因數校正電路的控制系統,則采用基于瞬時值比較方式的電流跟蹤控制法。其運行特性如圖6和圖7所示,其中,圖6是負載側電網電壓和負載電流波形,圖7為串聯混合型APF與APFCC系統的運行結果圖。

圖6 負載側電網電壓和負載電流波形
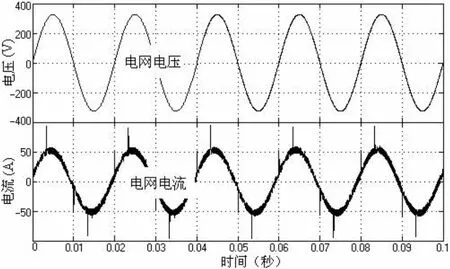
圖7 串聯混合型APF與APFCC系統運行結果
6 結論
該電路的設計將主動式解決問題的方法和被動式解決問題的方法結合在一起,互相補充,能夠共同擔負起抑制諧波和提高功率因數的任務,從而在快速性和準確性方面滿足船舶電網的要求。仿真研究結果證明該電路在改善電網電能質量方面的效果較理想,技術路線可行。預計本文所設計的這種有源與無源相結合,主動與被動相結合的混合有源功率因數校正與濾波電路,應用于船舶電力推進系統,可以有效地抑制諧波,提高功率因數,因而可以獲得可觀的節能效益。
目前,船舶正朝著大型、節能、高效和環保的方向發展,而我國正處在從造船大國向造船強國的發展過程之中,上述的成果也符合我國關于實現“綠色船舶工程”的方針政策。可見,在該研究過程中所獲得的成果對船舶電力系統的設計具有現實參考意義。另外,這個方面的研究也為其它具有復雜運行工況的有限獨立電氣系統(如醫院,采礦廠等)設計改善諧波污染,提高功率因數的方案提供一條新的技術路線,具有應用前景。
[1]李杰仁.2003年度船舶電工技術進展[J].船電通訊,2003(99)∶ 7-12.
[2]“Electric Propulsion Offers the New Way Forward,”Marine Propulsion International – ABB Technical Report, 2002.9-10.
[3]孫詩南. 艦船電力推進的新進展[J]. 船電通訊,2004(103)∶4-6.
[4]Xu Xiaoyan, Li Jieren. Simulation research of marine electric propulsion system. Proc. 2003 International Marine Electrotechnology Conf. and Exhibition,Shanghai, China, 2003, 130-136.
[5]中國船級社. 鋼質海船入級與建造規范(第 4分冊).北京∶人民交通出版社, 2001.9.
[6]“Simar Drive–Advanced Diesel-electric Propulsion Systems,” Technical Report of Marine Solutions of Industrial Solutions and Services, Siemens AG,Hamburg, Germany, 2003.
[7]王軍華, 李建貴, 汪友華. 混合有源電力濾波器研究現狀與發展趨勢[J]. 電氣傳動, 2007,37(12)∶3-6.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
