無人機電磁彈射器系統仿真
2010-06-23 09:09:12劉小虎趙宏濤
電氣技術 2010年1期
劉小虎 趙宏濤 吳 峻
(國防科學技術大學機電工程與自動化學院,長沙 410073)
1 引言
電磁彈射器是一種高效的飛機起飛輔助裝置,主要由直線電機、儲能供電設備、電力變換設備和控制系統組成[1-2]。當用于彈射輕型飛機,如無人機時,可以在滿足四部分組成的前提下將文獻[1]所述的指標降低。為了檢驗所設計的電磁彈射系統方案能否達到彈射無人機的指標要求,需要建立系統模型進行仿真驗證。仿真模型考慮地越全面,仿真結果越可信。針對直線電機這一關鍵組成部分,在恒定力控制目標的指導下,有必要對其進行深層次分析,將實際因素考慮到系統模型中。
在確定無人機電磁彈射器各項技術指標的基礎上,本文建立了彈射器的模塊化系統仿真模型,并著重分析了彈射用直線永磁無刷直流電機[3]在確保恒定力控制時需要考慮的基本模型外因素。
2 系統模型的建立與分析
以美國海軍 EMALS研制任務[1]為參照,可類比得到無人機電磁彈射器的研制任務如下:
彈射本體重量:60,000kg;
彈射周期:45s;
推力波動:1.05;
一次彈射儲能:4MJ;
彈射末速度:30~60m/s;末速度偏差:-0到+1.5m/s.
其中的末速度是個取值范圍,對應不同的無人機型號。以上述指標為依據建立系統模型。
2.1 系統建模
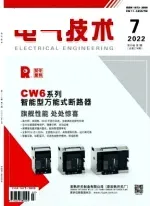
在綜合仿真軟件 Saber環境下建立電磁彈射系統模型[4],如圖 1所示。該模型由儲能供電設備、電力變換設備、直線電機和控制系統四部分組成,圖中用虛線框一一示出。
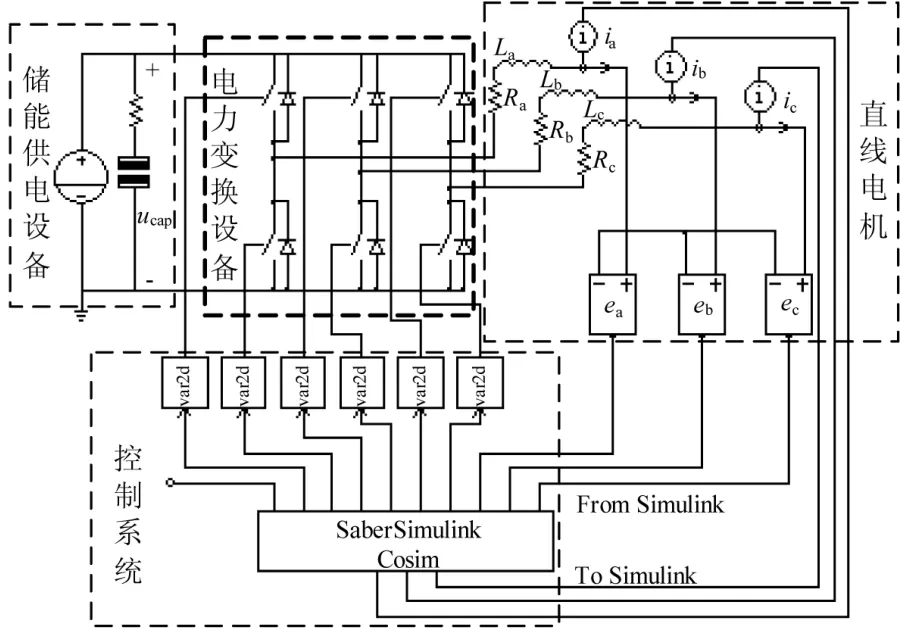
圖1 電磁彈射系統模型
儲能供電設備由代表蓄電池的直流電源和儲能用超級電容組成。蓄電池采用大容量鉛酸蓄電池,超級電容組初始電壓為600V,電容值12F,這時超級電容組的內阻約為40m?,可以通過10kA的瞬時電流。
直線電機的設計依據是文[3]提出的動磁式雙邊直線永磁無刷直流電機,結構原理圖如圖2所示。定子加速段長50m,齒寬等于槽寬等于20mm。定子線圈分段供電。每段采用電阻R、電感L和電樞反電勢e串聯來建模,三相星形連接。相關參數:R=0.0184?,L=80uH,反電勢由電機模型確定,基本模型的反電勢可由有限元仿真給出,是空載反電勢。動子采用的是NdFeB永磁體,外套薄鋁殼,氣隙2mm。極對數為2,極距為60mm。電機的深度為1m。
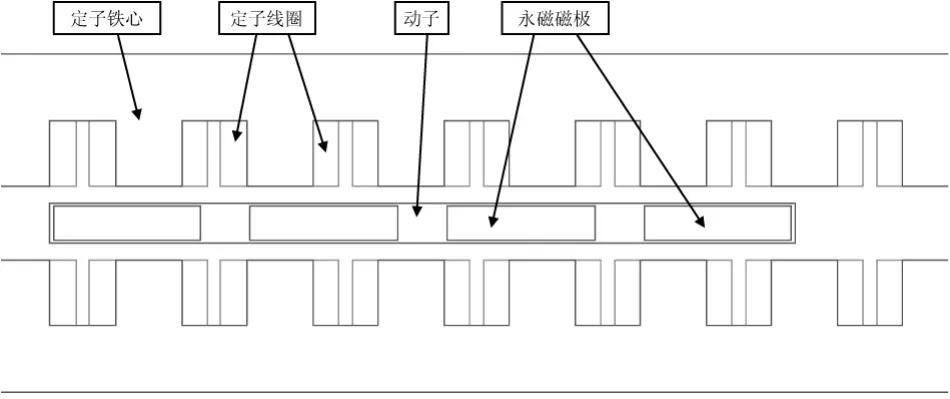
圖2 直線永磁無刷直流電機結構原理圖(頂視圖)
電力變換設備就是直線電機的換相開關,是通用的三相橋,導通方式則為常見的兩兩導通。
控制系統利用SaberSimulinkCosim模塊實現了Saber與Simulink的聯合仿真。Simulink接收Saber傳來的定子線圈電流信號,計算出動子的受力、速度、位置和電機反電勢,并給出換相開關的控制信號,送回Saber。
被彈射無人機不妨認為是直線電機動子的一部分。動子加飛機的總質量取為M=1000kg。
2.2 模型分析
為了使無人機過載盡量小,模型的核心功能應是在加速段內將無人機勻加速至要求的末速度。因此,Simulink組成的控制系統采用的是恒定力控制方法。參考文獻[5]中直流無刷電機的恒轉矩控制方法,可以得到恒定力控制方法某個工作臂的輸出電壓Vk的表示式

式中,v是動子速度,L是相電感值,ts是采樣時間,gx(x=a,b,c)是反電勢形狀函數。這樣就得到了 Vk與力偏差(F*-F)的關系,從而可算出跟蹤設定推力所需的逆變器輸出電壓。
采用了恒定力控制后的彈射器輸出推力如圖 3所示。可見平均推力基本可以維持恒定,但推力波動仍然較大,這與直線電機反電勢變形密切相關。
3 實際因素對直線電機出力的影響
在確定了電磁彈射系統模型之后,如果直線電機是理想的執行機構,則運用一定的控制策略總能實現對無人機的恒加速彈射。但是,直線永磁無刷直流電機在確保安裝簡便、推力大的同時,也帶來了反電勢變形[5]、靜態定位力[6,7]等很多問題,使恒加速彈射的目標遇到了困難,這些因素在深入建模的時候都必須加以考慮。
圖3 彈射器輸出推力
3.1 靜態定位力
如圖2所示的直線電機模型,一方面,定子鐵芯是開槽式的,另一方面,動子永磁體是開斷結構,這兩個因素造成了靜態定位力[6,7]。在推力要求較小的時候,比如彈射輕型無人機時,這類推力波動會嚴重影響彈射器輸出推力的平穩性。文[7]提出通過檢測位置對應的靜態定位力來實施前饋補償的辦法消除這種波動,是一種用控制的方法解決問題的思路。文獻[6]則直接對電機的尺寸進行優化來減小靜態定位力。但是,尺寸優化在解決這個問題的同時,又帶來了反電勢變形的問題。
3.2 反電勢變形
圖4顯示了雙邊型直線永磁無刷直流電機空載反電勢波形與極寬之間的關系。
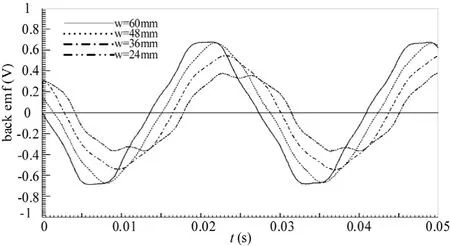
圖4 反電勢波形與極寬間的關系
文獻[6]是通過優化極寬來削弱靜態定位力的。從圖4可知,極寬的改變會嚴重影響反電勢的形狀函數。據能量守恒原理,電機動子所受電磁推力F為

可見反電勢變形對推力的影響是顯著的。不過式(1)將已知的反電勢變形考慮到了恒定力控制律中,減輕了這類影響。
但是,電機在加電運行中,由于氣隙磁場的空間和時間諧波與動子運行不同步,也會使反電勢發生變形。圖5是動子永磁體渦流導致的反電勢變形。
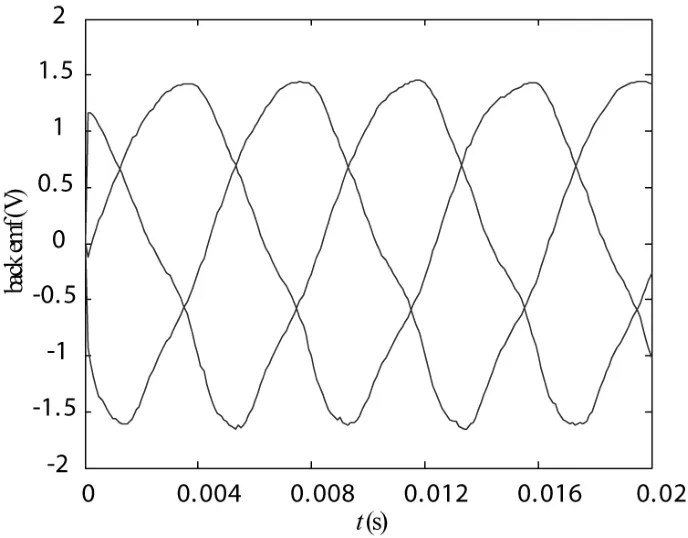
圖5 渦流致使反電勢變形
其他如電樞電流的諧波成分,換相導致的氣隙磁場瞬變等因素,都會使反電勢發生變形,從而影響彈射器輸出推力。解決這類問題的一個辦法是研究切實可行的反電勢實時檢測(觀測)技術,將其應用于式(1)中,替代反電勢形狀函數。
3.3 分段過渡
一體制造長 50多米的直線電機是不現實的,也會造成能源浪費。最好的辦法是采用文獻[8]所說的不均勻分段法,使得從分段設計階段就考慮了恒定力控制的結構問題。但段與段之間的“過渡”仍是個問題,因為動子從這一段過渡到下一段的過程中,電機的電感、反電勢等都會出現波動,隨之而來的就是力的波動。
圖6則列出了另一個在分段過渡過程中容易忽略的問題,過接縫時定位力的波動。
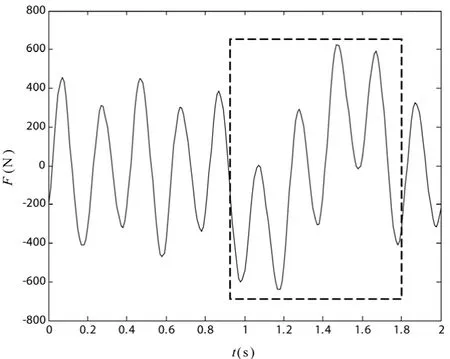
圖6 過接縫時定位力的波動
圖中的波動是由一個段間 1mm的小接縫引起的,它使得靜態定位力大幅增加。而要消除這樣的接縫干擾,必須要求電機制造精度很高,成本隨之上升。要解決這類問題,可以重新設計磁路,使磁力線對這類接縫不敏感。在電機建模的過程中,如果不考慮這些問題,就得不出符合實際的結果。
4 結論
通過對無人機電磁彈射器的系統建模,可以驗證所設計方案能否滿足指標要求。但是,實際的直線電機有諸多未建模因素影響彈射器輸出推力特性,需要詳細加以分析。這些未建模現象的影響,一般都可以通過控制或者設計的方法加以緩解甚至消除。要建立完整的無人機電磁彈射系統模型,必須將未建模項的影響和解決辦法考慮進去。
[1]Doyle M R, Samuel D J, Conway T, Klimowski R R.Electromagnetic aircraft launch system—EMALS[J].IEEE Transactions on Magnetics. 1995, 31∶ 528–533.
[2]Richard R. Bushway. Electromagnetic Aircraft Launch System Development Considerations[J]. IEEE Trans.Magnetics, 2001, 37(1)∶ 52-54.
[3]羅宏浩, 吳峻, 常文森. 新型電磁彈射器的動態性能仿真[J]. 系統仿真學報, 2006, 18(8)∶ 2285-2288.
[4]趙宏濤,吳峻. 利用超級電容供電的電磁彈射器研究[J]. 微特電機, 2009, 37(2)∶1-3.
[5]S.J. Kang, S.K. Sul. Direct Torque Control of Brushless DC Motor with Nonideal Trapezoidal Back EMF[J]. IEEE TRANS. ON POWER ELECTRONICS,1995, 10(6)∶796-802.
[6]羅宏浩,吳峻,常文森.動磁式永磁無刷直流直線電機的齒槽力最小化[J].中國電機工程學報, 2007, 27(6)∶12-16.
[7]羅宏浩, 周波, 吳峻, 常文森. 永磁無刷直流直線電機齒槽力補償控制研究[J].國防科技大學學報, 2007,29(5)∶ 117-121.
[8]Patterson D., Monti A., etc. Design and Simulation of a Permanent-Magnet Electromagnetic Aircraft Launcher[J].IEEE TRANS. ON INDUSTRY APPLICATIONS, 2005,41(2)∶ 566-575.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03