基于三次諧波電流注入的六相感應電動機仿真分析
2010-06-23 09:08:54王成元蘇啟明
電氣技術 2010年11期
王成元 蘇啟明 黃 偉
(沈陽工業大學電氣工程學院,沈陽 110870)
1 引言
與三相電動機相比,多相電動機主要具有以下優點:
(1)磁勢波形得到改善,影響較大的空間諧波次數增加,且幅值下降,轉矩脈動的幅值減小,而脈動的頻率增加,電動機的噪聲變小,系統的動態特性得到改善。
(2)轉子電流接近正弦,轉子諧波損耗減少,效率提高。
(3)三相電動機是通過增加每相串聯匝數,實現高壓大容量,多相電動機則是通過增加電動機相數,實現低壓大容量。故大容量的的多相電動機,額可以采用低壓變頻器,避免功率器件串聯,特別適合無法得到高壓,但需要輸出大功率的場合。
(4)電動機冗余度高,多相電動機的一相或較少的幾相定子繞組開路并不會影響驅動系統的起動和運行,只需減載運行而不必停機,適合高可靠性要求的領域。
集中整距六相感應電動機不僅具有上述優點,而且還有其獨特的優勢。
傳統的感應電動機提高功率密度的方法是從電動機設計角度,通過優化電動機尺寸,減少電動機的極數來實現功率密度的提高,隨著電動機設計技術的發展進入了一個新時代, 帶動了評估與優化帶有不同電流與反電勢波形的各種結構類型電動機功率水平的方法的研究。本文利用諧波電流來產生有用的轉矩,提高轉矩密度。
諧波注入法可以實現諧波抑制,功率因數校正,無速度傳感器感應電動機速度識別等等,本文通過諧波注入法注入三次諧波電流從而提高感應電動機的電磁轉矩。由于三次諧波電流在中點連接的相數為3的倍數的電動機中會相互抵消,故目前的研究集中在五相感應電動機和六相雙Y移30°繞組感應電動機,本文選用中點不連接的集中整距繞組的六相感應電動機。
本文從諧波磁動勢入手,理論上定性的得出了六相感應電動機能夠增加電動機的電磁轉矩,并建立了考慮三次諧波電流和空間諧波相互作用產生轉矩條件下的數學模型,該模型能真實反映電動機的物理實際。通過仿真分析,得到與理論相吻合的結論。
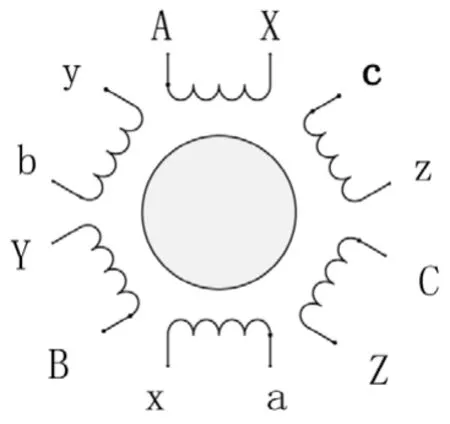
圖1 星點不連接六相感應電動機
2 六相繞組諧波磁動勢分析
用繞組函數和傅里葉分析是分析繞組諧波磁動勢的有效方法。圖為六相整距繞組的一相繞組函數圖和120°導通電流波形。
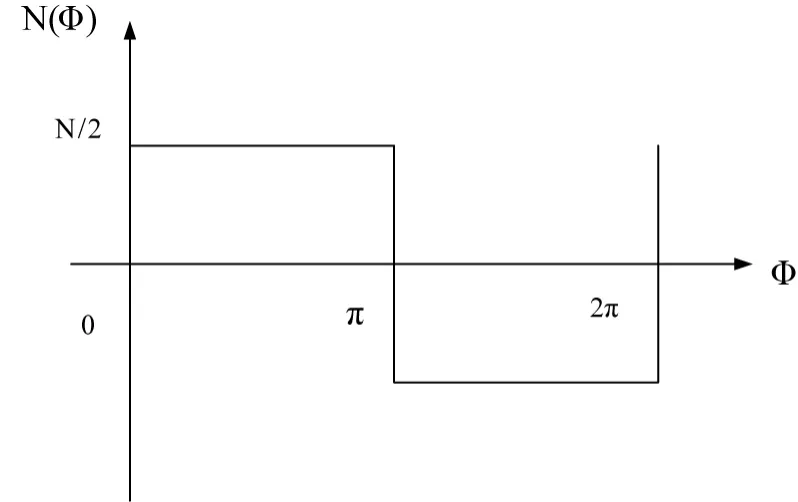
圖2 繞組函數圖
采用繞組函數的方法,n相對稱繞組中第一相的繞組氣隙磁勢為

將繞組函數和繞組電流傅里葉級數展開,則氣隙磁勢用諧波形式表示為

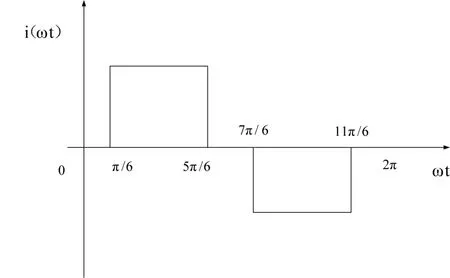
圖3 繞組函數圖
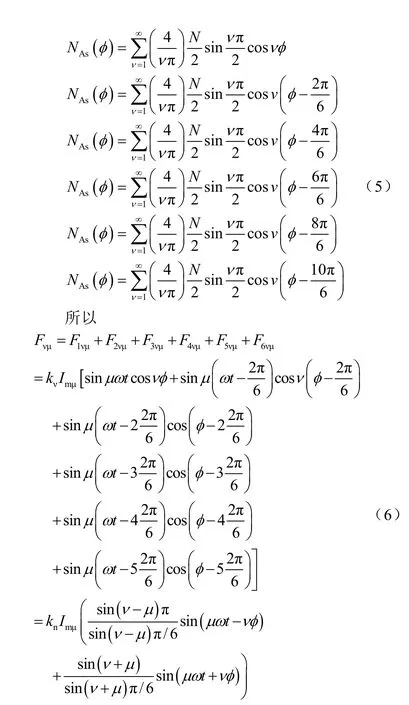
其中,V為空間諧波次數;U為時間諧波次數。同樣地,其余相繞組磁勢諧波可表示為
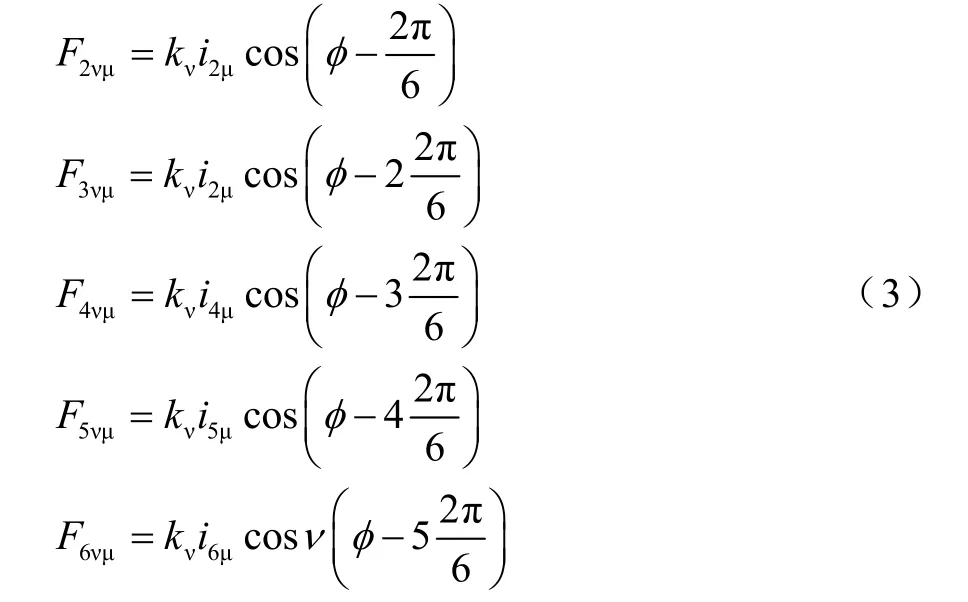
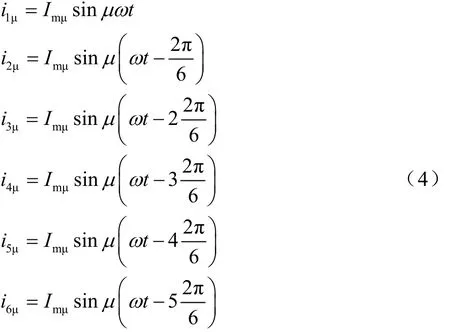
假設繞組電流為n相對稱電流,則每相電流的各次諧波可表示為
由于對稱性,傅里葉級數展開的繞組函數為
由此得出結論:①與三相繞組相比,低次諧波的影響減少,電機轉矩脈動頻率增加,幅值減少,轉矩電流比略微增加;②于磁場為平定波,電機鐵芯利用率提高,電機轉矩密度增加。
3 考慮三次諧波的六相感應電動機數學模型
一般分布繞組六相感應電動機數學模型的建立是假設繞組為正弦分布,即除基波外繞組其他諧波分量都被忽略。那么繞組在考慮空間諧波的影響,所建立的模型顯然有所不同。為了考慮三次諧波電流和三次空間諧波相互作用產生轉矩,取定子電流及其微分為輸入,轉子電流為狀態變量,在靜止自然坐標系下:
(1)轉子電壓方程

(2)定子電壓方程
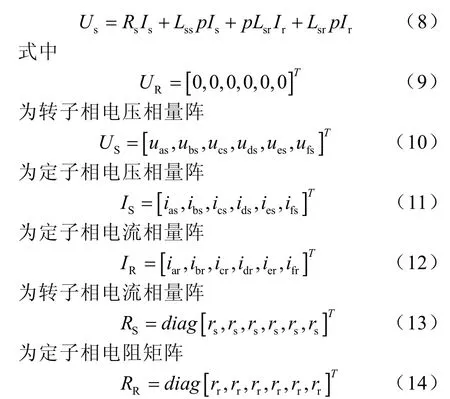
為轉子相電阻矩陣。LSS,LRR為定轉子電感矩陣,LSR為定子到轉子互感矩陣,LSRT為LSR的轉置,微分算子p=d/dt。設θr為以定子a相繞組軸線為參考時的轉子位置電角度,則 LSR和 LSRT互感陣中的元素與θr有關。
(3)轉子運動方程

式(16)中Tem、TL、np、J分別為電磁轉矩、負載轉矩、極對數和電機轉動慣量。
將式(15)帶入式(7)整理得
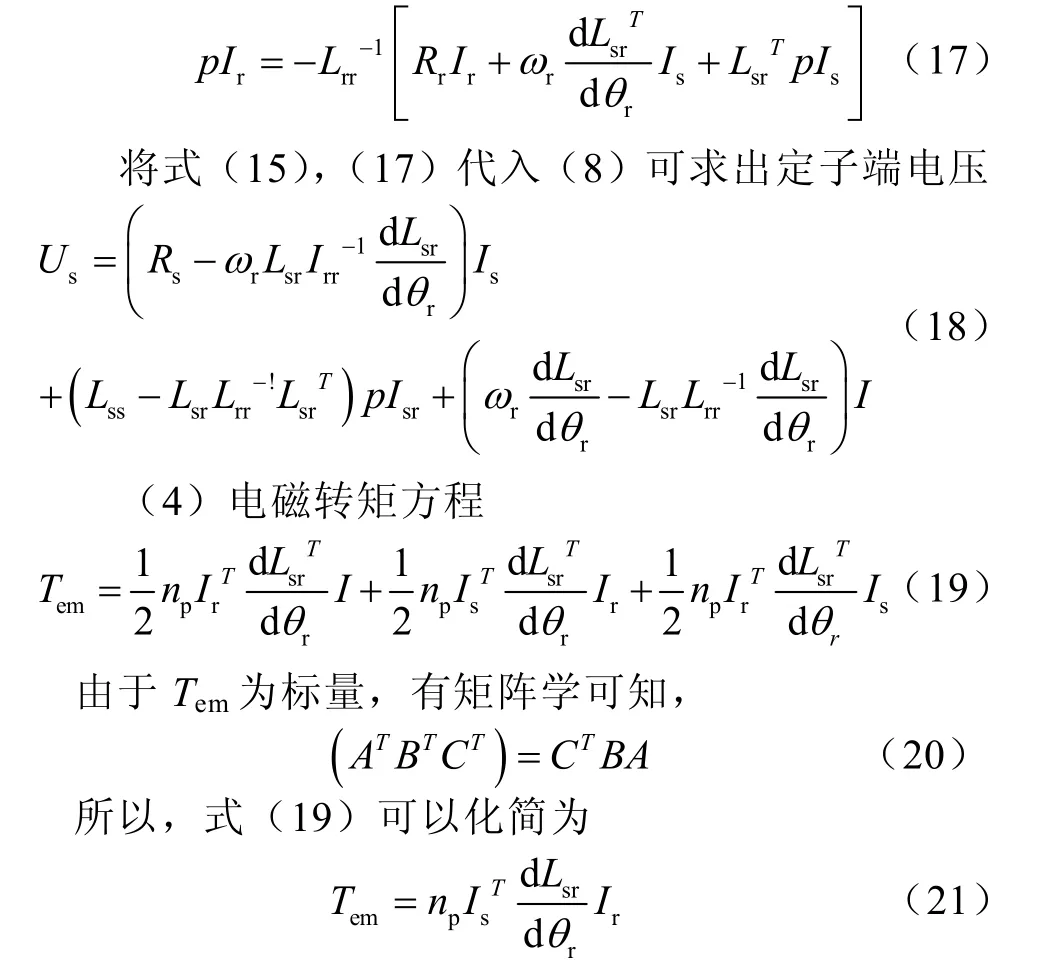
式(15)、(16)、(17)即為電機狀態方程。
(5)電感矩陣的求取
參考繞組函數中的式(5),只考慮基波和三次諧波,a相繞組可以表示為
同理,其他電感也可求得。
4 仿真分析
基于以上數學模型,在Matlab/Simulink軟件平臺下,通過編制S函數和搭建模塊實現電動機的建模,參數通過封裝,界面式輸入。
利用該模型對一臺六相 4極電動機進行了仿真,電動機參數見表1。

表1 電動機參數
電動機參數一致即整個銅損也一樣的情況下,分別做出了加入三次諧波電流和不加入三次諧波電流情況下的仿真曲線,限于篇幅只給出了轉速和電磁轉矩波形,由仿真結果得出如下結果:
(1)由轉速波形看出,在保證相同的慣量等條件下,加入可三次諧波電流的速度響應比沒有加入的要快,表明有用諧波轉矩產生。
(2)由轉矩波形可以看出,在啟動和圖加負載時段,三次諧波電流產生的瞬時最大轉矩也比沒有加入三次諧波電流的要大。
(3)仿真過程中還發現,如果數學模型電感陣中沒有諧波項,即使加入三次諧波電流,對轉矩和轉速波形幾乎沒有影響,因為只有三次空間諧波和三次時間按諧波才能戶型啊作用產生有用的轉矩,三次諧波電流與空間基波相互正交,不產生轉矩,驗證了在考慮加入三次諧波電流時的數學模型,電感陣必須發生變化。
所以由于采用時開環仿真,沒有考慮控制因素。雖然提高轉矩效果并不明顯,但能定性看出確有提高。
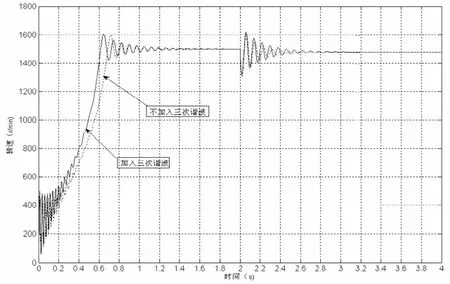
圖4 速度波形對比
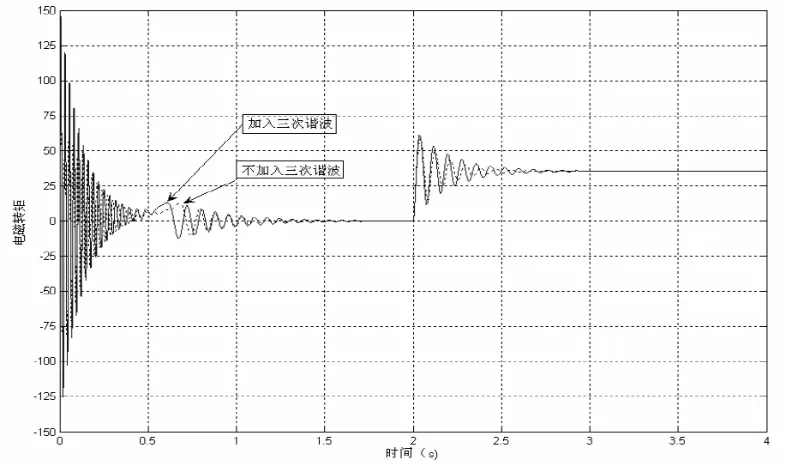
圖5 轉矩波形對比
5 結論
本文建立了六相感應電動機考慮三次諧波電流條件下的數學模型。并通過編制S函數實現了電動機的建模,該模型通用性好,仿真表明六相感應電動機中加入三次諧波電流可以改善磁勢的空間分布,解決感應電動機中鐵心材料的局部飽和問題,從而增強了鐵心材料的利用率,增加轉矩,提高轉矩密度。同時表明所建模型正確,對進一步研究電流型逆變器方波供電的仿真分析有一定的參考價值。
[1]侯立軍,蘇彥民. 陳林等. 多相感應電機調速系統的發展現狀和應用前景[J]. 微電機, 2001(5) ∶ 43 - 44.
[2]吳新振, 王祥珩, 羅成. 多相異步電機諧波電流與諧波磁勢的對應關系[J]. 清華大學學報(自然科學版),2005,45(7)∶865-868.
[3]陳林,熊有倫. 多相感應電動機調速系統研究與應用[J].微特電機,2002(1)∶33-35.
[4]H.A. Toliyat. Analysis of a Concentrated Winding Induction Machine for Adjustable Speed Drive Applications Part1 (motor analysis) [J]. IEEE trans. On Energy Conversion,1991,6(4).
[5]M.J. Duran. Harmonic CurrentInjection inMulti-phase Machines for High Specific Torque Including SkinEffect [J]. IEEE Transact ion on Energy Conversion,1994,8(3).
[6]H.A. Toliyat. Analysis and Simulation of Five-phase Synchronous Reluctance Machines Including Third Harmonic of Airgap MMF [J]. IEEE trans.on Industry Applications,1998,34(2).
[7]A.R.Munoz and T.A.Lipo, “Dual stator winding induction machine drive,” [J]IEEE transactions on Industry Applications, 2000,36(9)∶1369-1379.
[8]Renato de Oliverira da Costa Lyra .Torque Density Improvement in a Six-Phase Induction Motor with Third Harmonic Current Injection [D].University of Wisconsin- Madison.2002.
