基于動態規劃的城市道路提取改進算法
2010-07-07 06:52:34劉曉平朱曉強
圖學學報 2010年4期
劉曉平 , 朱曉強, 余 燁, 李 琳
(1. 特種顯示技術教育部重點實驗室(合肥工業大學),安徽 合肥 230009;2. 合肥工業大學計算機與信息學院VCC研究室,安徽 合肥 230009)
從航空或衛星影像中提取道路一直都是一個很具有挑戰性的問題。根據道路特征提取的自動化程度,道路特征提取分為自動特征提取和半自動特征提取。自動提取方法包括基于平行線對[1]、基于二值化和知識[2]、基于窗口模型特征[3]等;半自動提取的常用算法有模板匹配[4]、動態規劃[6]、可變模型或Snakes方法[7]等。到目前為止,從航空或衛星影像中全自動識別道路仍然處于不成熟的狀態[8],而且在未來的短期時間內也很難開發一套完全脫離人工干預而自動識別道路的系統。在各種半自動道路提取方法中,由于動態規劃是一個解決優化問題的穩定算法,能夠確保結果的最優性,成為近年來道路半自動提取的首選方法之一。動態規劃法首先應用在低分辨率影像提取道路中(Sakoda等,1993;Gruen和Li,1997;Merlet和 Zerubia,1996)。Dal Poz等[6]修改了“代價”函數,使之適用于從中高分辨率影像中提取道路。
另一方面,從機載LiDAR(Light Detection and Ranging)數據中提取道路在近年來也有了一定的研究,Hatger和 Brenner在文獻[10]中結合LiDAR數據和已經存在的數據庫信息提取道路的幾何屬性;在Rieger等人的論文[11]中研究了林區范圍內由 LiDAR點云提取道路方法;為充分利用LiDAR數據信息,文獻[12]和文獻[13]引入了強度信息輔助道路的提取。
由于從航拍圖像中提取道路時一些經驗條件難以滿足,如要求道路的灰度比背景亮,道路的灰度變換不大等,而從 LiDAR數據中提取道路對點的要求比較高,如點集密度高、需要強度信息等,因此,本文融合 LiDAR點云和配準的航空圖像兩種數據源來提取道路,降低了對單一數據源的依賴性。文章首先介紹了現有的基于動態規劃的道路提取方法和代價函數的意義;然后對 LiDAR點云數據進行重新采樣,并根據提取的道路特征對原有代價函數進行擴展;為精確配準航拍圖像和 LiDAR數據,本文利用局部控制點對當前位置進行插值;最后通過試驗對本文算法進行驗證。
1 基于動態規劃的道路提取及其改進
1.1 現有基于動態規劃道路提取方法
1.1.1 在低分辨率航拍圖像中的應用
利用動態規劃從航拍圖像中提取道路首先從較低分辨率的圖像中[14],將道路建立成線狀的模型。道路模型中同時考慮道路的幾何屬性和物理屬性(如道路為線狀、灰度和寬度變化慢、方向變化平緩等)。由于道路可以用多邊形來表達{ p1, p2,… ,pn},其中 pi=( xi,yi)是多邊形在圖像上的第i個定點。則道路模型可以用下面的代價函數和約束不等式表示


其中 Ep1(pi,pi+1), Ep2(pi,pi+1),和 Ep3(pi,pi+1)描述道路的各種幾何和物理屬性,每個表達式只依賴于連續鄰接的兩個點pi和pi+1;αi表示由點pi-1和pi構成的向量方向;β和γ為正常數;|ΔSi|為pi-1和pi之間的距離;T為用戶定義的由控制點構成的臨近兩個向量的方向改變量的上限。
分析式(1)可以知道,代價函數為一系列Ei的加權和,每一個Ei依賴于多邊形P的 3個連續的控制點(pi-1, pi,pi+1),即每個點pi只和它的前一個pi-1、后一個點pi+1直接相關。這使得可以利用動態規劃來該問題,通過一系列的決策過程來達到優化的目的。根據精度要求的不同,迭代的過程可以在原有的控制點之間添加一些額外的輔助控制點。
1.1.2 在中、高分辨率航拍圖像中的應用
為使式(1)也能適合從高分辨率航空影像中提取道路,文獻[6]研究了中等和較高分辨率航空影像中道路中心線的提取方法,將道路的邊緣信息和寬度信息融入到式(1)得到了新的代價函數如下

1.2 代價函數的改進
在式(3)中雖然融入了航空圖像中道路的各種屬性,但是很多條件是基于經驗,當條件改變的時候,該方法很難保證道路提取的正確性,如Ep中假定路面的灰度高于兩側的灰度值[14],路
1面的灰度值變化緩慢,這些條件在大多數情況下是成立的,但是不能絕對保證(如斑馬線處灰度值變化劇烈等)。為提高算法的魯棒性,本文中引入了另外一個數據源——LiDAR點云,從而可以為模型式(3)添加更多的路面幾何信息,如路面的邊緣、高度等。
1.2.1 LiDAR數據的重采樣和特征提取
為使LiDAR數據能夠與航空圖像結合使用,并減少對數據密度的依賴性,本文對 LiDAR點云進行重新采樣。重采樣的方法就是,按LiDAR點云的X、Y范圍進行等網格劃分,每個網格對應像素的灰度值正比于網格內的點的平均高度。由于 LiDAR點云分布是雜亂無章、密度不均的(如圖1所示),所以生成的高度圖包含空洞[12],空洞處像素用離最近的像素灰度值代替。至于網格的大小可以根據實際的點云密度來設定。該階段生成的高度圖由于灰度對應 LiDAR點集的高度信息,為后續處理和敘述的方便,記該高度圖為Image1(如圖2所示),并用邊緣檢測方法(如Canny方法)生成邊緣圖像Image2。因為路面是平滑的,檢測出的邊緣不會出現在路面上,而道路與兩旁的建筑物以及立交橋與兩旁的地面有明顯的高度差,因此在道路邊緣處會檢測到邊緣點的存在(如圖3所示)。
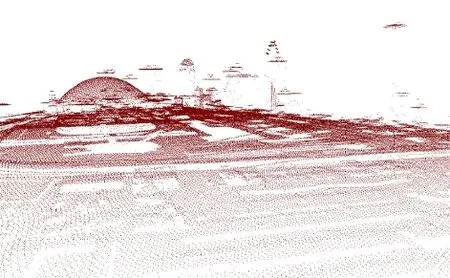
圖1 城市LiDAR點云數據

圖2 高度圖像
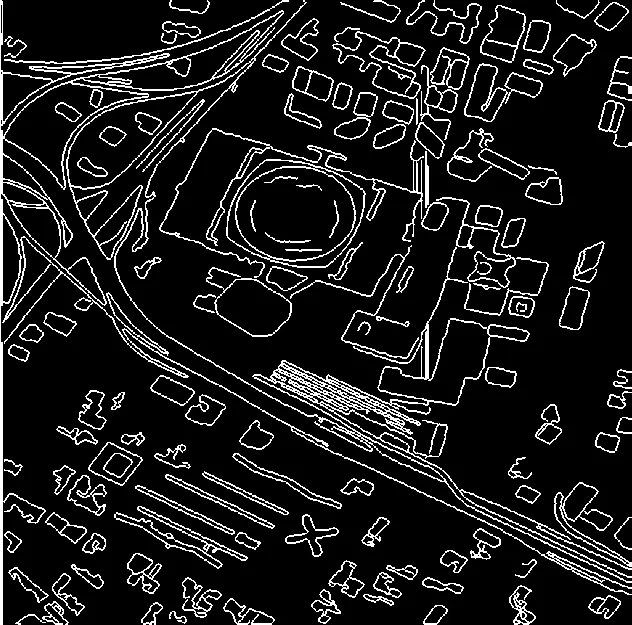
圖3 邊緣圖像

圖4 邊緣距離圖像
為確定道路中心線的精確位置,根據邊緣檢測圖像Image2生成邊緣距離圖像Image3,其不僅在求取道路中心線中用到,在最后求取道路寬度時也要使用該圖像中的信息。Image3生成方法為,對于 Image2中任一非邊緣點P,求取其最近的邊緣點E1,若E1有關于P對稱的邊緣點E2,則將P和E1的距離作為像素P點的灰度值,如圖4所示。
1.2.2 LiDAR數據道路特征
根據圖像Image1, Image2和Image3的生成過程和道路本身固有的屬性,可以得到如下有關道路特征的描述:
(1)小段范圍內道路高度變化小,從而對應Image1中像素的灰度值變化小,則有

其中 f(s)為道路曲線的表達式;s為道路曲線的弧長;Δsi為取定的一段道路;G可分別表示灰度圖像Image1和航拍圖像 Image4的灰度值;Gm( Δ si)為對應圖像中在道路段Δsi上的平均灰度值,即
(2)路面是平滑的,在邊緣圖像 Image2中道路曲線一般不會橫跨邊緣點,也即 Image2中的邊緣點對代價函數E的貢獻應該最小,為

其中 G表示圖像Image2對應圖像灰度值。
(3)提取的道路應離道路的中心線很近,則邊緣距離圖像中 Image3中每點的灰度值對代價函數的影響為

其中 G表示圖像Image3對應圖像灰度值。
(4)道路呈現帶狀形態,在短距離內不會有太大的寬度變化,基于此得出道路寬度變化對代價函數的影響

其中 G表示圖像Image3對應圖像灰度值。
1.2.3 代價函數的擴充
綜合航空圖像和 LiDAR數據的信息,可以從式(3)~式(7)中得出最終的道路模型的代價函數

其中 Ep5(pi,pi+1)=μ1E1+μ2E2-μ3E3+μ4E4,
式(2)、式(8)共同組成了本文道路識別的動態規劃半自動提取模型。
2 航拍圖像與LiDAR數據配準
由于距離較遠和影像獲取環境的不穩定等因素會使獲取的圖像有一定的畸變和傾斜,影響道路的提取效果和精度。因此,在結合航空圖像和 LiDAR點云提取道路之前需要對兩者進行配準。配準過程需要選定一些控制點作為配準依據,所提供的控制點個數和分布情況影響配準結果。配準的每一步都使用全部的控制點不僅計算量很大,而且當控制點離當前像素點較遠時反而會降低配準的精度。
本文利用基于局部插值的思想,首先對控制點進行構造Delaunay三角網,然后對每個三角形內的像素只使用該三角形的頂點進行配準[15],既減少了計算量,也能保證配準的精確性。如圖5和圖6分別為配準前的航拍圖像和由LiDAR數據生成的高度圖,以及根據選取的控制點所構建的三角網,圖7為與圖6高度圖配準的航拍圖像。

圖5 配準前的航拍圖像
圖6 LiDAR高度圖

圖7 配準后的航拍圖像
3 試驗結果與分析
本文算法是半自動提取方法,首先由用戶在道路附近選定一些控制點,之后的工作就由計算機來自動完成。它會自動算出道路代價函數的最大值,并根據列表保存的中間步驟信息,逆向求出使代價函數達到最大時的道路中心線位置。此外,通過道路中心線的位置和邊緣距離圖像Image3,算出道路中心線上任一位置的道路寬度;根據道路中心線的位置和高度圖 Image1的生成過程計算道路的高度。
所使用的試驗數據來源于在美國新奧爾良市區的LiDAR數據。圖2~圖4為LiDAR數據信息,圖7為該區域的配準航拍圖像,圖8中為用戶選取的控制點位置,圖9顯示所提取的道路位置和寬度信息,圖10則為道路重建后的三維模型。從提取過程來看,用戶提供的控制點甚至不需要在道路上,該算法仍然能夠取得很好的效果。
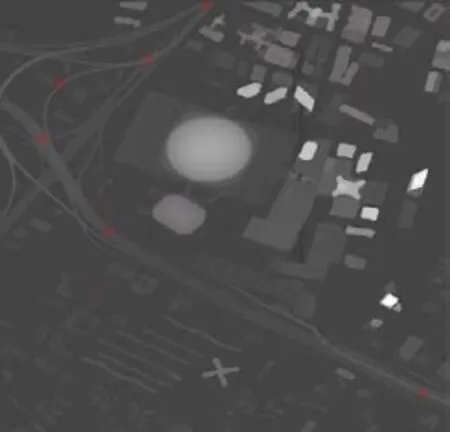
圖8 控制點位置
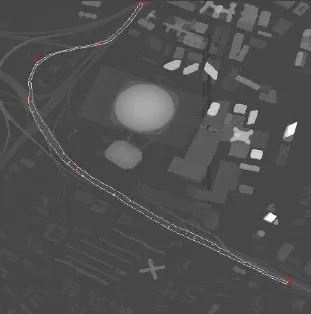
圖9 提取的道路
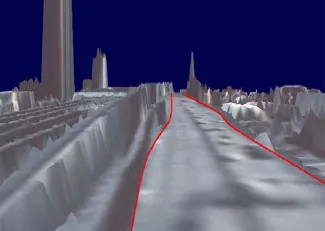
圖10 道路重建后
4 結束語
本文首先總結了動態規劃方法在道路提取過程中的發展,其最先應用于較低分辨率的航拍圖像中,將道路抽象為一條很細的線狀,為了將該方法應用于中、高分辨率的航拍圖像中,研究人員引入了道路的寬度信息,從而能夠提取航拍圖像中的道路中心線。
為了進一步提高算法的魯棒性,本文融合航拍圖像和LiDAR點云兩種數據源,對LiDAR點云數據進行重新采樣,分別生成對應的高度圖、邊緣檢測圖像和邊緣距離圖像;結合生成的三幅圖像和對應的航拍圖像提取道路的特征并用于改進后的動態規劃算法;最后通過試驗驗證了本文方法的可行性。
[1]Ton J, Jain A K, Enslin W R, et al. Automatic road identification and labeling in Landsat 4 TM images [J].Photogrammetric Engineering & Remote Sensing,1989, 43(2): 257-276.
[2]Wang F, Newkirk R. A knowledge-based system for highway network extraction [J]. IEEE Transactions on Geoscience and Remote Sensing, 1988, 26(5):525-531.
[3]Barzohar M, Cooper D B. Automatic finding of main roads in aerial images by using geometric-stochastic models and estimation [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996,18(7): 707-721.
[4]楊 云, 朱長青, 張 德. 高分辨率遙感影像上道路中心線的半自動提取[J]. 計算機輔助設計與圖形學學報, 2007, 19(6): 781-785.
[5]German D, Jedynak B. An active testing model for tracking roads in satellite images [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18(1): 1-14.
[6]Pos A, Vale G. Dynamic programming approach for semi-automated road extraction from medium and high-resolution images [J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2003, 34(8): 87-91.
[7]Armin Gruen, Li Haihong. Semi-automatic linear feature extraction by dynamic programming and LSB-snakes [J]. Photogrammetric Engineering and Romote Sensing, 1997, 63(8): 985-995.
[8]Shackelford A K, Davis C H. Fully automated road network extraction from high-resolution satellite multispectral imagery [C]//Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, 2003: 461-463.
[9]Zhu C, Shi W, Pesaresi M, et al. The recognition of road network from high-resolution satellite remotely sensed data using image morphological characteristics [J].International Journal of Remote Sensing, 2005, 26(24):5493-5508.
[10]Hatger C, Brenner C. Extraction of road geometry parameters from laser scanning and existing databases[C]//International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXIV, Part 3/W13,2003.
[11]Rieger W, Kerschner M, Reiter T, et al. Roads and buildings from laser scanner data within a forest enterprise [C]//IAPRS, ISPRS Workshop, Vol. 32,La Jolla, California, 1999: 185-191.
[12]王 濤, 楊建思, 廖明生. 從機載激光掃描數據中提取道路[J]. 測繪信息與工程, 2006, 31(5): 10-11.
[13]Simon Clode, Peter Kootsookos, Franz Rottensteiner.The automatic extraction of roads from lidar data [C]//International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXV-B3,2004: 231-236.
[14]Armin Gruen, Li Haihong. Road extraction from aerial and satellite images by dynamic programming [J].JSPRS Journal of Photogrammetry and Remote Sensing, 1995, 50(4): 11-20.
[15]羅月童, 朱曉強, 劉曉平. 基于三點的航拍圖像傾斜校正方法及其應用[C]//中國儀器儀表學會第九屆青年學術會議論文集, 2007: 590-593.