水電廠等值禁止運行區及動態應用技術
2010-07-14 15:44:22段振國王永國周懷念吳雙杰李艷麗
水電站機電技術 2010年3期
關鍵詞:振動
段振國,王永國,周懷念,吳雙杰,李艷麗
(1.北京中水科水電科技開發有限公司,北京100038;2.貴州東風發電廠,貴州清鎮551408)
0 引言
由于水電廠具有機組起、停過程相對簡單,負荷調整迅速等特點,如果水電廠水庫具有一定的調節性能,通常在電網中擔負調峰、調頻及事故備用任務。具有調節性能水庫的水電廠一般都參加電網的遠方自動發電控制功能,由上級調度機構實時控制水電廠的全廠出力來滿足電網的需求。通常水電廠計算機監控系統配備電廠自動發電控制(AGC)功能軟件,電廠AGC將上級調度機構實時下達的全廠總負荷需求分配到各臺可以控制的機組中,來滿足電網的需求[1]。
由于大中型水輪發電機組一般都具有一定的振動區或氣濁區,機組不能在該區域內長時間連續運行,導致機組的負荷調節范圍通常不能連續,電廠AGC的任務之一是保證在機組間進行負荷分配時,要躲避機組的禁止運行區域,同時還要盡量使機組少跨越這些禁止運行區域。例如一臺190MW的水輪發電機組,有一段60MW到120MW的振動區,這時機組就分成了兩個可運行區域:(1)120MW到190MW;(2)0MW到60MW。
上級調度機構的AGC實施對電廠全廠總負荷控制,對電廠下達全廠負荷調節指令,現在一般采用以下兩種方式實現電廠和上級調度機構控制系統的協調:
(1)電廠上送調度機構的是電廠全廠調節下限和上限方式,電網AGC在全廠調節下限和上限范圍內下達的全廠負荷調節指令,電廠AGC負責進行機組間負荷分配和躲避機組的禁止運行區域。假設只有一臺前面提到的190MW機組,這樣送調度的全廠調節下限和全廠調節上限是0MW和190 MW,如果下達的負荷指令落在禁止運行區域內,電廠AGC按偏差最小的原則躲避禁止運行區域。所以這種方式有可能因躲避禁運區,而帶來較大的控制偏差。
(2)電廠上送調度機構的是電廠當前調節下限和上限方式。電網AGC在當前調節下限和上限范圍內下達全廠負荷調節指令,電廠AGC負責進行機組間負荷分配。假設只有一臺前面提到的190MW機組,當機組在120MW到190MW運行時,上送調度的當前調節下限和調節上限是120MW和190MW;當機組在0MW到60MW運行時,上送調度的當前調節下限和調節上限是0MW和60MW。當上級調度機構AGC發現當調節范圍不能滿足負荷調整要求時,由運行人員設定下達一個到另一連續運行區的負荷指令,實現連續運行區的轉移。所以這種方式不會出現因躲避禁運區,帶來控制偏差問題,但是運行區域的轉移自動化程度不高。
針對以上電廠和上級調度機構控制系統協調方式的不足,本文提出了采用全廠等值禁止運行區域及其動態上送方案,并成功在貴州東風電廠應用。
1 水輪發電機組禁止運行區域
水輪發電機組的禁止運行區域通常指振動區和氣濁區,在本文中是指考慮機組所有運行要求后的禁止運行區,主要考慮以下因素:(1)機組的振動區和氣濁區;(2)機組投入PSS功能要求的最小出力;(3)考慮一次調頻動作要求的裕度。圖1是機組一、二段振動區情況下機組禁止運行區示意圖。

圖1 機組禁止運行區示意圖
2 全廠動態等值禁止運行區域
采用全廠動態等值禁止運行區域方式下,我們對幾個狀態(見圖2)進行如下定義:
全廠當前運行區:當參加AGC的所有機組都在可調節的運行區中運行時,稱全廠在可調節區運行;
跨越振動區過程:從一個全廠當前運行區向另一個可運行區過渡時,必定是有機組在跨越振動區;
全廠當前上振動區、全廠當前下振動區都是相對于全廠當前運行區而定義的;
全廠調節上限=參加AGC機組的調節上限+未參加AGC機組的當前實際出力;
全廠調節下限=參加AGC機組的調節下限+未參加AGC機組的當前實際出力。
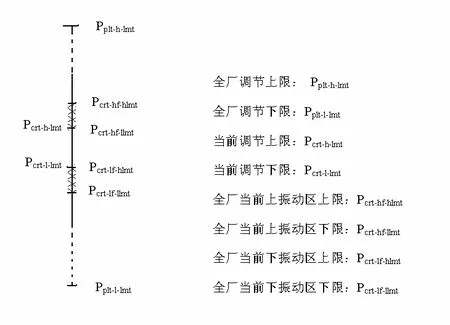
圖2 全廠動態等值禁止運行區域示意圖
送上級調度機構信息的原則:
(1)上送全廠調節上限、全廠調節下限。
(2)上送全廠當前上振動區上限、下限。如果不存在上振動區,則這兩個限值都送全廠調節上限。當有機組在跨越振動區時,這兩個限值都維持不變,直到機組跨越振動區完成時再送新限值。
(3)上送全廠當前下振動區上限、下限。如果不存在下振動區,則這兩個限值都送全廠調節下限。當有機組在跨越振動區時,這兩個限值都維持不變,直到機組跨越振動區完成時再送新限值。
3 在貴州東風發電廠的應用
3.1 東風發電廠概況
貴州東風發電廠位于貴州省清鎮市鴨池河,裝機有4臺水輪發電機組,其中1到3號機組是190MW,4號機組是125MW,每臺機組都有一段較強振動區[2]。
貴州東風發電廠是貴州省水電廠中最早實現自動發電控制(AGC)功能的水電站之一,并通過原國家電網公司的無人值班(少人值守)驗收。東風發電廠自動發電控制(AGC)功能最早是在2000年應用的,當時控制三臺190MW水輪發電機組。電廠擴機后對AGC軟件實施升級,增加了對4號機組的自動發電控制功能。
東風發電廠自動發電控制(AGC)功能一直參加貴州省中調的自動發電遠方控制,省中調對該電廠按全廠方式控制,下發全廠總遙調值,控制全廠總出力。電廠自動發電控制(AGC)功能將依據省中調下發的全廠總遙調值和發電但不參加AGC控制機組的出力情況,計算出要在AGC可控機組中分配的出力要求,然后在發電運行的AGC可控機組中間進行負荷分配,分配準則采用按機組耗水等微增率原則,在各AGC成組可控機組中間進行有功負荷分配,在進行有功分配時要考慮下列約束條件:
各臺機組P-Q運行圖;
設置的機組有功限值(振動區等):
上式中,Pagc是AGC要在AGC可控機組間進行分配的總負荷;Preq是全電廠當前總有功出力需求;Pnoagc是沒有參加AGC運行的發電狀態機組的總出力。
原來實現中調遠方AGC控制電廠出力時,采取的模式是:東風電廠AGC根據電廠機組參加的AGC情況、不參加AGC機組的出力情況以及機組禁止運行區情況,動態計算全廠當前連續可調節上、下限值并送給中調。
3.2 試驗及應用情況
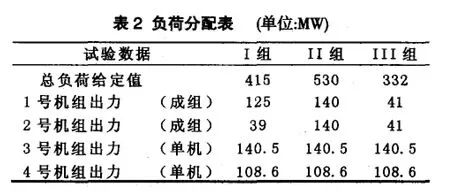
按全廠動態等值禁止運行區域方式的電廠AGC功能在東風電廠進行了實施,于2009年6月同貴州省中調EMS進行了聯合試驗并成功投入運行。表1、表2是同省調進行聯合試驗時記錄的一組數據。1號、2號機為有功成組;3號、4號機為單機狀態;1號、2號、3號機組振動區:40MW~120MW;運行下限:31 MW;運行上限:150MW(由于實際水頭限制),做了三組試驗。

4 結束語
計算水電廠等值禁止運行區域,并動態上送上級調度機構,這種技術有利于遠方自動發電控制功能控制品質的提高,實現電網、電廠對負荷的智能化、高精度控制。這一技術在貴州東風發電廠得到成功應用,也可為類似工程提供借鑒。
[1]周全仁,張海.現代電網自動控制系統及其應用[M].中國電力出版社,2004.
[2]馮德才.東風水電廠自動發電控制技術[J].水電站機電技術,2004,(3).
[3]陳凱,耿瑞杰,等.白山電廠計算機監控系統網調AGC功能的實現[J].水力發電,2002,(4).
[4]段振國,等.白山發電廠自動發電控制(AGC)功能的應用[J].水電站機電技術,2008,(3).
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
