
基于DSP的船舶電站自動準同期裝置研究
2010-07-25 08:12:48楊光明厲孟
船電技術 2010年5期
楊光明 厲孟
(海軍駐武漢四三八廠軍事代表室,武漢430061)
1 引言
船舶電站自動化是無人機艙的一個重要部分,而自動準同期并車是船舶電站自動化的一個重要內容。目前在國內已有多種模擬電路的自動并車裝置,隨著微機控制技術的發展,先進的微機控制的自動并車裝置逐漸投入研制。微機控制的自動并車裝置具有體積小、重量輕、成本低、控制靈活等顯著的優越性。因此,自動并車實現微機控制成為必然的趨勢。
本文介紹了一種基于 DSP技術的自動同期并車裝置,該裝置使用了少量的前置模擬有源濾波電路,其它部件都是數字器件,具有較強的抗干擾能力,采用有很強濾波功能的傅氏算法來計算電壓差,并對計算結果做數字平滑濾波處理,減小電網尖峰干擾的影響;針對普通微機型自動并車裝置常用的線性插值算法預報同期合閘相角易受干擾的缺點,采用最小二乘曲線擬合準確預報同期合閘點,提高了預報的精度,且算法具有極強的抗干擾性,使并車過程安全、可靠、快速,具有一定的實用價值。
2 同期并車裝置基本原理
發電機并網的同期條件保證了發電機投入到電網運行時,沖擊電流比較小,減小系統對發電機組的沖擊,并迅速進入同步運行狀態,減小對電力系統的擾動。
在實際并列操作中,并列的實際條件允許有一定的偏差。我們稱之為準同期條件。發電機實際并網時的準同期條件是:
(1) 并列斷路器兩側電源電壓的電壓差必須在允許的范圍內;
(2) 并列斷路器兩側電源電壓的頻率差必須在允許的范圍內;
(3) 在并網合閘的瞬間,并列斷路器兩側電源電壓的相角差在允許的范圍內。
裝置利用 DSP 實時采集發電機和電網并列的所需信息,并對待并發電機的電壓和頻率作出自動調節,使得發電機與電網的電壓幅值差、頻率差能同時滿足并列條件,然后快速捕捉合閘時機,在脈動電勢S到達兩電壓向量重合(如圖1所示的差頻電壓過零點)之前一定時間(越前時間)發出合閘指令,實現準同期自動并列操作。

圖1 正弦波及其差頻電壓
3 交流電參量計算方法
在檢測并車條件時,待并發電機電壓和電網電壓要基本相等,一般要使待并發電機電壓略高于電網電壓,待并發電機并入電網時會提供一定的無功負載,減輕了原有動力機組的壓力,一般將電壓差限定在5%以內。
交流采樣是對被測信號的瞬時值進行采樣,然后對采樣值進行分析計算獲取被測量的信息。交流采樣的采樣速率要求高,程序計算量相對較大,但它的采樣值中所含信息量大,可通過不同的算法獲取所關心的多種信息(如有效值、相位、諧波分量等等),實時性好,成為目前主要使用的采樣方式。
圖2所示為前置濾波電路和方波整形電路,該濾波電路的優點是直流增益為 1,設計合理的截至頻率可以保證工頻信號的增益衰減很小,避免濾波電路輸出電壓的再次定標;方波整形電路用于頻率、相位測量,DSP在中斷程序中捕獲與電網電壓同頻的方波信號上升沿口,可以計算兩路電壓的頻差和相差,而且在軟件上稍作修改就可以實現采樣頻率的動態跟蹤,可以準確的計算出兩路電壓差。
用微機實現交流電量的測量,有很多種算法,綜合考慮各種算法的優劣,決定采用全波傅氏算法。它具有很強的濾波能力,適于各種周期量的采集,可以準確分解出基波和高次諧波分量。
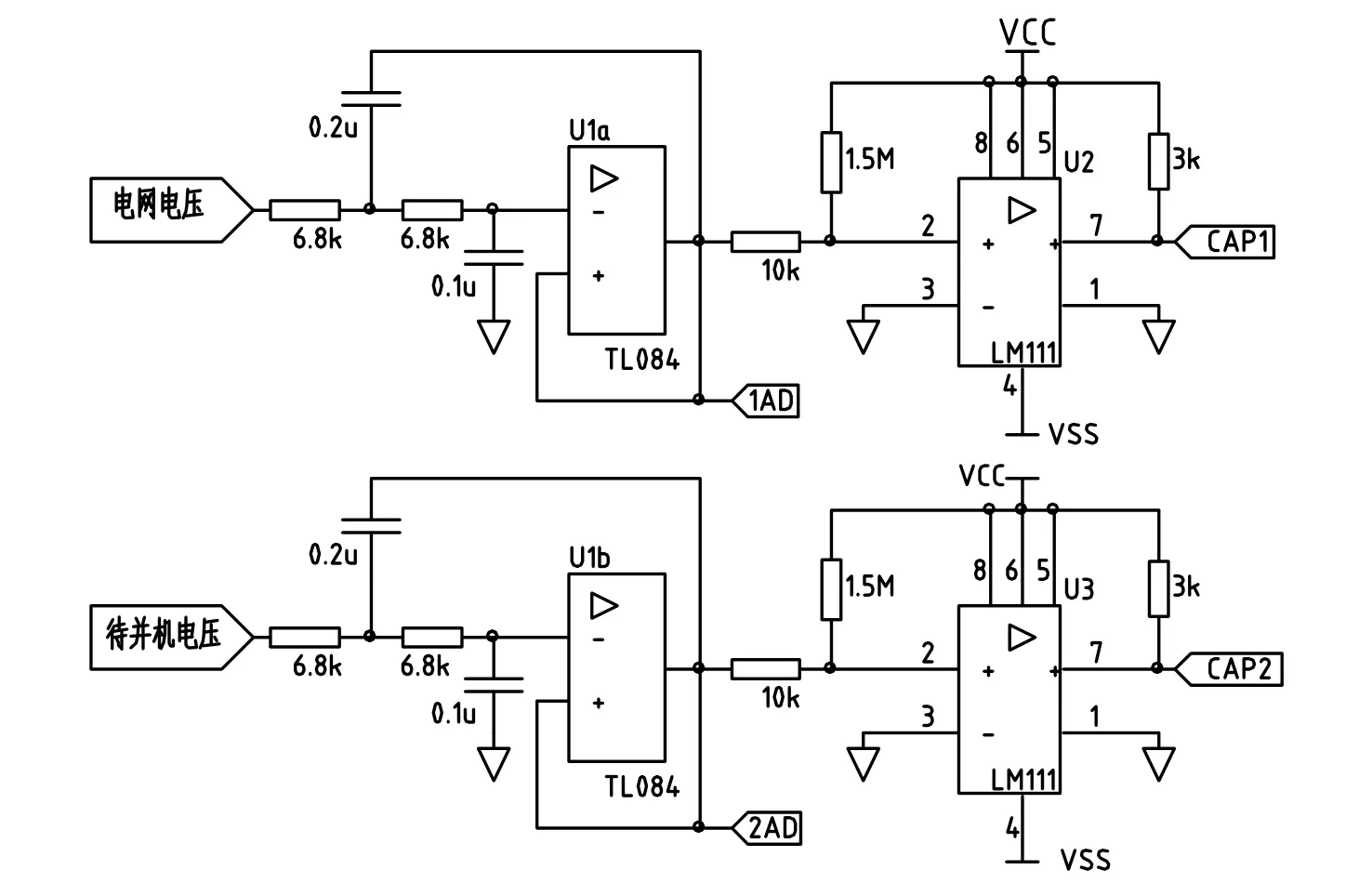
圖2 有源濾波和方波整形電路
設信號u(t)是周期函數,并且滿足狄里赫利條件,則u(t)可以展開分解為三角級數[1]:



離散化后,有:


4 最小二乘曲線擬合預報同期點
常用的線性函數插值預測超前合閘相角算法,根據斜率公式來計算滑差角頻率,再將斷路器的恒定導前合閘時間tDC代入線性插值來預估超前合閘相角δYJ,從而判斷是否滿足合閘相角條件。在電網諧波干擾嚴重時,過零比較器測得的波形相角差是存在誤差的。僅僅由最近兩次的相角測量值來計算超前合閘相角,得出的計算結果會存在誤差,特別是在電網電壓出現的較大的跌落或干擾尖峰時,如果前端濾波電路無法濾除該干擾,由兩次相角檢測結果來預估超前合閘相角δYJ,極有可能發出誤合閘脈沖。
如果保留過去的N個相角測量值,用多項式來進行最小二乘曲線擬合,由多個測量數據的加權值來預估超前合閘相角δYJ,這樣可以避免因單個數據的誤差而發出誤合閘脈沖[2]。下面是依據一次多項式進行曲線擬合,并采用了過去九個數據測量點來預估超前合閘相角的計算過程:
設擬合函數δ(t)=a0+a1t,取權函數ω(x)=1,即認為每個觀測點對預估值的影響相同。其中,δ(t)是隨時間變化的相角差,測量時間t近似認為是等間距的9個時間點。
根據正規方程組ATAa=ATδ,這里基函數為φ0=1,φ1=t;系數向量a=(a0,a1)T;
相位測量值向量:

系數矩陣:

因為系數向量a=(ATA)-1ATδ,可得系數向量如下:

只要測得過去九個點的相角測量值,將其代入式(6)和式(7),求得擬合函數的系數a0、a1。如果期望斷路器觸點閉合的瞬間,待并發電機電壓和電網電壓的瞬時相位近似為零,還需將時間t=4+tDC/T(T是電網電壓的周期,近似認為是20 ms,可以離線整定t,避免除法運算)代入擬合函數,如果求得預報相角差δ略大于360°,就認為捕捉到合閘時機,馬上發出合閘脈沖。
在極端情況下兩側頻差Δf=0.25 Hz,20 ms內角度差變化計算如下:
Δφ=2× 3.14× 0.25× 2 0× 1 0-3= 0.0157(弧度)=1.8°(角度)
即算法本身將給同期并車帶來最大 1.8°的誤差,能滿足工程要求。
為了驗證最小二乘曲線擬合的優越性,模擬了一組測量所得相角差值,假設電網頻率為 50 Hz,待并發電機為 50.2 Hz,斷路器的超前動作時間tDC=100 ms。下表中九個數據點中最后的兩個相角差相對理想的相角差(理想的曲線δ(t)=347.04+1.44t有±1°的誤差:

表1 測量相角差數據表
把數據代入方程(6)(7),計算得擬合曲線為δ=347.4+1.4567t,將t=4+100/20=9代入,得到斷路器主觸電閉合瞬間得相角差δ=360.5103°,可見最后兩個點的數據對超前相角預估產生的誤差不大于0.6°。可見最小二乘曲線擬合在抗干擾性方面具有較強的優勢。
5 同期合閘試驗
同期合閘試驗采用了工頻電網和函數信號發生器HP33120A作為輸入信號,電網的頻率范圍在 49.95~50.05Hz波動,信號發生器輸出頻率定為50.20 Hz,即頻差在0.15~0.25 Hz 波動,滿足頻差條件。四通道示波器 TSD3014B的 CH1通道是電網電壓信號,CH2通道是帶并發電機電壓信號,CH3是輸出合閘波形,采用示波器的數學功能MATH通道(CH1-CH2),即M通道顯示兩個不同頻率電壓相減產生的差頻電壓波形,其過零點表示相角差為零。圖3顯示了合閘的實測波形,斷路器動作時間假定為100 ms,圖中箭頭指向合閘信號發出100 ms后差頻電壓瞬時值,可以認為合閘相角差就在0度左右,達到同期并車裝置評定的較高標準。
6 結論
采用最小二乘曲線擬合算法預估,計算過程更為簡單,計算過程只有加減運算和少量的乘法運算。這樣的運算正好符合DSP的指令特點,所有的累加和乘法只需要單個機器時鐘周期,避免使用間接除法指令耗費大量的運算時間;而且最小二乘曲線擬合算法保留了過去多個數據點的信息,使得超前合閘相角預估的結果精度更高、可信度也更高,非常適合在諧波嚴重、電網品質較差的船舶電站中使用。

圖3 合閘波形
[1] 楊艷秋, 曹龍漢, 李建勇, 文武松. 一種基于交流采樣技術的內燃機電站電氣性能測試系統. 移動電源與車輛, 2005, 4.
[2] 李紅. 數值分析. 武漢: 華中科技大學出版社, 2003.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電力工程技術(2014年1期)2014-03-20 14:19:06
