基于混沌振子和小波理論的軸承故障診斷方法
2010-07-26 13:58:56紀(jì)國(guó)宜
軸承 2010年5期
張 勇,紀(jì)國(guó)宜
(南京航空航天大學(xué) 振動(dòng)工程研究所,南京 210016)
混沌振子檢測(cè)微弱信號(hào)主要是利用混沌系統(tǒng)對(duì)初始條件的敏感性,當(dāng)被測(cè)信號(hào)輸入混沌系統(tǒng)后就可導(dǎo)致系統(tǒng)的動(dòng)力學(xué)行為發(fā)生變化,從而測(cè)出有用特征信號(hào)[1-2]。而小波分析是一種多尺度的分析方法,在故障診斷方面有著廣泛的應(yīng)用。現(xiàn)將小波分析思想與混沌振子結(jié)合起來(lái)檢測(cè)滾動(dòng)軸承的故障信號(hào),以實(shí)現(xiàn)對(duì)軸承故障的成功診斷。
1 基于混沌振子檢測(cè)信號(hào)的方法
1.1 混沌振子方程
從微弱信號(hào)的檢測(cè)下限、混沌系統(tǒng)檢測(cè)信噪比、系統(tǒng)混沌判據(jù)的證明等幾方面,文獻(xiàn)[3]對(duì)Duffing方程進(jìn)行了改進(jìn),提出的混沌檢測(cè)模型為:
(1)
式中:k為固定值,fcos (t)為周期策動(dòng)力。此方程構(gòu)成的非線性動(dòng)力系統(tǒng)是一個(gè)混沌系統(tǒng),其參數(shù)的攝動(dòng)會(huì)引起周期解發(fā)生本質(zhì)的變化。在進(jìn)行微弱信號(hào)檢測(cè)時(shí),將待檢信號(hào)作為周期策動(dòng)力的攝動(dòng)并入系統(tǒng),通過(guò)觀測(cè)混沌系統(tǒng)的相軌跡變化,可知待檢信號(hào)中是否含有周期微弱信號(hào)。
設(shè)待測(cè)信號(hào)為:
s(t)=Acos (t)+σrandn(t)
(2)
式中:randn(t)為滿足正態(tài)分布的均值為零的白噪聲;σ為噪聲的標(biāo)準(zhǔn)偏差;A為微弱信號(hào)的幅值。將s(t)代入(1)式得:
(3)
采用4階Runge-Kutta法,對(duì)(3)式進(jìn)行數(shù)值微分。選擇不同的步長(zhǎng)時(shí),從同一連續(xù)系統(tǒng)中導(dǎo)出的離散系統(tǒng)也不相同,特別是在系統(tǒng)從混沌到有序轉(zhuǎn)變這一特別情況下,不同的步長(zhǎng)值將導(dǎo)致分岔值明顯不同[4]。考慮到不同的步長(zhǎng)h、頻率ω以及噪聲的強(qiáng)度都會(huì)對(duì)閾值產(chǎn)生微小的影響,經(jīng)過(guò)大量的仿真試驗(yàn),認(rèn)為選取f=0.717較為合適,此時(shí)系統(tǒng)雖然處于混沌運(yùn)動(dòng)狀態(tài),但即將向周期狀態(tài)轉(zhuǎn)變。
為了滿足信號(hào)檢測(cè)的需要,將(3)式進(jìn)行尺度變換:
ω2[Acosωt+σrandn (t)]
(4)
可以證明(3)式和(4)式系統(tǒng)的分岔值是相同的[5]。
1.2 混沌振子的間歇運(yùn)動(dòng)
間歇混沌主要是指非線性系統(tǒng)在時(shí)間和空間上表現(xiàn)出的有序和無(wú)序交替出現(xiàn)的特殊動(dòng)力學(xué)形態(tài)。現(xiàn)所指的間歇混沌是由周期策動(dòng)力幅值在非平衡相變臨界值附近的消漲而引起的。
當(dāng)內(nèi)驅(qū)動(dòng)信號(hào)與微弱信號(hào)存在頻率差時(shí):
cos [(1+Δω)t+φ]
(5)
式中:fcos (t)為內(nèi)驅(qū)動(dòng)信號(hào);Δω為微弱信號(hào)與內(nèi)驅(qū)動(dòng)信號(hào)的角頻率差;A為微弱信號(hào)幅值;φ為微弱信號(hào)的相位。對(duì)(5)式等號(hào)的右側(cè)進(jìn)行變換,如下所示:
fcos (t)+Acos [(1+Δω)t+φ]=F(t)·
cos [t+θ(t)]
(6)
其中:
(7)
(8)
當(dāng)Δω≠0時(shí),F(xiàn)(t)在f+A和f-A之間周期性變化。這樣混沌系統(tǒng)就出現(xiàn)時(shí)而混沌,時(shí)而大周期的間歇混沌現(xiàn)象。當(dāng)Δω很小時(shí),F(xiàn)(t)變化非常緩慢,遠(yuǎn)遠(yuǎn)慢于相變過(guò)程,因此周期和混沌的出現(xiàn)是涇渭分明的。說(shuō)明振子相變對(duì)小信號(hào)很敏感。當(dāng)系統(tǒng)存在微小角頻率差時(shí),F(xiàn)(t)值的大小將在f值左右兩側(cè)變化,系統(tǒng)將以ΔT的周期做間歇混沌運(yùn)動(dòng)。其ΔT的值為:
ΔT=2π/Δω
(9)
因此可以通過(guò)測(cè)量ΔT的數(shù)值來(lái)獲得微弱信號(hào)頻率的數(shù)值。文獻(xiàn)[4]中應(yīng)用Duffing振子分析并得出,當(dāng)角頻率差與系統(tǒng)內(nèi)驅(qū)動(dòng)頻率之比不大于0.03時(shí),可以觀察到間歇混沌現(xiàn)象的發(fā)生。經(jīng)試驗(yàn)發(fā)現(xiàn),在頻差比等于0.03時(shí),微弱信號(hào)的幅值要足夠大才能較清楚地從圖形中看出間歇混沌現(xiàn)象。而在實(shí)際中,由于微弱信號(hào)幅值都很小,通過(guò)仿真得出使用本研究所使用的振子系統(tǒng)在頻差比不大于0.02時(shí),應(yīng)用時(shí)域圖可以較明顯地觀測(cè)出間歇混沌運(yùn)動(dòng)現(xiàn)象。(5)式中令k=0.5,f=0.717,Δω=0.01,A=0.03,φ=-π/6時(shí),系統(tǒng)的間歇混沌運(yùn)動(dòng)的現(xiàn)象如圖1所示。
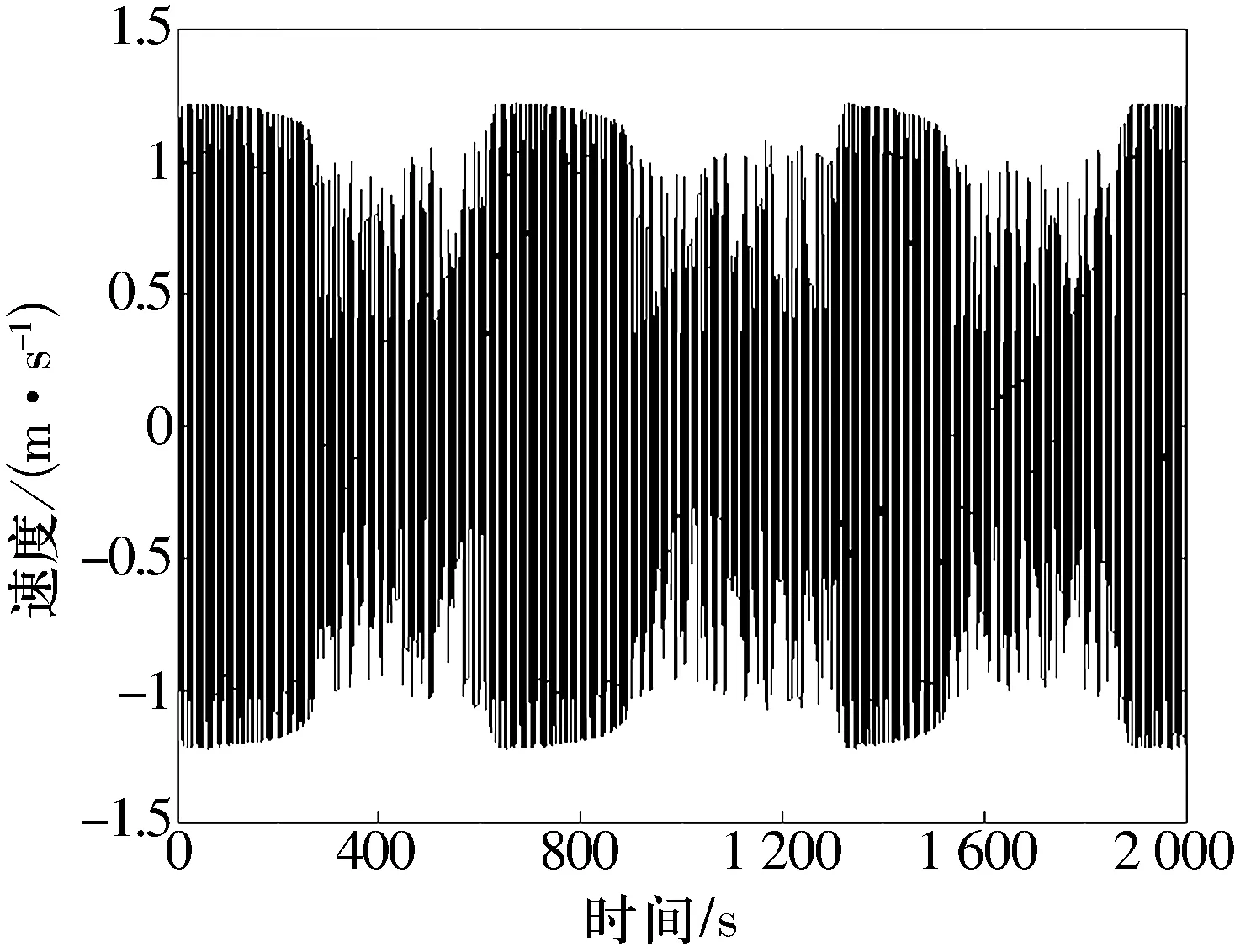
圖1 間歇混沌運(yùn)動(dòng)狀態(tài)圖
2 滾動(dòng)軸承故障分析
下面以6205軸承為例,分析其在1 797 r/min下的滾動(dòng)體故障。軸承損傷采用電火花加工而成,損傷直徑為0.711 2 mm,深度為3.810 mm,軸承故障數(shù)據(jù)的采樣頻率為12 kHz,軸承各部件的故障頻率如表1所示。
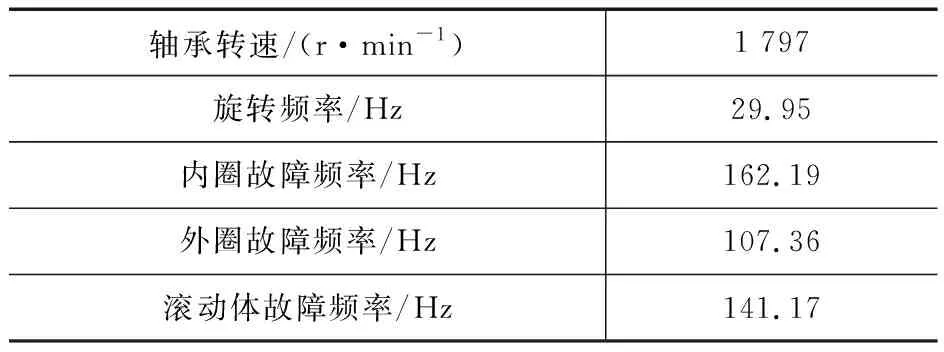
表1 軸承各部件的故障頻率
小波分析和混沌振子結(jié)合檢測(cè)滾動(dòng)軸承故障信號(hào)的基本原理如圖2所示。

圖2 檢測(cè)原理圖
滾動(dòng)體故障的原始數(shù)據(jù)時(shí)域圖如圖3所示。從表1的軸承故障數(shù)據(jù)中可以看出,其故障頻率點(diǎn)主要集中在低頻段,所以在處理數(shù)據(jù)時(shí)采用小波的多分辨率分析原理,應(yīng)用Daubechies小波對(duì)故障原始數(shù)據(jù)進(jìn)行6層分解,由于采樣頻率為12 kHz,故通過(guò)小波分解后留下94~187 Hz頻率的數(shù)據(jù)作為分析對(duì)象,其時(shí)域圖如圖4所示。再將分解后的信號(hào)輸入到混沌振子系統(tǒng)進(jìn)行頻率成分的識(shí)別。由于故障信號(hào)比較微弱(閾值為0.717),為了便于觀測(cè),在輸入混沌振子系統(tǒng)前可將小波處理后的故障信號(hào)適當(dāng)放大。在混沌振子系統(tǒng)的內(nèi)驅(qū)動(dòng)頻率為140 Hz和144 Hz時(shí),得到了間歇混沌運(yùn)動(dòng)現(xiàn)象,如圖5和圖6所示。
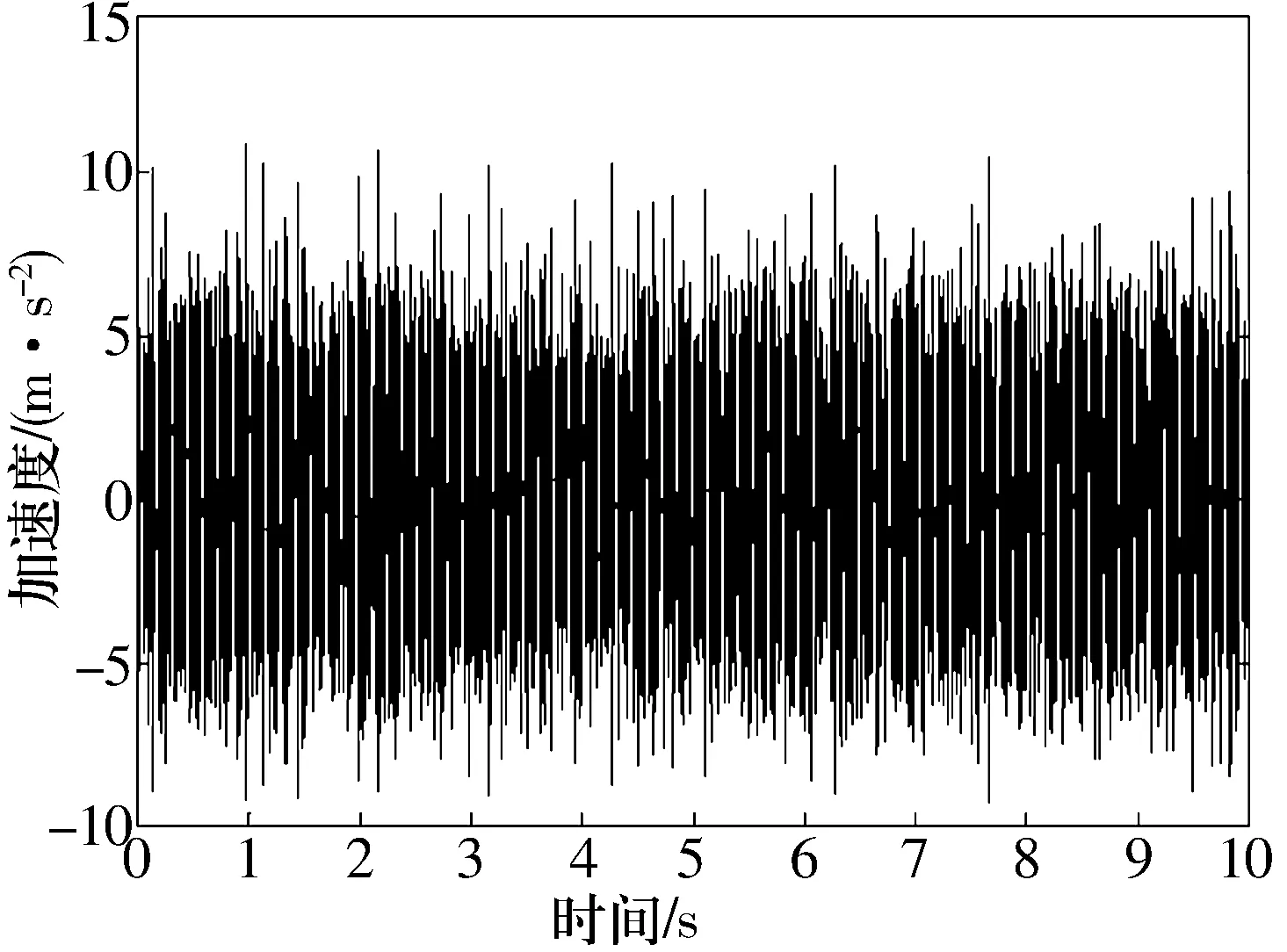
圖3 滾動(dòng)體故障的原始數(shù)據(jù)時(shí)域圖
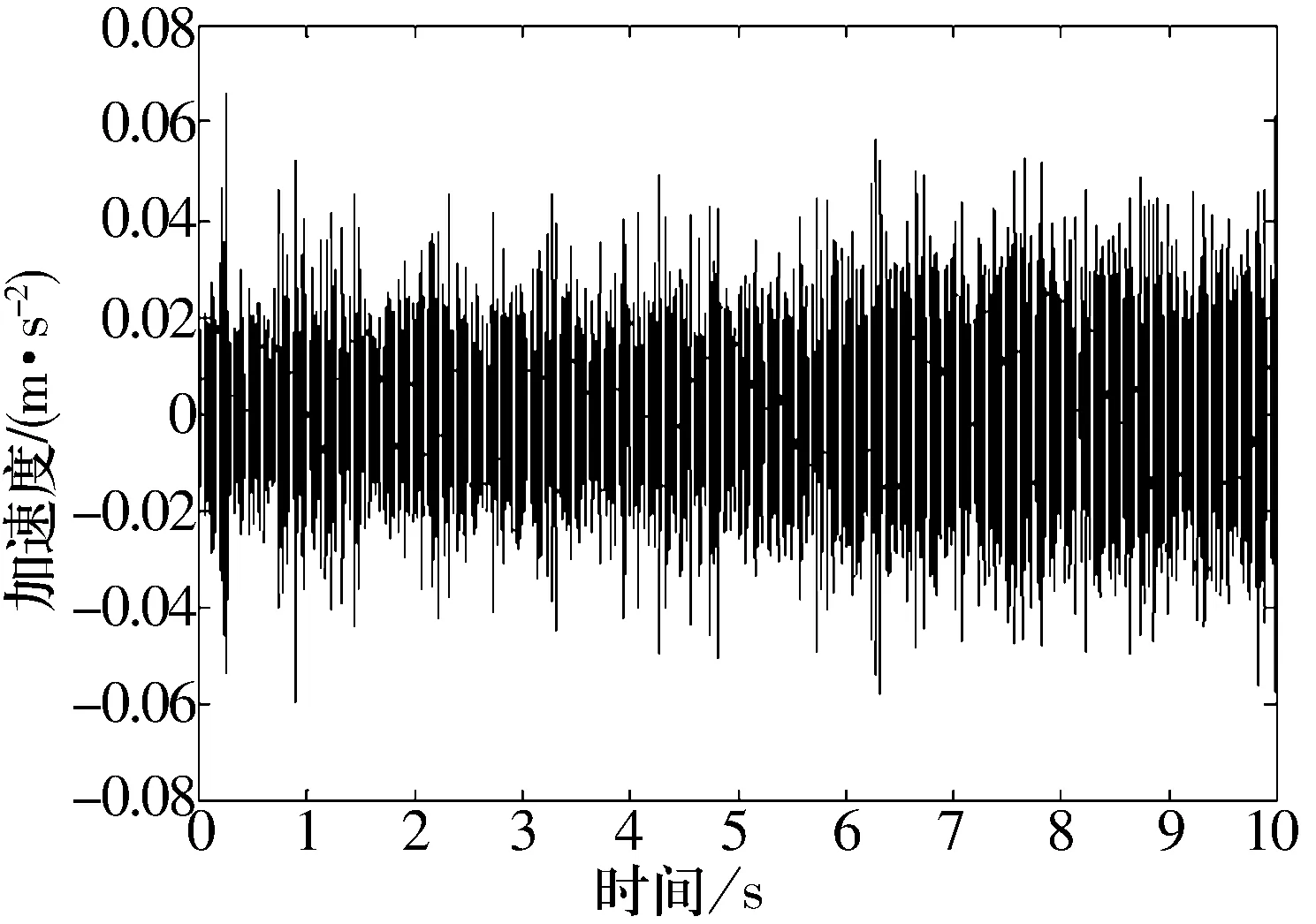
圖4 小波分解后時(shí)域圖
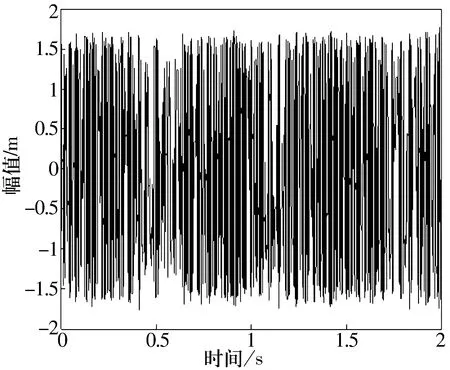
圖5 頻率140 Hz時(shí)的間歇混沌現(xiàn)象圖
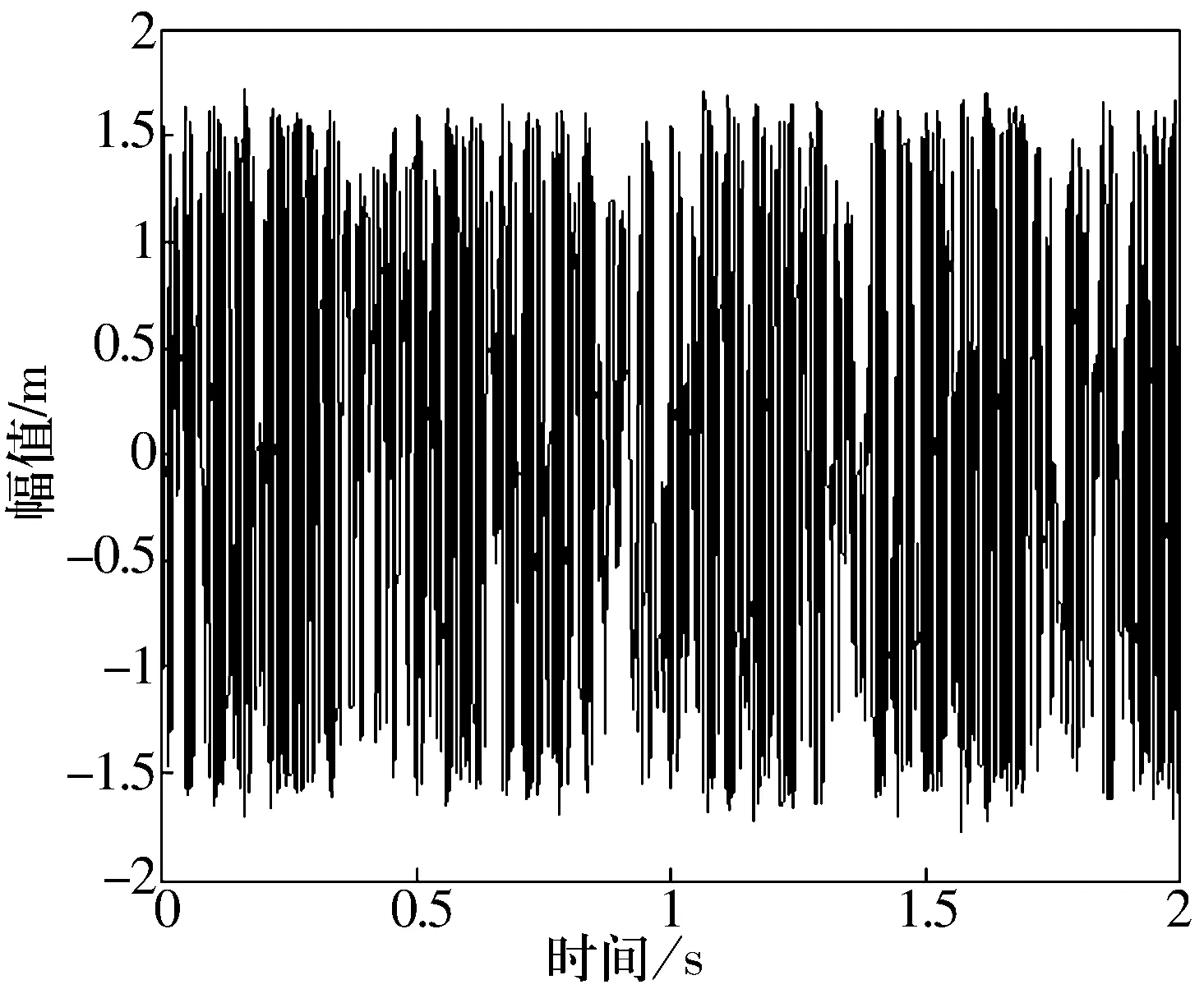
圖6 頻率144 Hz時(shí)的間歇混沌現(xiàn)象圖
在頻率為f1=140 Hz時(shí),間歇混沌周期ΔT1=0.636 2 s,Δf1=1/ΔT1=1.572 Hz;在頻率為f2=144 Hz時(shí),間歇混沌周期ΔT2=0.451 2 s,Δf2=1/ΔT2=2.216 Hz;通過(guò)混沌振子系統(tǒng)的間歇混沌運(yùn)動(dòng)現(xiàn)象檢測(cè)到的故障信號(hào)的頻率大小為:
與理論分析的軸承滾動(dòng)體故障頻率141.17 Hz比較接近,且誤差較小。通過(guò)以上分析可以判斷出此軸承有滾動(dòng)體故障出現(xiàn),同時(shí)證實(shí)了所提出的方法對(duì)滾動(dòng)軸承故障識(shí)別具有一定的可行性。
3 結(jié)束語(yǔ)
介紹了利用小波分析和混沌振子相結(jié)合診斷滾動(dòng)軸承故障的一種方法,分析了其基本原理及可行性,并通過(guò)試驗(yàn)證實(shí)了其具有較高的精度和可靠性。該方法具有簡(jiǎn)單、直觀、便于實(shí)現(xiàn)的特點(diǎn),在軸承故障診斷方面具有很好的應(yīng)用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
