一種改進的七電平逆變器對比仿真研究
2010-08-15 07:46:12孫長冬黃松清劉緒良謝玉干龍佼佼
電氣技術 2010年1期
孫長冬 黃松清 劉緒良 謝玉干 龍佼佼
(安徽工業大學電氣信息學院,安徽 馬鞍山 243002)
1 引言
近年來,多電平結構大量應用于高壓大功率等場合,主要是多電平逆變器由于其電平數多、開關頻率低、輸出諧波小等特點,因此越來越受到重視,并得到迅速發展。到目前為止,各國學者提出了大量的拓撲結構,歸納起來主要有三種:二極管鉗位型、飛躍電容型多電平逆變器、級聯型。
傳統的逆變器由于輸出的PWM脈沖波電平數很少,因此存在很高的電壓變化率和共模電壓,而且波形諧波含量較大,使得輸出濾波器的設計更加復雜。為了解決這些問題,發展了各種多電平逆變器電路。所謂多電平逆變器,就是采用多個直流電源和電力電子器件經過特定的拓撲變換,控制不同的直流電源輸出,將其組合成不同幅值的多電平交流輸出的功率變換裝置。這種逆變器在高壓大容量電力電子系統中發展迅速,成為電力電子領域新的研究熱點。自1980年日本學者A.Nabse提出三電平中點鉗位式逆變電路以來,經過多年的發展,現已形成鉗位型和級聯型兩大類多種樣式的多電平逆變器拓撲結構。豐富了多電平逆變電路的拓撲形式。
本文結合傳統兩電平逆變器和嵌位多電平逆變器的拓撲結構,取長補短,既采用了兩電平電路結構,也吸取三電平鉗位的優點,以及當今非對稱電路拓撲的研究的特性,提出本文所研究的七電平逆變器的拓撲結構,并對分析了電路的工作原理,通過Matlab對其仿真,用簡單的硬件電路驗證了分析和仿真的正確。此電路和三電平逆變器的單相所用的開關管數量相當,鉗位二極管減少,但是電平數增加到七電平。
2 電路拓撲
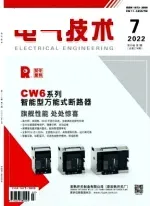
圖1給出了單相7電平逆變器的電路拓撲和5電平電路拓撲,7電平電路也正是在5電平電路的基礎之上,5電平工作過程見參考文獻[1],結合鉗位3電平逆變器,才產生的本文的研究電路拓撲,增加2個開關管,電平數也增加2個,控制方法大致相同。本文主要是對7電平逆變器進行分析和研究,左邊的7電平電路拓撲的前邊 Q3,Q4組成的橋是傳統的2電平單相橋,后邊的 Q5,Q6,Q7,Q8橋是鉗位3電平的單向橋,用 Q1,Q2對電源進行控制,通過對此拓撲進行適當的控制,產生期望的7電平。主要是通過控制開關的導通,讓電源疊加,產生7電平。7電平僅僅是將后板橋換成了鉗位3電平的形式,可以再換成鉗位5電平,可以產生11電平。依次類推可知,如果換成鉗位七電平逆變器的半橋可以產生15電平。同樣如果換成理想的鉗位N電平逆變器,可以產生(2N+1)個電平。電平數越高,需要的獨立電源也越多,控制也會變的更加復雜。
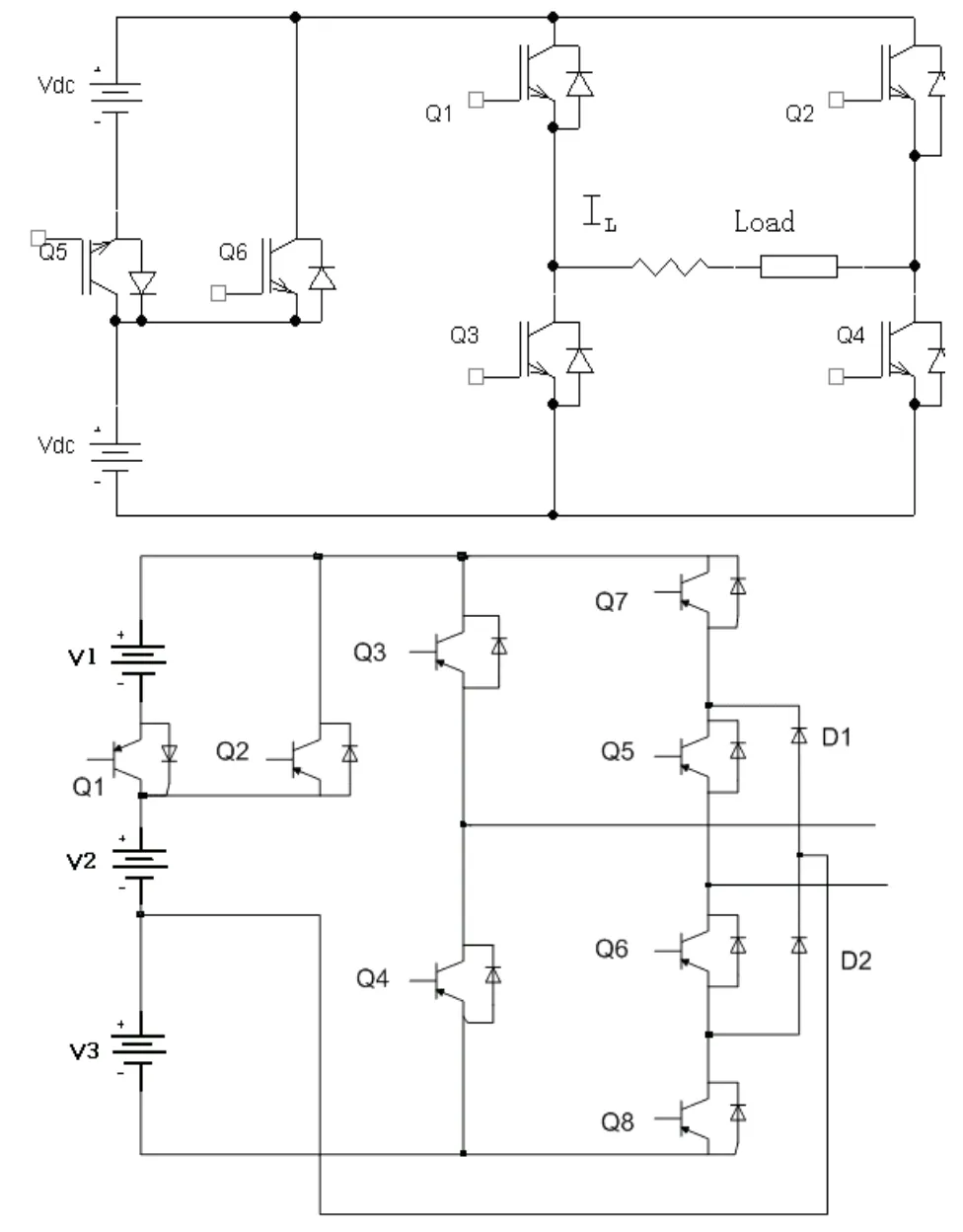
圖1 5電平逆變器電路拓撲和改進的7電平電路拓撲
3 拓撲的工作原理
5電平逆變器的工作原理在此就不再分析,重點分析7電平逆變器的工作原理,圖1有7種工作形式,本文主要對下面這7種工作狀態進行了分析和研究。
(1)第1種工作狀態,令Q3和Q6導通,其余的開關管關閉。電流從電源V2的正極開始,通過Q2的反并聯二極管,以及Q3和Q6,還有嵌位二極管D2形成電流回路,最后流回電源V2的負極。輸出電壓為+V2。
(2)第2種工作狀態,在Q3和Q6導通的基礎上,再令Q8導通,從電源V2的正極開始,通過這三個開關管,流回V3的負極,逆變器輸出電壓為+(V2+V3)。
(3)第3種工作狀態,在以上開關管導通的基礎之上,再打開Q1,電流從電源V1的正極開始通過Q1,Q3,Q6,Q8流回電源V3的負極,逆變器輸出電壓為+(V1+V2+V3)。
(4)第4種工作狀態,令Q2導通,其余的開關管都關閉,電流通過Q2,然后通過Q4,Q5,Q6的反并聯二極管,形成續流回路,此時輸出電壓為0,還有其他的0導通狀態,此處不再分析。
(5)第5種工作狀態,令Q4,Q5導通,其它開關都關閉,電流從V3的正極開始,通過鉗位二極管D1,以及Q4,Q5,最后流回V3的負極。逆變器輸出電壓為-V3。
(6)第6種工作狀態,在第5種工作狀態的基礎之上,再令Q7導通,電流從V2正極開始,經過Q2的反并聯二極管,再通過Q4,Q5,Q7流回電源V3的負極,逆變器輸出電壓為-(V2+V3)。
(7)第7種工作狀態,令Q1,Q4,Q5,Q7導通,其余都關閉,電流從電源V1的正極流出,通過Q1,Q4,Q5,Q7后,流回 V3的負極,逆變器輸出的電壓為-(V1+V2+V3)。
(8)第8種工作狀態,令Q2導通,其余開關管都關閉,形成電流的續流回路,逆變器輸出的電壓為0。
4 電路拓撲的控制原理
一種拓撲結構,必須采用合適的調制方法,才能得到期望的輸出,不同主電路結構的逆變器都對應有一定的調制方法。本文采用SHEPWM,作為該拓撲的調制方式。該方式的思想是通過傅里葉級數分析,得出特定開關角下的傅里葉級數展開式,然后令某些特定的低次諧波為零,從而得到一個反映N個開關角的N個非線性獨立方程,按求解的開關角進行控制,必定不含這些次數的諧波。通常這種方法著眼于低次諧波和低頻次非3倍次諧波。假設V1= V2= V3=E,圖2明顯滿足狄利克雷充分條件,又屬于1/4周期對稱的波形,所以傅里葉級數不存在余弦項和偶數諧波。于是可得

式中,uab是期望輸出的相電壓波形。
將式(1)展開,并解此積分,可得

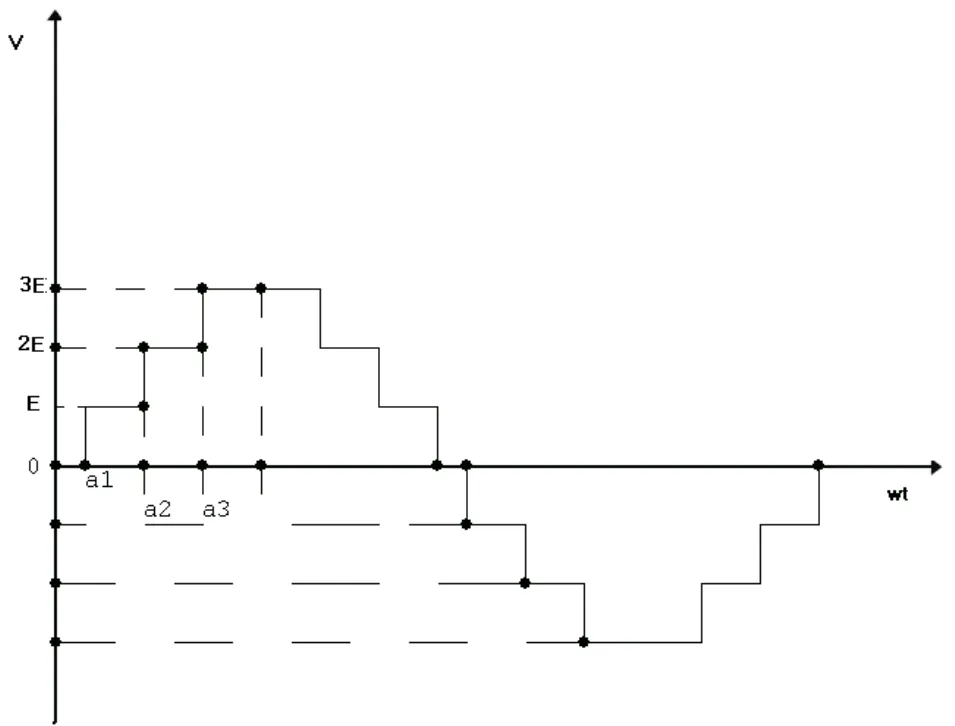
圖2 逆變器輸出電壓波形
令u=(-1)i+1cosnai為調制比,其值的大小決定了直流電壓利用率的大小。由式(2)可列出非線性方程為

根據式(3),并利用牛頓迭代法,即可解出a1、a2、a3的值,從而實現電路的SHEPEM控制。現利用Matlab7.1中的相關數學工具,解出了不同調制比下a1、a2、a3的值。算出角度后,用一個常量代替角度值,與固定周期的正弦波相交,就可以產生相對應的驅動波形。
5 仿真結果
圖3是通過Matlab6.5建立的系統仿真模型,a為5電平逆變器的仿真模型,b為7電平逆變器的仿真模型,每個直流電源的電壓為100V,5電平逆變器的最大直流電壓為400V而7電平逆變器的直流最大電壓為300V,設置頻率為50Hz,仿真結果如圖4。取了前0.1s的輸出波形。拓撲電路的驅動的搭建比較復雜,基本原理就是用正弦波和計算出來的具體角度值的差值,產生驅動。從輸出的仿真實驗結果可以看出,7電平逆變器的波形更加近似正弦波。能夠按照預期的控制方法輸出波形。

圖3
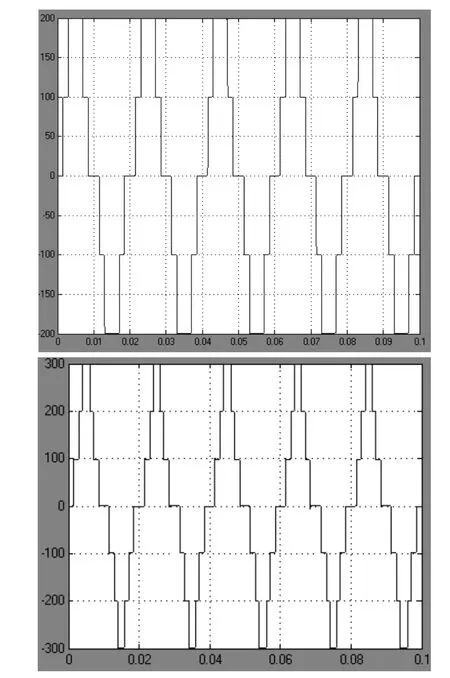
圖4 逆變器輸出電壓波形
6 結論
改電路是對原有的五電平逆變器電路拓撲的改進,控制思路簡單,產生的電平數高,通過了軟件仿真設計和單相電路的研究,三相電路的控制還在進一步的研究,實驗結果表明,這種電路能夠在控制合理的條件下正常工作,且輸出穩定。應用于大功率場合更能體現多電平的好處。
[1]MiroMilanovic,Franc Mihalic and Drago Dolinar.“Component Minimized Topology of DC to three-phase Inverter. World Scientific Publishing Company. 2004,13(4):863–875.
[2]李永東.大容量多電平逆變器-原理、控制、應用[M].北京:科技出版社, 2005.
[3]張艷莉,費萬民.三電平逆變器SHEPWM 方法及其應用研究[J].電工技術學報,2004,19(1):17-19.
[4]王兆安,黃俊.電力電子技術(第4版) [M].北京:機械工業出版社,2006.
[5]洪乃剛.電力電子和電力拖動控制系統的MATLAB仿真[M].北京:機械工業出版社,2006.