基于小波包分析的電機調(diào)速系統(tǒng)故障診斷與自動修正*
2010-08-28 07:07:30邱愛中
電機與控制應(yīng)用 2010年6期
邱愛中
(鄭州師范學(xué)院物理系,河南鄭州 450044)
0 引言
小波分析作為一種非平穩(wěn)信號的時頻域分析方法,既能夠反映信號的頻率信息,又能夠反映該頻率信息隨時間變化的規(guī)律,并且分辨率是可變的,所以利用小波分析提取故障的時域和頻域特征能實時診斷故障。文獻(xiàn)[1]利用小波變換的模極大值方法檢測工作軸承振動信號的突變故障。文獻(xiàn)[2]利用小波分析提取信號不同分辨率上的特征信息,并結(jié)合神經(jīng)網(wǎng)絡(luò)進(jìn)行模擬電路的故障診斷。文獻(xiàn)[3]分析了基于小波變換和支持向量機的故障診斷方法。文獻(xiàn)[4]將小波變換與模糊邏輯相結(jié)合用于電力傳輸線故障的診斷。這些處理方法有的針對故障簡單的信號處理,有的雖能處理復(fù)雜信號和系統(tǒng),但節(jié)點多,計算復(fù)雜,精度低;另外,針對電機調(diào)速系統(tǒng)的故障診斷和自動修正鮮有研究。
為解決以上問題,將小波包分析理論應(yīng)用于電機控制器故障檢測中,對被檢信號采用小波包分解和單節(jié)點重構(gòu)的改進(jìn)算法,細(xì)化信號的信息特征,提取小波包系數(shù)中所包含的時頻信息作為故障特征,構(gòu)建歸一化能量特征向量,并對比事先建立的故障辭典,判定輸出主電流﹑勵磁電壓和轉(zhuǎn)速的狀態(tài)出現(xiàn)的故障,再利用脈寬調(diào)制(Pulse Width Modulation,PWM)技術(shù),自動修正控制輸出,提高調(diào)速精度和抗干擾性能。
1 設(shè)計原理
設(shè)計的思想依據(jù)是小波包理論。故障診斷和自動修正兩大功能的實現(xiàn)主要由以下七個步驟來完成。
(1)對被檢測信號采樣,進(jìn)行小波包分解。
設(shè)被檢測的電壓信號為U(t),通過對應(yīng)的前置濾波器,模數(shù)轉(zhuǎn)換后的離散信號為U(T),Pj,i(T)表示第j層上第i個小波包,稱為小波包系數(shù)。G、H為小波共軛正交鏡像濾波器,H與尺度函數(shù)φi(t)有關(guān),G與小波函數(shù)Ψj(t)有關(guān)。小波包的算法為

其中:T=1,2,…,2J-j;i=1,2,…,2j;J=log2N。
信號U(T)在第j層上共有2j個小波包,經(jīng)過小波共軛正交鏡像濾波器H、G,能把所檢測到的電壓故障信號非常完整地劃分到不同的頻段內(nèi),實現(xiàn)故障的小波包分解[5-6]。
(2)使用改進(jìn)算法,消除頻率混淆。
為了解決子帶中的頻率交錯和各子帶中的虛假頻率分量,避免頻率混疊,采用小波包分解和單節(jié)點重構(gòu)的改進(jìn)算法,即在前面的基礎(chǔ)上再引出兩個算子A和B。設(shè)x(n)表示2j尺度上低頻子帶小波包系數(shù),且W=e-j2π/Nj。

式(2)、(3)作為算子A的輸出;Nj表示2尺度的數(shù)據(jù)長度;k=0,1,…,Nj-1。
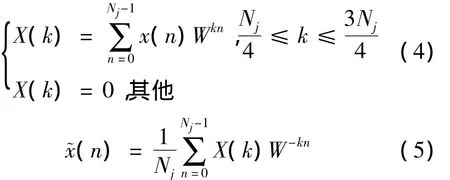
式(4)、(5)作為算子B的輸出,采取該方法能有效消除頻率混淆。
(3)求各個子帶內(nèi)的能量特征值,初步建立故障能量特征向量。
為了更加方便和準(zhǔn)確地判定故障類型,計算分解后各頻段內(nèi)信號的能量。選取各個子帶內(nèi)信號的平方和作為能量的標(biāo)志,第j層第i個小波包分解后在各個頻段內(nèi)的能量為

式中:ek(i)——重構(gòu)信號離散點的幅值。
以各個子帶內(nèi)的能量元素構(gòu)建故障特征向量T,用能量特征向量反映故障在時域和頻域的信號信息。

(4)對樣本空間統(tǒng)計平均,精確能量特征向量值。
為了減小誤差,在建立故障特征向量時進(jìn)行了多次測量,建立故障的試驗數(shù)據(jù)樣本,并對其統(tǒng)計平均。假設(shè)n次測量,特征向量的特征元素值為sk,統(tǒng)計平均值為

Ck容差范圍參量ΔCk作為元素構(gòu)成誤差判別向量ΔET:

式中:K——容差系數(shù);
σ——樣本標(biāo)準(zhǔn)差。
(5)改造故障的歸一化能量特征向量。
為了便于數(shù)據(jù)分析,提高運算速度和準(zhǔn)確性,再進(jìn)行歸一化改造處理:

即構(gòu)成了新的特征向量:

經(jīng)過處理,信號故障特征更加明顯。由于把故障特征從高維到低維空間壓縮,建立了歸一化能量特征向量ET,減少了輸入節(jié)點,降低了計算復(fù)雜度,加快了收斂速度,提高了診斷的實時性和準(zhǔn)確率。
(6)故障辭典的建立。
確定電機常見故障與能量特征向量和自動修正措施的一一映射關(guān)系,將該對應(yīng)關(guān)系制成故障查詢辭典儲存在單片機外設(shè)的存儲器中,以便在電機和控制器運行當(dāng)中識別故障,顯示診斷結(jié)果,實現(xiàn)自動校正。本文選擇三項作為闡述重點:①晶閘管或者整流二極管故障引起輸出電流只有正常輸出的一半;②周圍空間電場磁場干擾;③輸入電壓波動。以上三項由系統(tǒng)自動調(diào)節(jié)。
(7)調(diào)節(jié)修正。
對應(yīng)事先建立的故障詞典和校正方案,通過PWM校正網(wǎng)絡(luò)輸出PWM波控制晶閘管的通斷,來調(diào)節(jié)加在電機繞組上的電壓,確保輸出的穩(wěn)定性和精確性。
2 系統(tǒng)結(jié)構(gòu)
該控制系統(tǒng)以80C196KC單片機為控制核心。外擴的存儲器連接在80C196KC自帶的P3、P4口,串行通信管腳接MAX485與外界串行連接,預(yù)留的PI部分管腳可以作控制命令輸入接口,其結(jié)構(gòu)框圖如圖1所示。
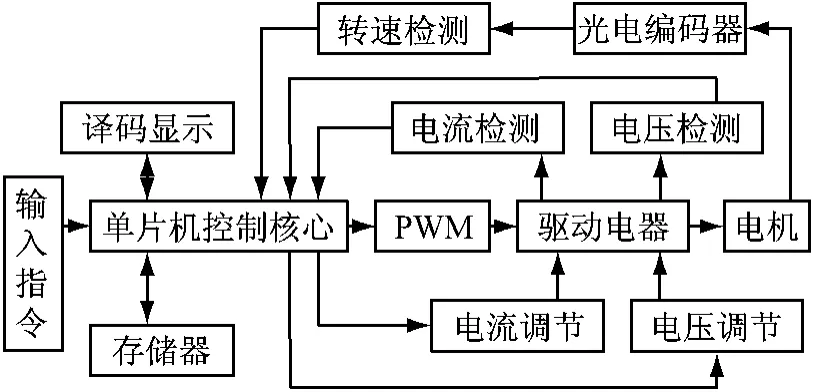
圖1 自動檢錯修正的電機調(diào)速控制系統(tǒng)結(jié)構(gòu)框圖
整個系統(tǒng)的工作流程如下:電機電樞電流﹑勵磁電壓經(jīng)過電流和電壓傳感器反饋給80C196KC,電機轉(zhuǎn)速通過光電編碼器測速后反饋到80C196KC的高速輸入口,組成反饋系統(tǒng)。在80C196KC中對反饋信號進(jìn)行處理,與給定的標(biāo)準(zhǔn)規(guī)定值比較,判斷是否有異常,并識別故障的來源,給出合適的控制量到高速輸出口,輸出調(diào)節(jié)校正脈沖信號經(jīng)過光耦隔離和晶閘管驅(qū)動來調(diào)節(jié)電機的轉(zhuǎn)速。
電流檢測電路選用型號為CSM050NPT的霍爾傳感器,傳感器輸出信號送入單片機。電壓檢測電路主要由電阻R和電容C組成的端電壓分壓及濾波電路組成,再輸入到單片機進(jìn)行數(shù)據(jù)讀取。速度檢測采用光電編碼器將電機轉(zhuǎn)速轉(zhuǎn)換成電信號后,送單片機的HSI口,檢測電機轉(zhuǎn)速。
設(shè)計的電壓調(diào)節(jié)電路輸入端有給定電壓、負(fù)反饋電壓、電流正反饋電壓疊加,使裝置的穩(wěn)定性快速達(dá)到最佳狀態(tài)。在供電電壓和負(fù)載波動時,及時自動調(diào)節(jié)輸出電壓,使電機轉(zhuǎn)速保持穩(wěn)定。電流調(diào)節(jié)器限定了最大輸出電流,在電機滿負(fù)載、全起動時,電流控制在額定值以內(nèi),使電機快速,平穩(wěn)起動;當(dāng)負(fù)載增加時,使輸出電壓平穩(wěn)下降,從而使輸出電流不再上升超過限定電流。
該裝置參數(shù)如下:輸入電壓為單相交流220 V±10%;直流電樞輸出電壓為0~180 V,勵磁輸出電壓為180~220 V;電樞輸出電流為40 A。
3 試驗運行結(jié)果及分析
對該控制系統(tǒng)進(jìn)行了開環(huán)運行和閉環(huán)運行試驗。系統(tǒng)開環(huán)運行調(diào)速特性基本保持線性,說明與理論分析相吻合,符合設(shè)計要求。保持速度給定不變,調(diào)節(jié)系統(tǒng)負(fù)載,得到加入閉環(huán)調(diào)節(jié)后調(diào)速系統(tǒng)的靜特性曲線,顯示調(diào)速特性的硬度較好。由儀表測得該調(diào)速器的最大超調(diào)量不超過2.7%,說明其調(diào)速精度較高。
為了進(jìn)一步檢驗該控制器與普通PID控制器的性能差異,在如下方面與普通PID控制器進(jìn)行了試驗比較。
(1)對晶閘管或者整流二極管故障處理對比。
圖2是自動修正控制系統(tǒng)對遇到的晶閘管或者整流二極管故障處理的輸出電流曲線,輸出電流突然降低到正常輸出的一半,系統(tǒng)能夠自動識別故障,并校正至正常輸出。圖3是常規(guī)控制系統(tǒng)對故障處理的輸出電流曲線,而常規(guī)PID控制器只能修正到25 A附近。
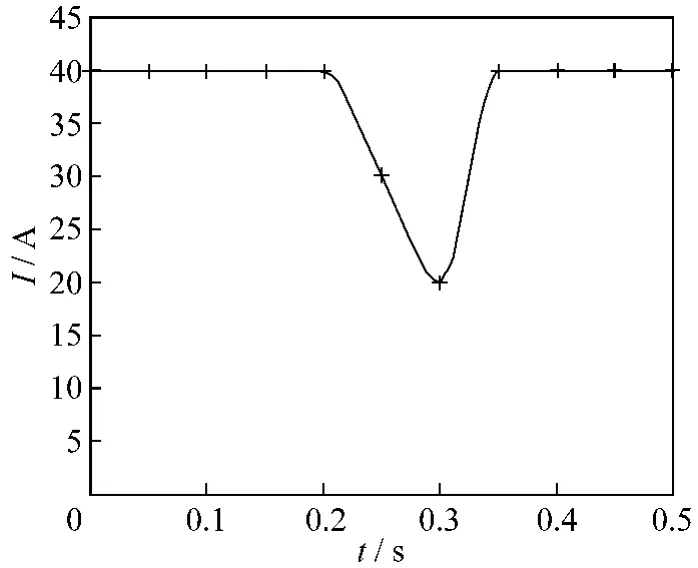
圖2 自動修正控制器對故障處理的輸出電流曲線
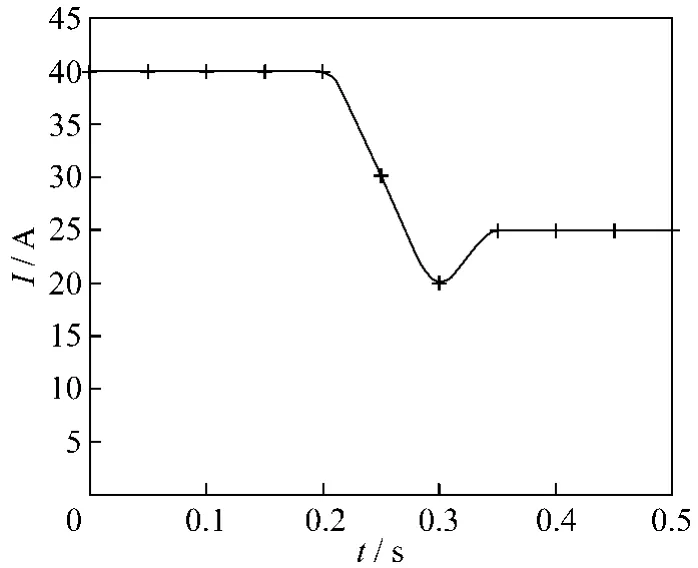
圖3 常規(guī)控制器對故障處理的輸出電流曲線
(2)電磁干擾情況下輸出電流的變化對比。
在電機正常運轉(zhuǎn)情況下,突然加入人為設(shè)置的加性單頻電磁干擾,測到電機控制器的電流輸出波形。圖4為普通控制器的電流輸出波形,電流受到干擾后有波動,數(shù)值為38.9~41.3 A;圖5為自動修正調(diào)速器的電流輸出波形,受干擾后數(shù)值能迅速恢復(fù)穩(wěn)定在40 A。
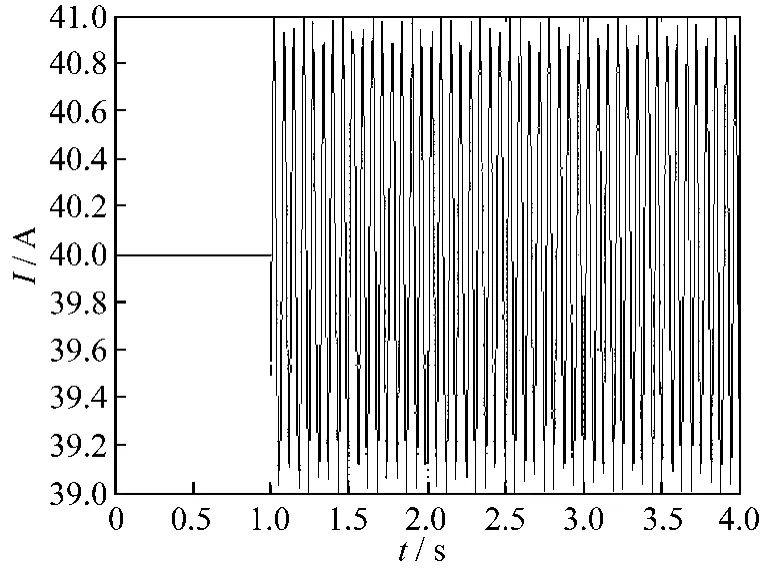
圖4 加性單頻電磁干擾下普通控制器輸出電流

圖5 加性單頻電磁干擾下自動修正調(diào)速器輸出電流
(3)抗輸入電壓波動性能比較。
對比了兩種控制器的抗輸入電壓波動性能。圖6為采用普通控制時,在t1=0 s至t2=1.2 s時間內(nèi)輸入端不斷疊加0~20 V線性電壓下的轉(zhuǎn)速響應(yīng)曲線(時間起點為t=0 s)。圖7為采用該自動修正控制系統(tǒng)時,在t=0 s至t=1.2 s時間內(nèi)輸入端不斷疊加0~20 V線性電壓下的轉(zhuǎn)速響應(yīng)曲線(時間起點為t=0 s)。

圖6 普通控制器輸入端加線性電壓時速轉(zhuǎn)曲線
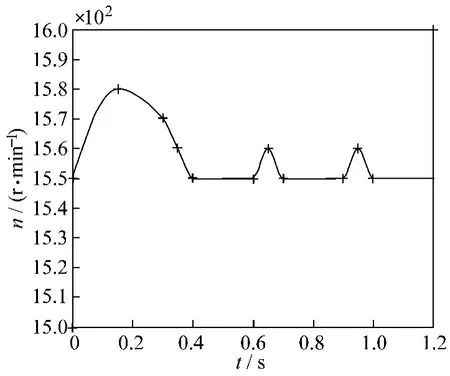
圖7 自動修正調(diào)速器輸入端加線性電壓時轉(zhuǎn)速曲線
從圖6、7可看出:普通PID控制電機輸入端突加線性電壓引起電壓波動時速度變化較大,恢復(fù)時間較長,抗干擾性能較差;采用該自動檢錯修正的調(diào)速系統(tǒng)控制電機完全可以達(dá)到無超調(diào),突加線性電壓電機速度變化較小,抗干擾能力很強,其性能明顯優(yōu)于傳統(tǒng)的PID控制,該自動修正的調(diào)速系統(tǒng)控制電機伺服系統(tǒng)具有優(yōu)良的靜態(tài)和動態(tài)性能。
4 結(jié)語
本文介紹了采用小波包分析技術(shù)診斷故障,采用PWM技術(shù)校正電機轉(zhuǎn)速,研制了自動檢錯修正的電機調(diào)速系統(tǒng)。試驗結(jié)果表明:該自動檢測校正的調(diào)速系統(tǒng)具有抗干擾性強、調(diào)速精度高、轉(zhuǎn)速平穩(wěn)等特點,能大大改善調(diào)速系統(tǒng)的靜態(tài)、動態(tài)性能,表現(xiàn)優(yōu)良的控制效果。該系統(tǒng)具有對異常輸入電壓有較強的魯棒性等特點,該故障診斷和轉(zhuǎn)速自動修正的方法具有廣闊的應(yīng)用前景。
[1]Sun Q,Tang Y.Singularity analysis using continuous wavelet transform for bearing fault diagnosis[J].Mechanical Systems and Signal Processing,2002,16(6):1025-1041.
[2]Tan Yang Hong,Ye Jia Zhuo.Wavelet method for fault diagnosis of analogue circuits[J].Journal of Electronics and Information Technology,2006,28(9):1748-1751.
[3]Parikh U B,Das B,Maheshwari R P.Combined wavelet SVM technique for fault zone detection in a series compensated transmission line[J].IEEE Transactions on Power Delivery,2008,23(4):1789-1794.
[4]Jayabharata R M,Mohanta D K.A wavelet-fuzzy combined approach for classification and location of transmission line faults[J].Electrical Power and Energy Systems,2007,29(9):669-678.
[5]王芳,魯順昌.基于小波包分析的電機故障檢測[J].電機與控制應(yīng)用,2008,35(7):53-56.
[6]楊建國.小波分析及工程應(yīng)用[M].北京:機械工業(yè)出版社,2005.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34