帶參數擾動的永磁同步電動機混沌系統的魯棒自適應主動控制
2010-09-07 07:31:32李鐘慎傅桂元
華僑大學學報(自然科學版) 2010年6期
李鐘慎,傅桂元
(華僑大學機電及自動化學院,福建泉州362021)
帶參數擾動的永磁同步電動機混沌系統的魯棒自適應主動控制
李鐘慎,傅桂元
(華僑大學機電及自動化學院,福建泉州362021)
基于自適應主動控制,提出一種魯棒控制方法,通過估計不確定性系統參數的上、下界限,設計自適應主動控制器.同時,給出具體的理論推導及穩定性分析.該方法可以有效消除系統參數擾動的影響,從而實現使永磁同步電機各狀態變量能被鎮定到任意點,以及輸出能漸近跟蹤任意期望軌道.數值仿真結果驗證了方法的有效性及魯棒性.
永磁同步電動機;自適應主動控制;參數擾動;混沌控制;魯棒性
永磁同步電動機(PM SM)在一定條件下將呈現出混沌特性,主要表現為轉矩和轉速的間歇振蕩、控制性能的不穩定、系統不規則的電流噪聲等[1-2].這對于永磁同步電動機穩定運行極為不利,甚至將引入整個驅動系統的損壞.因此,永磁同步電動機的混沌控制研究具有很大的實際意義.目前,實現對永磁同步電動機的混沌控制的方法,主要有自適應反步法[3]、主動反步法[4]、無源控制方法[5]、自適應動態面方法[6]、Lyapunov指數方法[7]、基于模糊控制的自適應滑模控制[8]、有限時間理論[9]和LaSalle不變集原理[10]等.但是,上述各方法中均沒有考慮系統受到參數擾動或是外部不確定性因素的情況.在實際應用中,應避免受到各種干擾等不確定性因素的影響,因此,研究具有參數擾動不確定性的永磁同步電動機的混沌控制問題具有較大的實際應用價值.文[11]提出一種基于線性反饋方法實現對永磁同步電動機的鎮定及跟蹤控制,并且分析了系統存在模型誤差及測量噪聲情況下的魯棒性.但該方法將永磁同步電動機混沌模型中的兩個狀態量(分別d,q軸電流)用自定義的兩個狀態變量來表示,顯然在實際應用當中要受到很大的限制.本文設計基于自適應主動控制的自適應魯棒控制器,實現對具有參數擾動的不確定性PM SM混沌系統的魯棒控制.
1 永磁同步電動機的混沌模型
由文[1-2]可知,永磁同步電動機混沌系統的數學模型為
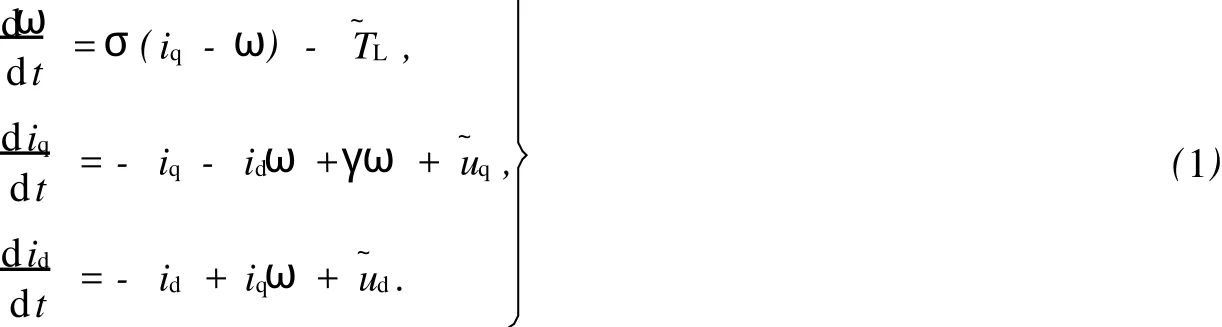
式(1)中:狀態變量ω,i,i分別表示電動機的轉子角速度、定子d,q的軸電流;~T,~u,~u分別為負載轉
dqLqd矩、定子d,q的軸電壓.這里,只考慮系統沒有受到驅動負載的情況,即~u=~u=~T=0.此時,系統(1)
可以寫成如下形式,即
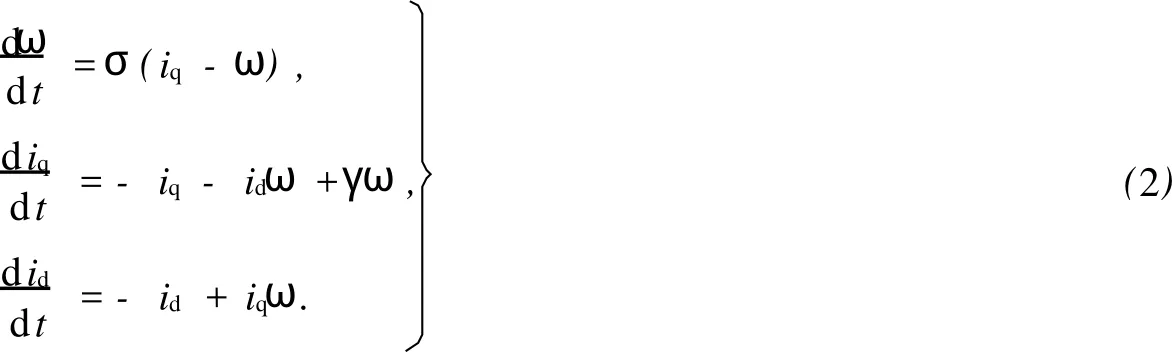
由文[2]可知,當參數σ=5.46,γ=20時,系統(2)將呈現出混沌特性.然而,實際模型中的系統(2)的參數σ,γ將會受到各種環境因素的影響,因而含有各種不確定性.考慮被控系統(2)帶有參數擾動情況時,其表述為

式(3)中:Δσ,Δγ分別表示系統參數的擾動項;變量y為系統(3)的輸出量;u=[u1,u2,u3]T為系統的控制輸入.控制目標首先是使帶有參數擾動的被控系統(3)的各狀態變量穩定到任一點,其次是使系統的輸出能快速跟蹤到期望軌道.
2 控制器的設計
2.1 鎮定問題
假定被控永磁同步電動機的各狀態變量的期望值為[ωr,iq,r,id,r],則系統的各狀態誤差分別為e1= ω-ωr,e2=iq,iq,r,e3=id,id,r.不失一般性,為了便于分析,取系統的狀態原點作為各狀態變量的期望值,即[ωr,iq,r,id,r]=[0,0,0].則系統動態誤差方程為

系統的控制目標是使式(4)中的各狀態變量滿足
考慮帶有擾動項的系統參數為時變,即σ(t)=σ+Δσ,γ(t)=γ+Δγ.假定σ(t)∈[σ,σˉ],γ(t)∈[γ, ˉγ].將被控系統(4)寫成矩陣形式,則有

式(5)中:矩陣A為系統確定性參數;ΔA為系統參數擾動量;f(x)為系統的非線性向量函數,u為系統的控制向量組,其值分別如下


此時,系統(4)可以看成是一時變的線性系統.不失一般性地,可以假定V=Pe,其中P是一個3×3的矩陣.則式(7)可改為漸近趨于零.


4 結束語
提出一種魯棒控制方法,實現對具有參數擾動的不確定性PM SM混沌系統的鎮定及跟蹤.采用自適應主動控制,通過估計不確定性參數的上、下限,設計魯棒控制器,有效消除了被控系統中參數擾動的影響,并給出了具體的設計步驟及理論推導.該方法適應性廣,設計的控制器簡單易行.
[1] L IZhong,PARK J B,ZHANGBo,et al.Bifurcations and chaos in a permanentmagnet synchronousmo to r[J].IEEE Trans Circ Sys(Ⅰ),2002,49(3):383-387.
[2] 張波,李忠,毛宗源.永磁同步電動機的混沌模型及其模糊建模[J].控制理論與應用,2002,19(6):841-844.
[3] GE Xiao-hui,HUANGJin.Chaos controlof permanentmagnet synchronousmotor[C]∥Proc of the 8th International Conf Electrical Machines and Systems.Nanjing:[s.n.],2005:484-488.
[4] 李鐘慎,魏劍林,王永初.利用Backstepping方法的PMSM混沌運動的控制[J].華僑大學學報:自然科學版,2009, 30(3):253-256.
[5] Q IDong-lian,WANGJia-jun,ZHAO Guang-zhou.Passive control of permanent magnet synchronousmotor chaotic systems[J].J Zhejiang Univ Sci(A),2005,6(7):728-732.
[6] W EID Q,LUO X S,WANGB H,et al.Robust adap tive dynamic surface controlof chaos in permanentmagnet synchronousmoto r[J].Phys Lett(A),2007,363(1/2):71-77.
[7] ZRIB IM,OTEAFY A,SMAOU IN.Controlling chaos in the permanent magnet synchronous moto r[J].Chaos, Solitons and Fractals,2009,41(3):1266-1276.
[8] POURSAMAD A,MARKAZIA H D.Adap tive fuzzy sliding-mode control formulti-inputmulti-output chaotic system s[J].Chaos,Solitons and Fractals,2009,42(5):3100-3109.
[9] WEIDu-qu,ZHANGBo.Controlling chaos in permanent magnet synchronous moto r based on finite-time stability theo ry[J].Chinese Physics(B),2009,18(4):1399-1403.
[10] 韋篤取,羅曉曙,丘東元,等.基于LaSalle不變集定理自適應控制永磁同步電動機的混沌運動[J].物理學報, 2009,58(9):6026-6029.
[11] REN H,L IU D.Nonlinear feedback controlof chaos in permanentmagnet synchronousmoto r[J].IEEE Trans Circuits Syst(Ⅱ),2006,53(1):45-50.
Robust and Adaptive Active Control of the Chaotic System in Permanen t Magnet Synchronous M otor with Parameters Perturbation
L IZhong-shen,FU Gui-yuan
(College of Mechanical Engineering and Automation,Huaqiao University,Quanzhou 362021,China)
A robust controlmethod is p roposed and the bounds of the uncertain system parameters are estimated based on adap tive active control so that the adap tive active controller could be designed.Meanw hile,the detailed theo retical derivation and stability analysis is given.The controlmethod can effectively eliminate the influence of the system parameters perturbation,and each state of PMSM can be driven to any user-defined point and the outputs can asymp totically track any desired orbit.The resultsof numerical simulation have show n that the effectiveness and robustness of the p roposed control scheme.
permanentmagnet synchronousmotor;adap tive active control;parametersperturbation;chaotic control;robustness
TM 351.012;TP 273+.2;O 415.5
A
(責任編輯:陳志賢 英文審校:鄭亞青)
1000-5013(2010)06-0615-05
2010-01-11
李鐘慎(1971-),男,教授,主要從事最優控制、時滯系統的控制、抗飽和控制的研究.E-mail:lzscyw@hqu. edu.cn.
福建省自然科學基金計劃資助項目(E0710018)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12