礦井交流提升機新型動力制動電源探析
2010-09-08 06:44:36薛峰
中國新技術(shù)新產(chǎn)品 2010年10期
薛峰
(內(nèi)蒙古科技大學,內(nèi)蒙古 包頭 014010)
1 引言
長期以來,動力制動是國內(nèi)礦井交流提升機廣泛采用的電氣制動方式之一,礦井提升機是煤炭、冶金、有色和黃金等礦山生產(chǎn)過程中非常重要的設(shè)備。全國在用的礦井提升機,僅煤炭行業(yè)統(tǒng)配礦就有上萬多套,冶金、有色和黃金等行業(yè)的使用量也十分可觀。由于歷史的原因,這些提升機所用的電氣控制設(shè)備普遍存在技術(shù)落后、結(jié)構(gòu)龐大、連線復雜、故障率高、使用維護難度大等問題,直接影響了礦井提升機的安全和效率,也阻礙了礦井自動化和管理現(xiàn)代化的步伐,急需采用現(xiàn)代高新技術(shù)設(shè)備來更新?lián)Q代,也是廣大現(xiàn)場使用維護人員迫切要解決的技術(shù)問題。
雖然自動晶閘管控制動力制動電源發(fā)展己經(jīng)成熟,也得到了一定的應用,但是由于晶閘管是半控型器件,因此控制效果往往不太理想,同時由于使用了低頻變壓器,從而使整個控制設(shè)備體積龐大。
2 礦井提升機動力制動
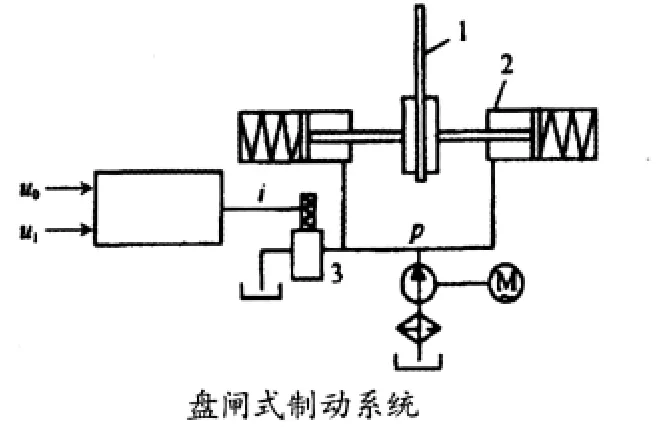
2.1 礦井提升機盤閘式制動
盤閘式制動系統(tǒng)如下圖所示,是通過給定速度信號和實際速度信號比較,經(jīng)磁放大器綜合、放大,來調(diào)節(jié)電液調(diào)壓裝置輸入電流的,達到改變油壓的目的。本系統(tǒng)中越大,盤形閘和制動盤的壓力越小,制動力矩越小。可以看出,它是將機-電-液融為一體,環(huán)節(jié)多,慣性大。最為明顯的是該制動為能耗制動,又有閘瓦磨損,經(jīng)濟性差。
2.2 礦井提升機動力制動
礦井提升機電力拖動系統(tǒng)的結(jié)構(gòu)如下圖所示
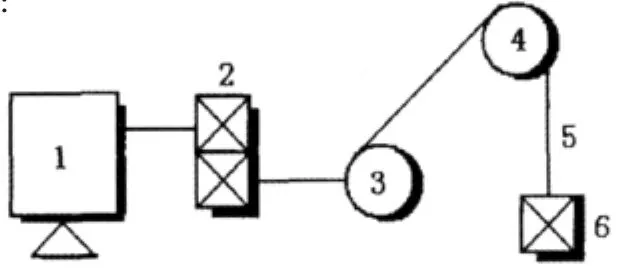
礦井提升系統(tǒng)
電動機正常運行時,電動機定子回路通入的是三相交流電,在電動機轉(zhuǎn)子旋轉(zhuǎn)時,切斷定子交流電源,然后輸入直流電,此時,當電動機定子繞組中將形成一個靜止的定子磁場,這個磁場在旋轉(zhuǎn)的轉(zhuǎn)子繞組內(nèi)感應電動勢,并由此產(chǎn)生轉(zhuǎn)子電流。靜止的定子磁勢與轉(zhuǎn)子電流磁勢形成的合成氣隙磁通與轉(zhuǎn)子電流相互作用,產(chǎn)生制動力矩,電動機進入制動工作狀態(tài),這種制動方式稱為動力制動。動力制動過程中,定子磁場是靜止的,轉(zhuǎn)子速度就是轉(zhuǎn)子導體切割磁力線的速度。
3 系統(tǒng)的組成框圖及工作原理
該系統(tǒng)的基本工作原理是:三相工業(yè)電源首先經(jīng)過一次不可控整流,得到較為粗糙的一次直流,然后經(jīng)過PWM斬波控制,得到高質(zhì)量可調(diào)的二次直流電,再經(jīng)過變壓器變壓后就可以得到所需要的直流電。當提升機進行制動時,通過切除三相異步電機的定子交流電的同時,加入上述的二次直流電,進行能耗制動。本方案采用速度與電流雙閉環(huán)的形式進行控制,來提高控制效果和精度。整個系統(tǒng)框圖如下所示。
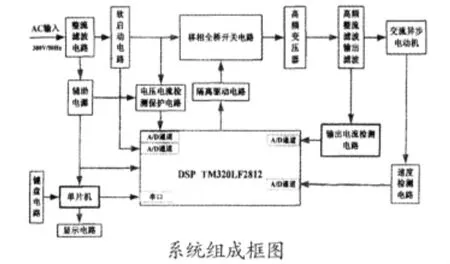
一次整流包括系統(tǒng)的輸入電路、全橋整流器等,主要完成交流電網(wǎng)電壓的整流功能,使交流電變?yōu)檩^為粗糙的直流電。輸入整流濾波器將輸入電壓進行整流濾波,因此整個系統(tǒng)的變壓器、輸出濾波器等部分的體積與傳統(tǒng)的相控整流裝置都要小的多。濾波品質(zhì)的高低直接關(guān)系到輸出直流電中交流分量的高低,即波紋系數(shù),這項參數(shù)越小越好。另外濾波電容的容量和品質(zhì)也關(guān)系到電流變化時電壓的穩(wěn)定程度。輔助電源為IGBT的控制電路、驅(qū)動電路、保護電路、各種傳感器、控制系統(tǒng)等提供彼此隔離的且滿足一定技術(shù)要求的直流電壓,保證它們正常可靠的工作。該系統(tǒng)的輔助電源采用的是穩(wěn)壓芯片來得到控制系統(tǒng)所需要的電壓。
PWM發(fā)生電路接收保護控制電路的信號,產(chǎn)生脈沖信號,通過驅(qū)動電路驅(qū)動IGB通斷的頻率,從而來控制高頻逆變環(huán)節(jié)工作時的占空比,使開關(guān)電源即使處于不同的負載下,也能通過反饋來調(diào)節(jié)占空比來維持輸出電壓的穩(wěn)定。保護控制電路檢測系統(tǒng)的輸出電壓和電流,和參考電壓電流相比較,產(chǎn)生誤差信號,送給PWM產(chǎn)生電路,即調(diào)整輸出脈沖的寬度,從而達到控制系統(tǒng)占空比的目的。同時當系統(tǒng)的輸入輸出產(chǎn)生錯誤,比如過壓、過流、缺相等,可以立刻封閉脈沖產(chǎn)生信號,使系統(tǒng)停止工作,達到保護系統(tǒng)的目的。
4 速度檢測電路設(shè)計
對電機的速度進行測量的方法主要有兩種,一種是采用測速發(fā)電機,另一種是采用光電編碼器。采用測速發(fā)電機測速存在非線性和死區(qū)問題且精度較差,需要的外圍硬件電路較多;而采用光電編碼器則可達到較高的測量精度,不易受外界環(huán)境的影響;本設(shè)計中采用的是增量式光電編碼器,輸出的兩路脈沖信號加到TMS320F2812的QEP3和QEP4引腳上,通過測得的脈沖個數(shù)很容易就能算出電機轉(zhuǎn)速,同時還可以根據(jù)兩路脈沖的先后順序確定出電機的轉(zhuǎn)向。
5 電流檢測調(diào)理電路的設(shè)計
在本論文所設(shè)計的系統(tǒng)中,電流的檢測也是必不可少的,比如輸出濾波電感(實際上是輸出變壓器的漏感)上電流的采樣,逆變器輸出電流的采樣,負載電流的采樣等。電流信號的處理和電壓信號的處理有所不同,它首先要轉(zhuǎn)換成電壓信號才能對其進行處理。可以有兩種方法獲得,即在電路中串聯(lián)一個采樣電阻獲得與采樣電流成正比的電壓信號;也可以采用霍爾電流互感器將電流信號轉(zhuǎn)換成和其成線性關(guān)系的電壓量。
6 制動系統(tǒng)控制流程
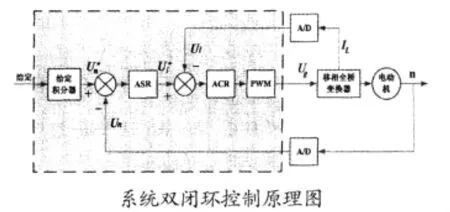
為了滿足提升機在減速段的減速度的要求,需采用雙閉環(huán)調(diào)速方案。如下圖所示,ACR為電流調(diào)節(jié)器。速度給定U*由給定積分器產(chǎn)生。給定積分器輸出電壓U*變化率與提升機的減速度相對應。在提升容器到達減速點后,切除定子高壓電源。制動電源接觸器合閘,其輔助接點閉合,DSP得到此信號,U*按給定的減速度減小。
7 移相角的產(chǎn)生方法
全橋移相PWM變換器,利用超前橋臂和滯后橋臂的相移來調(diào)節(jié)占空比。對所產(chǎn)生的PWM信號的要求如下:
(1)上下橋臂兩管的驅(qū)動信號180度互補導通;(2)4路驅(qū)動信號占空比均設(shè)置為50%,由于死區(qū)時間的影響實際輸出較小;(3)兩組橋臂之間有相位差,相位超前的信號作為超前橋臂信號,相位滯后的信號作為滯后橋臂驅(qū)動信號。
驅(qū)動信號生成可通過DSP的事件管理模塊EVA或EVB產(chǎn)生。事件管理器EVA或EVB有3個全比較單元,每個全比較單元都有兩個互補的PWM脈沖輸出,因此可以使用其中兩個比較單元提供4路驅(qū)動信號;設(shè)置定時器為連續(xù)增減計數(shù)模式,在定時器下溢中斷和周期中斷時分別設(shè)置比較寄存器的值,同時保證同一個比較寄存器在定時器下溢中斷和周期中斷設(shè)置參數(shù)之和等于周期寄存器的值T,這樣就可以使產(chǎn)生的PWM脈沖為 50%的占空比。死區(qū)時間由死區(qū)控制寄存器產(chǎn)牛。利用DSP的全比較單元可以方便地產(chǎn)生各種對稱或者不對稱的PWM波形。本文使用E VA中的通用定時器GPI實現(xiàn)采樣周期,由于所設(shè)計的變換器的功率開關(guān)的工作頻率為20kHz,所以采樣周期為50微妙。
8 總結(jié)
目前,礦井交流提升機大都采用動力制動或低頻電源制動方式。由于動力制動為能耗制動,以及制動可靠性差等因素,一直是制約動力制動電源發(fā)展的一個瓶頸。本設(shè)計所采用的DC/DC變換技術(shù)應用到制動電源上,從而提高了制動電源的效率和可靠性,并縮小了制動電源的體積:尤其是DSP的運用,讓系統(tǒng)的控制精度進一步提高。
[1]郝建功,張耀成,礦井提升機動力制動過程中的模糊控制,煤炭學報2003年
[2]王聰,吳宏杰,魏偉華,用于DC/D全橋變換器的全數(shù)字式PWM控制器,電力電子技術(shù),2000年
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
