基于一種模糊控制的鍋爐“虛假水位”對策研究
2010-09-21 08:21:46崔俊峰厲善亨上海海事大學商船學院
中國科技信息 2010年21期
關鍵詞:液位
崔俊峰 厲善亨 上海海事大學商船學院
基于一種模糊控制的鍋爐“虛假水位”對策研究
崔俊峰 厲善亨 上海海事大學商船學院
鍋筒水位是保證鍋爐安全運行的重要標志,本文討論了鍋爐虛假水位的形成因素,并提出相應地應對策略,同時驗證了PID控制與模糊控制在水位調節中的應用的可能性及特性。
鍋爐水位;PID;模糊控制
鍋筒水位是保證鍋爐安全運行的重要標志。水位過低時,如果負荷(蒸汽用量)較大,水的汽化速度又快,使鍋筒內的水量變化速度較快,一旦鍋筒內的水全部汽化,會導致鍋爐燒壞,甚至爆炸;水位過高,影響鍋筒的汽水分離,產生蒸汽帶液現象,是過熱器關閉結垢導致損壞,同時過熱蒸汽溫度下降,容易損壞汽輪機葉片,影響機組運行的安全和經濟性。因此,必須嚴格控制鍋筒水位的高低。
1 鍋爐汽包的數學模型
1.1 參數自適應模糊控制器結構
參數自適應模糊PID控制器結構如圖1所示。
以汽包水位的誤差e和誤差變化量ec作為模糊控制器的輸入量,以滿足不同e和ec對控制器參數的不同要求,根據模糊合成推理設計PID參數的模糊矩陣表,查出修正參數代入下式計算:
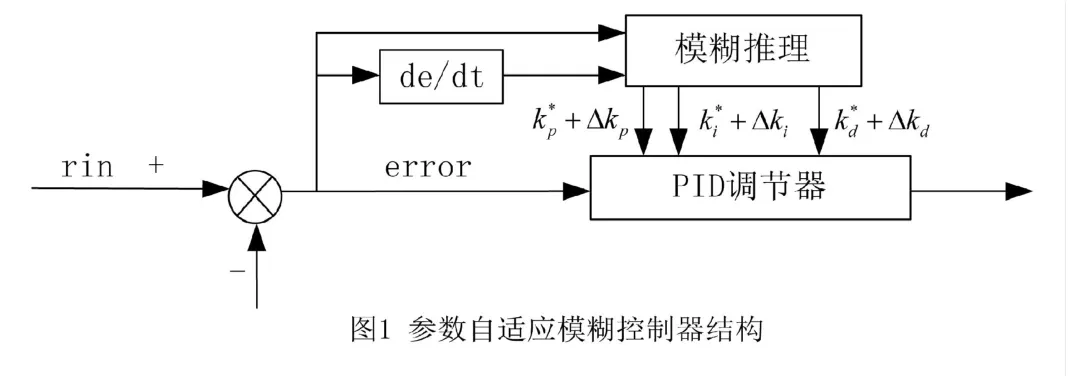
式中,kp、ki、kd為PID三個控制參數的取值,kp*、ki*、kd*為PID參數基準值,△kp、△ki、△kd為PID參數校正值。PID調節器的輸出值u到鍋爐給水流量調節器。
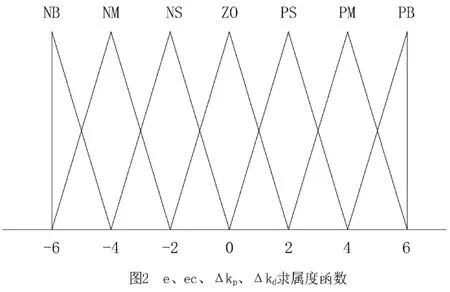
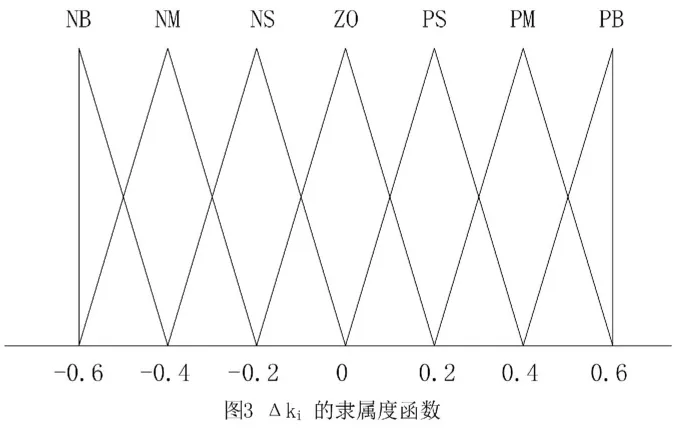
1.2 各變量隸屬度函數的確定
取汽包水位誤差e和誤差變化量ec,將其模糊化到相應論域。模糊化過程是通過比例變換因子將采樣獲得的具體值論域變換到模糊語言變量論域,設誤差e的基本論域為[-ep,ep],誤差ec的基本論域為[-ecq,ecq],各自的模糊語言變量論域為[-n,n]和[-m,m],則量化因子為ke= n/ep,kec=m/eeq。 取輸入語言變量e和ec的論域均為e,ec={-6,-4,-2,0,2,4,6},其模糊子集為e,ec=NB,NM,NS,ZO,PS,PM,PB。輸出語言變量Δkp和Δkd的論域均為Δkp,Δkd= {-6,-4,-2,0,2,4,6},Δki的論域為Δki={-0.6,-0.4,-0.2,0,0.2,0.4,0.6},模糊子集為Δkp,Δki,Δkd=NB,NM,NS,ZO,PS,PM,PB.e、ec、Δkp、Δki、Δkd語言變量的隸屬度函數均采用三角形隸屬度函數.語言變量e、ec、Δkd、Δkd 隸屬度函數如圖2,語言變量Δki 的隸屬度函數如圖3。
1.3 建立控制規則
通常,PID控制器的控制算式為:

針對不同的e和ec,人們總結出了一套kp、ki、kd的整定原則:
(1)當e較大時,為使系統具有較好的跟蹤性能,應取較大的kp與較小的kd,同時為了避免系統響應出現較大的超調,應對積分作用加以限制,通常取ki=0。
(2)當e和ec中等大小時,為使系統具有較小的超調, 應取得小些。在這種情況下,kp的取值對系統的影響較大,應取得小一些,kd的取值要適當。
(3)當e較小時,為使系統具有較好的穩定性能,kp與ki均應取得大些,同時為避免系統在設定值出現振蕩,并考慮系統抗干擾性能,當ec較大時kd可取得小些;ec較小時kd可取大一些。
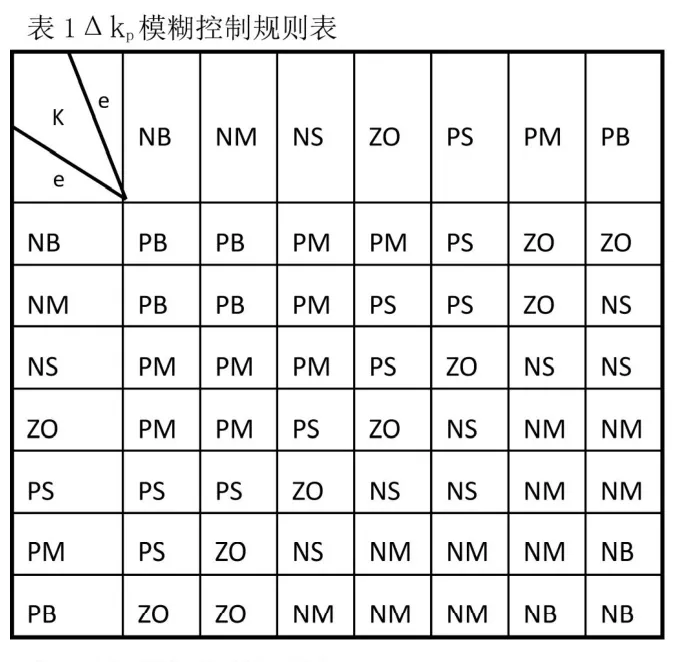
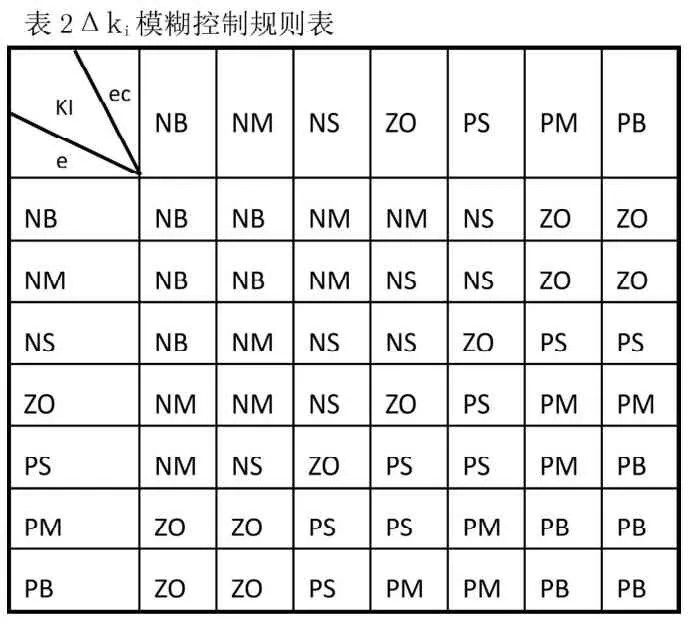
根據以上規則可得參數模糊規則表如表1、表2、表3所示。
?
?

?
在汽包水位實時控制中,根據汽包水位的誤差e和誤差變化量ec,直接查找模糊控制規則表得出校正量,用重心法將其去模糊轉化為清晰量,分別乘以量化因子求得最終結果Δkp、Δki、Δ k,將其與PID基準值 kdd*、kd*、kd*分別相加得到最佳的瞬態PID參數,然后按照常規的PID運算計算控制器輸出量到給水流量調節器。
2.仿真研究
仿真模型采用蒸發量為670t/h的鍋爐汽包對象,給水流量W與水位L的傳遞函數為
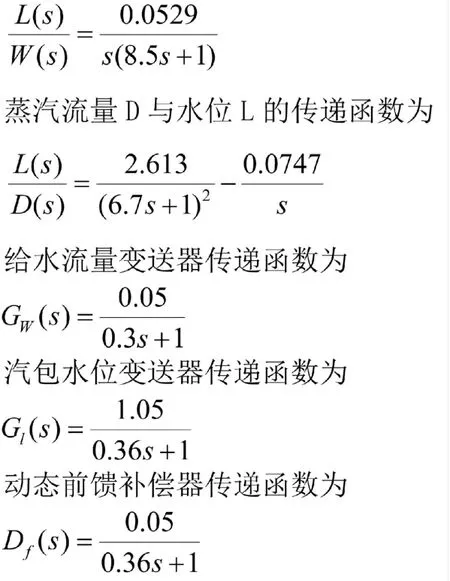
PID參數基準值為 kp*=1.611,ki*=0.014,kd*=4.841。
假定汽包水位給定值為0.3m,用MATLAB對控制系統仿真,仿真結果如圖4所示。由于采用了模糊控制的方法對PID參數進行調整,使在偏差較大時使kp增大,提高了系統的響應時間,在中間過程抑制了系統響應出現的超調,在接近穩態時kp、ki增大,kd減小,使系統縮短了穩態時間,抑制了振蕩。與傳統的PID控制器相比,用模糊自適應PID控制器控制汽包水位,控制精度高,動態性能好,魯棒性強。
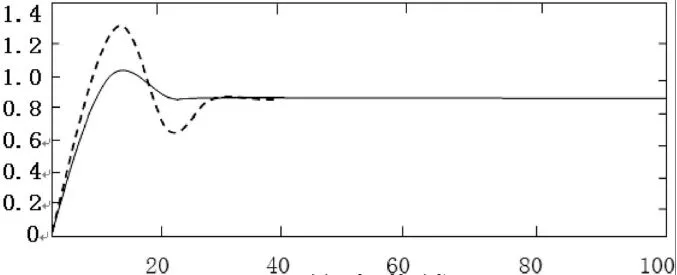
圖4 仿真曲線
結論
針對鍋爐汽包水位控制中經常出現的“虛假液位”現象,采用三沖量控制方式,并且將模糊自適應控制算法應用于該系統,利用模糊控制易于實現對復雜對象控制的特點,將操作人員和專家的控制經驗應用于控制過程,根據人工控制規則組織控制決策表,由該表決定PID參數的輸出值,在線實時的對PID參數整定,使系統運行中保持合適的瞬態參數,克服了傳統PID控制器參數不可改變的缺點,提高了系統的控制品質,仿真結果表明這種方法是可行的。
[1]王有朋,周浚哲,秦素梅.工業鍋爐汽包水位模糊自適應PID控制研究[J].沈陽工業學院學報.2004,(4).
[2]周佳,曹小玲,劉永文.鍋爐汽包水位控制策略的現狀分析[J].鍋爐技術.2005, (3).
[3]楚德全,王俊峰.鍋爐汽包液位的三沖量調節[J].煤礦機電.2008,(5).
[4]邵文福,.鍋爐液位控制技術之我見[J].黑龍江科技信息.2007,(21).
[5]高改會,于紅星,胡瑞玲.基于單片機的鍋爐液位自動控制系統的設計[J].機械工程師.2008,(9).
[6]潘祥亮,羅利文.模糊PID控制在工業鍋爐控制系統中的應用[J].微計算機信息.2004,(7).
[7]馬帥旗,鮑存會,劉沛.鍋爐液位控制系統設計[J].儀表技術與傳感器.2005,(9).
[8]王卓,林澄.鍋爐汽包液位動態前饋控制的研究[J].微計算機信息.2004,(12).
[9]李蘭君,喻壽益,高嵩,秦業,.微型鍋爐液位模糊PID控制[J].微計算機信息.2007,(31).
[10]馬琴,馬玉玲,孫元帥,王曉云,.鍋爐汽包液位檢測與控制[J].自動化技術與應用.2008,(11).
10.3969/j.issn.1001-8972.2010.21.057
厲善亨(1953-)上海海事大學,商船學院,副教授,輪機自動化;崔俊峰(1985-)上海海事大學,商船學院,碩士生,輪機自動化。
Abstractthe drum is to guarantee the safe operation of boilers, this article discusses the formation of false water level of boilers, and propose strategies accordingly, verify that the PID and fuzzy control in the application of water-level regulation of possibilities and features.
Key wordswater level;PID and fuzzy logic control
猜你喜歡
機床與液壓(2022年12期)2022-09-15 06:26:06
石油工業技術監督(2022年7期)2022-08-18 03:28:54
選煤技術(2021年3期)2021-10-13 07:33:38
測控技術(2018年12期)2018-11-25 09:37:22
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
設備管理與維修(2016年5期)2016-03-16 02:20:47
汽車維護與修理(2015年2期)2015-02-28 12:15:41
中國機械(2014年13期)2014-04-29 23:07:03
