油井解堵蠕動機器人的設計與分析
2010-10-18 00:51:24徐玉龍劉永紅張海峰吳成杰張彥振
石油礦場機械 2010年2期
徐玉龍,劉永紅,張海峰,吳成杰,林 強,張彥振
(中國石油大學(華東)機電工程學院,山東東營257061)
油井解堵蠕動機器人的設計與分析
徐玉龍,劉永紅,張海峰,吳成杰,林 強,張彥振
(中國石油大學(華東)機電工程學院,山東東營257061)
為了提高油層的滲透率,設計出了油井解堵作業蠕動機器人。利用該機器人產生的電火花放電能量作用于射孔通道,可有效解除油層堵塞。用ANSYS軟件分析了該機器人在熱力耦合作用下的應力、應變特性。研制的機器人樣機具有結構簡單、工作可靠等優點。
解堵;管道機器人;電火花放電
Abstract:A new plug removal creeping robot for oil well was designed.The design and work principles of the robot are introduced.The stress and strain performances of the robot acted by coupled thermal-mechanical were studied with ANSYS software.The stress and strain laws of the robot are given.The developed robot test prototype shows that the robot has simple structure,and high reliability.
Key words:plug removal;pipeline robot;electric discharge
由于聚合物和機械雜質對油層的污染、地層流體中細菌的滋生、地層本身的結垢和結蠟等原因,油井堵塞會日益嚴重,導致油層滲透率降低,產量下降。為了解除油層的堵塞,國內外研究了多種不同的解堵技術,滲油通道解堵有化學、物理、物理-化學聯合和微生物等4個方面的技術[1-3]。化學解堵工藝針對性極強,但工藝較復雜、費用較高,容易對地層造成二次污染;物理解堵方法可直接作用油層,不會造成二次污染,具有能耗少、易操作、增油效果明顯的特點,但難于清除有機質產生的堵塞[4-5];物理-化學法兼顧了各種技術的優點,適用面廣、作用力強,但不適用于所有地質環境[6-8];微生物在溫度高、重金屬離子含量高的條件下易于遭到破壞,該方法的應用也受到一定的限制。針對上述情況,作者提出了射孔炮眼內電火花放電解堵的新構想,該方法是采用機器人把電脈沖放電的正、負電極送入射孔中,使電脈沖放電能量直接作用于射孔通道中,靠放電時產生的1×104℃以上高溫、數十兆帕的瞬時高壓的爆炸沖擊作用、空化作用、電磁作用和熱效應等對儲層進行解堵和除垢,可有效提高油井的采收率。本文根據該種新技術的作業要求設計出了一種蠕動機器人,利用 Pro/E建立了該機器人的三維模型,運用ANSYS對主要受力部件進行了受力分析,總結出了相應的規律,在結構最優的基礎上,研制出了井下蠕動機器人的試驗樣機。
1 機器人蠕動進給裝置的設計
所設計的機器人蠕動進給裝置的結構原理如圖1,主要由偏壓彈簧、導向支撐、連接桿、上電磁推桿、上支撐腳、蠕動彈簧、下電磁推桿、下支撐腳等組成。偏壓彈簧用于提供導向支撐自適應膨脹時所需要的膨脹力;連接桿用于機器人零部件的連接與固定;導向支撐為帶導向輪的可自適應膨脹結構,當機器人下入油井套管時,導向支撐在偏壓彈簧的作用下使其上的導向緊貼套管壁,其作用是防止機器人與套管壁碰撞、保持機器人在套管中心的運行姿態;上電磁推桿在控制電流作用下可作軸向伸縮運動的電磁裝置,其作用是提供上支撐腳脹緊在套管壁上所需要的鎖緊力;上支撐腳為連桿結構,可在上電磁推桿的控制作用下膨脹鎖緊于套管壁上和松開鎖緊;蠕動彈簧用于控制機器人每一步的蠕動距離和蠕動速度;下電磁推桿是在控制電流作用下可作軸向伸縮運動的電磁裝置,其作用是提供下支撐腳脹緊在套管壁上所需要的鎖緊力;下支撐腳為連桿結構,可在下電磁推桿的控制作用下膨脹鎖緊在套管壁上和松開鎖緊。
該機器人蠕動進給裝置向下蠕動進給的工作原理是:先由地面絞車通過纜繩把機器人送入到井下要求的部位,然后給下電磁推桿通電使下支撐腳膨脹鎖緊在套管壁上,此時上電磁推桿不通電,上支撐腳處于收縮狀態,蠕動彈簧上部的機器人本體部分在重力的作用下,壓縮蠕動彈簧向下運動,當運動到重力與彈簧的彈力相等的位置后,機器人上部分的本體停止運動;此后給上電磁推桿通電使下支撐腳膨脹鎖緊在套管壁上,再給下電磁推桿斷電,使下支撐腳在彈簧力的作用下收縮脫離井壁,此時機器人下部本體在重力和蠕動彈簧彈力的作用下向下運動,當運動到蠕動彈簧的拉力與機器人下部本體的重力相等時停止運動,如此便完成了機器人的一步蠕動;重復上述動作便可實現機器人的蠕動進給。
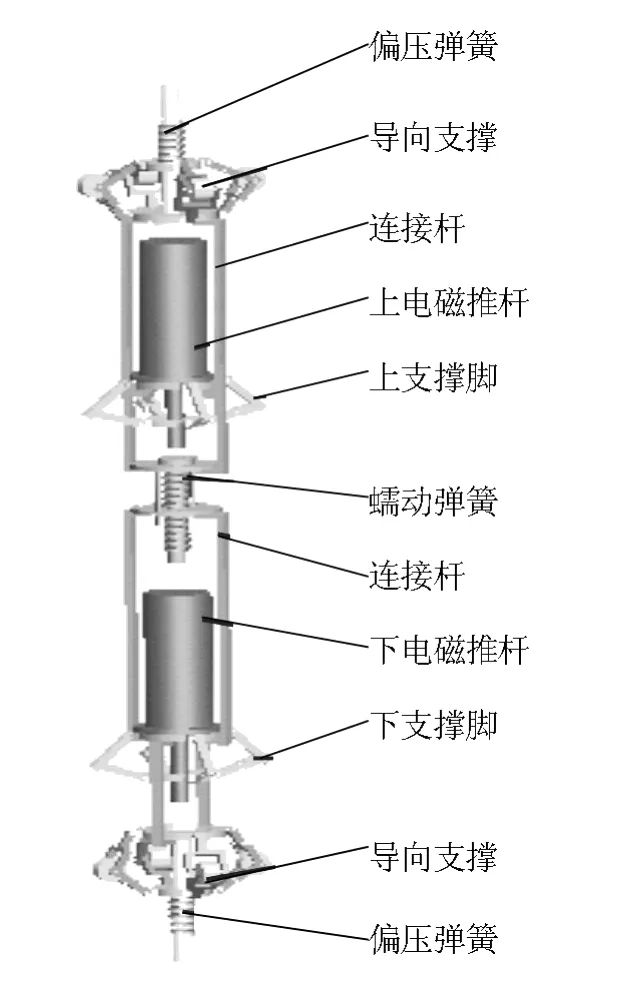
圖1 機器人蠕動進給裝置的結構
2 連接桿的熱應力分析與計算
連接桿是用于連接和固定機器人零部件的一個關鍵零件,為了節省空間,將連接桿設計成細長桿,連接桿在力和溫度共同作用下易發生變形,為保證其連接的可靠性和結構合理性,對連接桿在熱力耦合作用下的應力、應變特性進行了研究。
將PRO/E模型導入到ANSYS中并進行網格劃分,得到連接桿的有限元模型如圖2。圖中連接桿材料為45鋼,密度為7 850 kg/m3,線膨脹系數為1.232×10-5,泊松比為0.3。連接桿長度150 mm。不同溫度下45鋼的性能參數如表1。
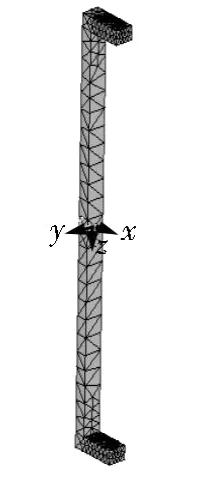
圖2 連接桿網格自由劃分
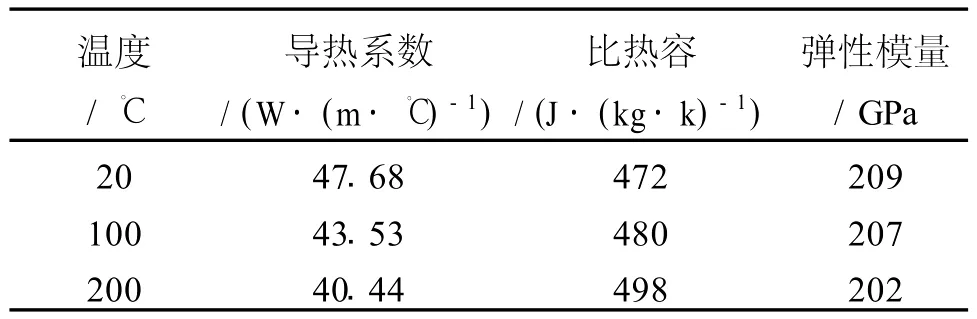
表1 不同溫度下45鋼的性能參數
設機器人井下作業深度為2 000 m,下放過程中溫度逐漸升高,取溫度范圍為20~200℃,設解堵過程中溫度保持200℃不變。
圖3為常溫下連接桿z方向變形云圖和等效應力云圖,可以看出,連接桿在z方向變形最大值出現在連接桿的兩端,常溫時在拉力作用下連接桿的變形很小,x、y、z三個方向的變形分別為2.93×10-2、1.8×10-5、2.02×10-2mm;最大等效應力發生在螺釘連接處,x方向為主變形,變形是由拉力產生的,應力值為71.3 MPa,遠小于45鋼的屈服強度355 MPa。
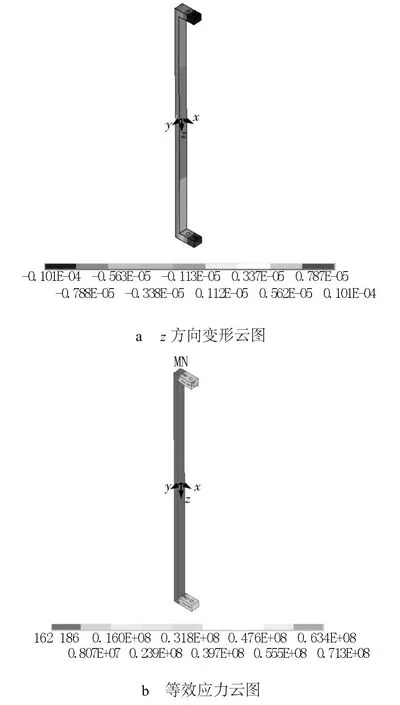
圖3 常溫下連接桿z方向變形云圖和等效應力云圖
圖4為常溫下連接桿z方向變形量變化與等效應力最大值變化曲線,可以看出,變形和等效應力先是隨著寬度的增加而快速降低,當連接桿寬度大于一定數值后開始緩慢降低,當連接桿的寬度為2 mm時的變形量為0.1096 mm、應力值為109.5 MPa,當連接桿的寬度為 5 mm時的變形量為0.00467 mm、應力值為58.7 MPa。
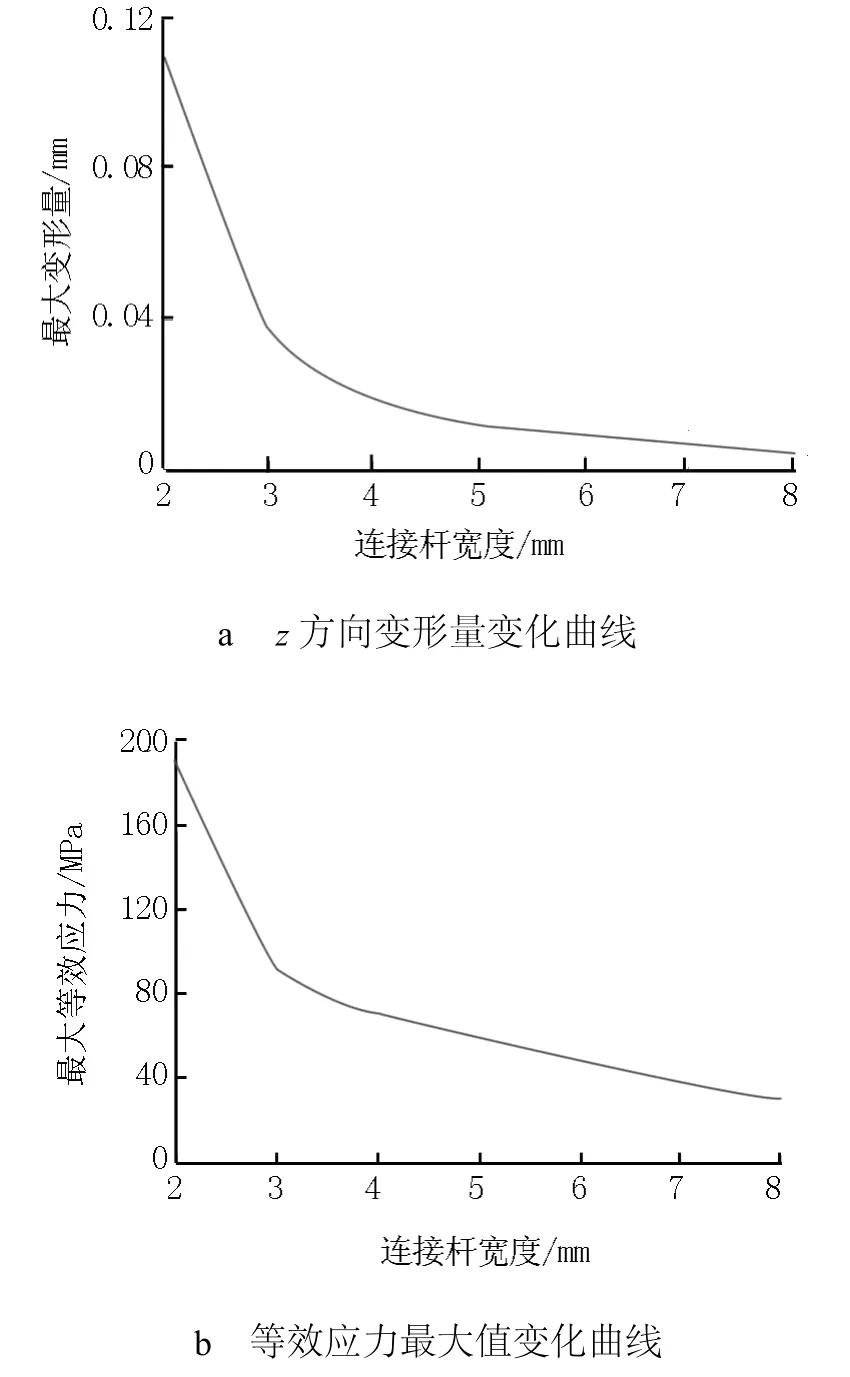
圖4 常溫下連接桿z方向變形量變化與等效應力最大值變化曲線
圖5為考慮溫度時連接桿z方向變形云圖和等效應力分布云圖,可以看出,該種情況下z方向最大變形發生在螺釘聯接部分,為0.388 mm,而x、y方向的最大變形均比z方向少1個數量級,最大變形量分別為0.048 3 mm和0.019 6 mm,所以z方向變形為主變形。這是因為z方向受力最大,而且受熱變形時連接桿兩端用螺釘聯接約束x和y方向變形受到限制,變形量不大。由圖5b可以看出,在連接處產生了應力集中,最大應力為66.1 MPa,小于屈服強度355 MPa,滿足工作要求。
圖6為考慮溫度變化時z方向變形和等效應力變化曲線,可以看出,變形和等效應力先是隨著寬度的增加而快速降低,當連接桿寬度大于5 mm后開始緩慢降低。溫度對變形的影響較大,在滿足強度要求的情況下,應避免構件尺寸過大而使整體的質量增加、靈活性降低,因此,本文連接桿寬度尺寸選為5 mm。
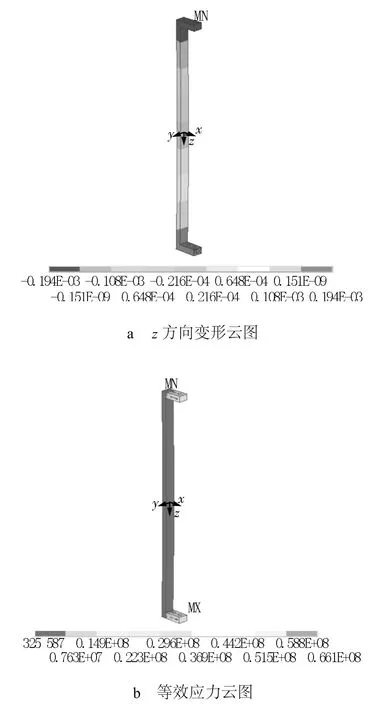
圖5 溫度變化時連接桿z方向變形和等效應力分布

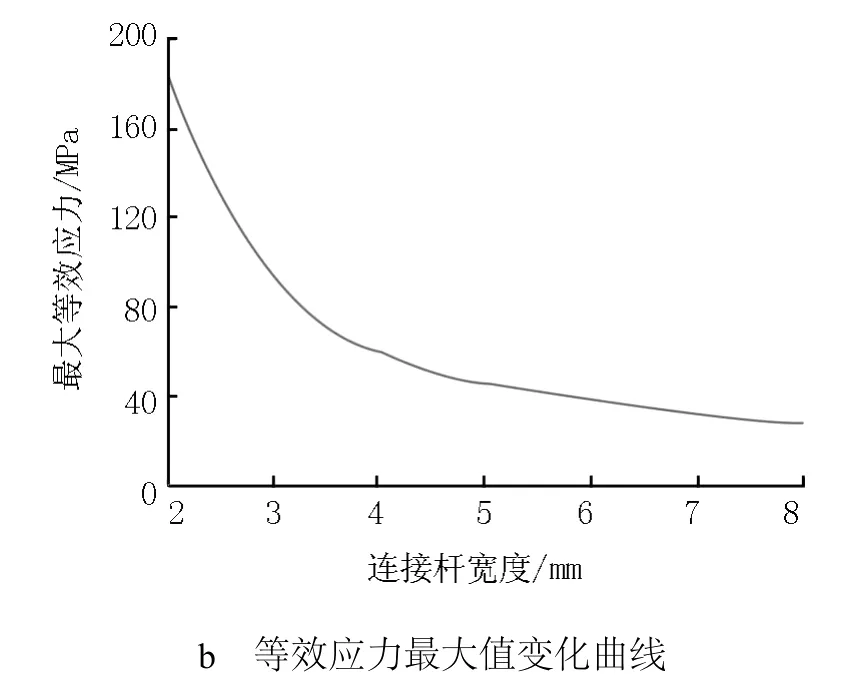
圖6 溫度變化時z方向變形和等效應力變化曲線
3 結論
1) 根據井下電火花解堵的要求設計出了井下作業蠕動式機器人機械結構,并制造出了相應的樣機。該蠕動機器人具有結構簡單、工作可靠等優點。
2) 考慮溫度變化會對機械結構變形產生影響,用ANSYS進行仿真分析,得到連接桿的變形和應力分布情況,可以為整體機構的準確移動控制提供理論依據。
[1] Shedid S A.Influences of fracture orientation on oil recovery by water and polymer flooding processes:An experimental approach[J].Journal of Petroleum Science and Engineering,2006,50(3-4):285-292.
[2] Migahed M A,Nassar I F.Corrosion inhibition of tubing steel during acidization of oil and gas wells[J].Electrochimica Acta,2008,53(6):2 877-2 882.
[3] Xiong C M.Selective acidizing technique of novel emulsified acid[J].Petroleum Exploration and Development,2007,34(6):740-744.
[4] 李 強,史建國.物理-化學復合解堵新技術[J].內蒙古石油化工,2008(1):76-78.
[5] 叢淑飛,李廣輝,王顯榮.物化復合解堵技術研究與應用[J].石油鉆采工藝,2003,25(S1):25-27.
[6] 康美娟,蒲春生.復合振動增產增注技術的研究與展望[J].石油礦場機械,2007,36(11):77-79.
[7] 宋 碩,張建國,馬繼業,等.哈特曼聲波發生器解堵增注試驗與應用研究[J].石油礦場機械,2009,38(01):59-61.
[8] 王 鈞,張海波,遲 森,等.多級復合振動增產增注工藝技術[J].石油鉆探技術,2007(4):50-51
Design and Analysis of Plug Removal Creeping Robot for Oil Well
XU Yu-long,LIU Yong-hong,ZHANG Hai-feng,WU Cheng-jie,LIN Qiang,ZHANG Yan-zhen
(College of Mechanical and Electronic Engineering,China University ofPetroleum,Dongying257061,China)
TE935
A
1001-3482(2010)02-0005-04
2009-08-17
國家自然科學基金資助項目(50674099)
徐玉龍(1985-),男,山東菏澤人,碩士研究生,主要從事工業機器人的技術研究工作,E-mail:xuyulong-01@163.com。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
核科學與工程(2021年4期)2022-01-12 06:30:26
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
今日農業(2020年19期)2020-12-14 14:16:52
中華詩詞(2020年1期)2020-09-21 09:24:52
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
中學物理·高中(2016年12期)2017-04-22 11:53:03
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
