基于SOC的衛(wèi)星姿軌控系統(tǒng)通用電模擬器設(shè)計(jì)
2010-11-26 10:50:36胡迪董云峰
中國(guó)空間科學(xué)技術(shù) 2010年2期
胡迪 董云峰
(北京航空航天大學(xué),北京100191)
1 引言
在衛(wèi)星地面電聯(lián)系統(tǒng)中,對(duì)于測(cè)量系統(tǒng)和執(zhí)行系統(tǒng),通常按照各真實(shí)設(shè)備的電接口規(guī)范和功能要求由各種電路板來(lái)模擬,該電路板被稱(chēng)為各設(shè)備的電模擬器[1]。地面電聯(lián)試階段采用電模擬器可降低成本、縮短開(kāi)發(fā)周期、能有效提升衛(wèi)星功能測(cè)試以及方便電模擬器的升級(jí)改造;可方便地模擬各部件工作狀態(tài)以滿足測(cè)試要求和驗(yàn)證的需要;還可以在電模擬器程序中加入故障模式,方便地進(jìn)行故障仿真,提升衛(wèi)星控制系統(tǒng)的可靠性和冗余性。而目前大部分研究著重于如何構(gòu)建衛(wèi)星仿真平臺(tái)、測(cè)試網(wǎng)絡(luò)及星載計(jì)算機(jī)的總線化設(shè)計(jì)[2-5],對(duì)于地面電聯(lián)試如何構(gòu)建通用型電模擬器關(guān)注較少。文獻(xiàn)[1]提出采用PXI總線構(gòu)建通用衛(wèi)星電模擬器平臺(tái)是基于標(biāo)準(zhǔn)總線的電模擬器,適合數(shù)字式仿真,不適合電信號(hào)故障模式下的仿真應(yīng)用。文獻(xiàn)[6]采用CAN總線和以太網(wǎng)構(gòu)建衛(wèi)星和火箭控制系統(tǒng)地面測(cè)試平臺(tái),電模擬器采用各種板卡實(shí)現(xiàn),并未實(shí)現(xiàn)通用化設(shè)計(jì)。文獻(xiàn)[7]只針對(duì)反作用飛輪提出了基于C8051F040的電模擬器設(shè)計(jì),此模擬器設(shè)計(jì)針對(duì)性太強(qiáng),核心芯片處理能力有限,不適合進(jìn)行復(fù)雜的精確的模型計(jì)算和故障模式注入仿真。文獻(xiàn)[8]提出采用 TM320F2812和C8051F040構(gòu)建電模擬器,對(duì)于各模擬非標(biāo)準(zhǔn)接口并未進(jìn)行詳細(xì)說(shuō)明,不能仿真各種電信號(hào)的故障模式。文獻(xiàn)[1]、[8]均不能直接用于采用PCM碼構(gòu)成串行移位接口的仿真應(yīng)用。
本文采用基于ARM7內(nèi)核的片上系統(tǒng)(SystemonaChip,SOC)微控制器設(shè)計(jì)通用型電模擬器,芯片處理能力強(qiáng)大適合精確復(fù)雜模型計(jì)算,接口豐富覆蓋了各部件接口特性,適合電信號(hào)仿真;并且所有部件模擬器采用相同的硬件設(shè)計(jì),只需修改配置表即可完成對(duì)不同模擬器的配置。分系統(tǒng)閉環(huán)測(cè)試表明該通用型電模擬器采用統(tǒng)一化硬件設(shè)計(jì),提高了系統(tǒng)的可靠性,減少了開(kāi)發(fā)成本,增加了系統(tǒng)的可擴(kuò)展性,提升了可維修性,對(duì)其他衛(wèi)星的地面電聯(lián)試有較高的參考價(jià)值。
2 通用電模擬器硬件設(shè)計(jì)
2.1 硬件接口分析及方案設(shè)計(jì)
在該型衛(wèi)星技術(shù)改進(jìn)電聯(lián)式系統(tǒng)研制過(guò)程中,姿態(tài)軌道控制分系統(tǒng)的電聯(lián)系統(tǒng)是其核心組成部分。針對(duì)該型衛(wèi)星姿態(tài)軌道控制分系統(tǒng)的接口特性,將分系統(tǒng)電模擬器分為:星載計(jì)算機(jī)模擬器、通用接口箱模擬器、敏感器模擬器、執(zhí)行機(jī)構(gòu)模擬器,與動(dòng)力學(xué)仿真系統(tǒng)和遙測(cè)遙控系統(tǒng)構(gòu)成閉環(huán)電聯(lián)試系統(tǒng)。星載計(jì)算機(jī)模擬器通過(guò)CAN總線控制通用接口箱采集敏感器數(shù)據(jù)和控制執(zhí)行機(jī)構(gòu)動(dòng)作,通用接口箱采用與真實(shí)部件一致的接口與敏感器模擬器、執(zhí)行機(jī)構(gòu)模擬器相連,敏感器模擬器與執(zhí)行機(jī)構(gòu)模擬器采用CAN總線與動(dòng)力學(xué)計(jì)算機(jī)進(jìn)行數(shù)據(jù)交換,遙測(cè)遙控分系統(tǒng)通過(guò)串行移位接口與通用接口箱相連,采集星載計(jì)算機(jī)模擬器的遙測(cè)數(shù)據(jù)和對(duì)部件模擬器進(jìn)行遙控操作。
根據(jù)接口定義(IDS)表,星載計(jì)算機(jī)接口分別與敏感器、執(zhí)行機(jī)構(gòu)、檢測(cè)和遙測(cè)遙控接口對(duì)應(yīng),其中敏感器由速率陀螺、二浮陀螺、太陽(yáng)敏感器、地球敏感器組成,執(zhí)行機(jī)構(gòu)由推力器、磁力矩器、反作用輪組成。整個(gè)系統(tǒng)組成信號(hào)達(dá)兩百多條,如果按一對(duì)一進(jìn)行電模擬器設(shè)計(jì),將帶來(lái)極高的設(shè)計(jì)成本。設(shè)計(jì)通用型電模擬器可有效解決接口眾多,信號(hào)差異大的缺點(diǎn),并且可有效降低設(shè)計(jì)成本,增加系統(tǒng)可靠性。
經(jīng)過(guò)分析統(tǒng)計(jì),該型衛(wèi)星信號(hào)種類(lèi)可分為如下幾大類(lèi):0/12V數(shù)字量輸入輸出、0/5V數(shù)字量輸入輸出、0/12V開(kāi)關(guān)量輸出、0/7V脈沖量輸入輸出、0/12V脈沖量輸入輸出、-10~+10V模擬量輸入輸出、0~+5V模擬量輸入輸出、RS422接口、SPI接口、AD/DA接口、串行移位接口等。根據(jù)信號(hào)類(lèi)型統(tǒng)計(jì),通用型電模擬器信號(hào)類(lèi)型覆蓋全面,不僅能通過(guò)相同的硬件配置成不同的敏感器模擬器和執(zhí)行機(jī)構(gòu)模擬器,而且對(duì)星載計(jì)算機(jī)接口進(jìn)行配置形成通用接口箱,對(duì)星載計(jì)算機(jī)進(jìn)行接口分離。
總體方案設(shè)計(jì)采用集成度較高的SOC設(shè)計(jì),組成結(jié)構(gòu)如圖1所示。
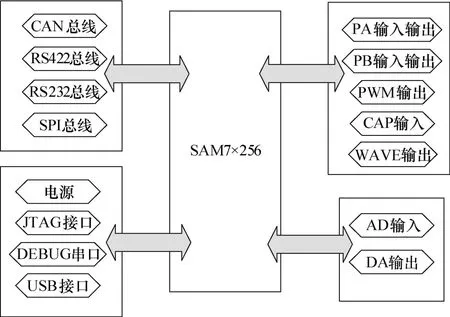
圖1 組成結(jié)構(gòu)圖
2.2 硬件通用設(shè)計(jì)
本文中SOC芯片選擇Atmel公司生產(chǎn)的AT91SAM7X256,片上集成256kbyte的Flash和64kbyte的SRAM,集成2個(gè)串口和一個(gè)調(diào)試串口,集成CAN總線控制器,可用IO口線達(dá)64條,其IO口線可通過(guò)軟件配置進(jìn)行不同功能使用。具體實(shí)現(xiàn)方式如下。
輸入輸出接口:基本的輸入輸出接口、要求輸入與輸出兼容12V電平,其中輸入輸出接口采用7X256自帶的通用并行IO,通過(guò)跳線選擇輸入或輸出方式,并經(jīng)過(guò)ULN2803作電壓調(diào)理,通過(guò)改變其上拉電壓可使其兼容+12V、+5V、+3.3V的電平。為了滿足大電流輸出的要求,PB口采用兩個(gè)三極管組成的射極跟隨電路用以驅(qū)動(dòng)開(kāi)關(guān)量控制繼電器。
PWM信號(hào):PWM信號(hào)采用單片機(jī)內(nèi)部的4路16位PWM信號(hào)發(fā)生器產(chǎn)生,經(jīng)ULN2803調(diào)理后輸出0~12V的電壓。
脈沖捕獲輸入和波形輸出:脈沖捕獲輸入和波形輸出采用單片機(jī)內(nèi)部的2個(gè)16位定時(shí)器計(jì)數(shù)器,每個(gè)可以有兩個(gè)捕獲輸入或波形輸出引腳(TIOA、TIOB)。經(jīng)ULN2803電壓調(diào)理后輸出0~12V電壓。
模擬量輸入輸出:模擬量輸入采用AD公司的積分型模數(shù)轉(zhuǎn)換芯片AD7708,它具有8路16位的輸入通道,控制總線采用SPI接口;模擬量輸出采用AD公司的4通道16位的芯片AD5564,SPI接口的控制總線,經(jīng)過(guò)測(cè)試精度符合設(shè)計(jì)要求。
總線接口:由于SAM7X256片上集成一個(gè)CAN總線接口,兩個(gè)USART串行口,通過(guò)配置不同的收發(fā)芯片即可實(shí)現(xiàn)CAN總線、RS422總線和 RS232總線,同時(shí)將DEBUG串口和 USB、JTAG口引出便于調(diào)試。
采用AT91SAM7X256核心芯片,其片上集成接口眾多,電路設(shè)計(jì)簡(jiǎn)單,工作頻率為48MHz,能適應(yīng)各種復(fù)雜模型計(jì)算和故障模式仿真。接口覆蓋不同種類(lèi)信號(hào),可有效進(jìn)行不同電模擬器的配置,電路板選擇標(biāo)準(zhǔn)的4U尺寸規(guī)格,電路板大小為220mm×145mm。
3 通用電模擬器的不同配置
3.1 硬件可配置性
采用通用電模擬器平臺(tái)可方便地實(shí)現(xiàn)對(duì)不同部件進(jìn)行配置,本文針對(duì)陀螺和反作用輪的接口特性及數(shù)據(jù)流向給出基于通用電模擬器的硬件配置說(shuō)明。
陀螺模擬器的配置:星載計(jì)算機(jī)模擬器通過(guò)開(kāi)關(guān)量控制陀螺部件模擬器的繼電器打開(kāi)或關(guān)閉陀螺模擬器,陀螺模擬器將電源狀態(tài)通過(guò)電平信號(hào)反饋給星載計(jì)算機(jī)模擬器,陀螺部件模擬器通過(guò)CAN總線從動(dòng)力學(xué)與環(huán)境計(jì)算機(jī)獲取角速度信息,從而將角速度轉(zhuǎn)成角度脈沖和模擬量輸出給星載計(jì)算機(jī)模擬器;從數(shù)據(jù)流向分析可以看出,可從通用電模擬器將CAN總線接口、數(shù)字量輸出接口、開(kāi)關(guān)量輸入接口、脈沖信號(hào)輸出接口和模擬量輸出接口提取出即可配置成陀螺電模擬器。
反作用輪模擬器的配置:星載計(jì)算機(jī)模擬器通過(guò)開(kāi)關(guān)量控制反作用輪模擬器的繼電器打開(kāi)或關(guān)閉反作用輪,反作用輪模擬器將電源狀態(tài)通過(guò)電平信號(hào)反饋給星載計(jì)算機(jī)模擬器,星載計(jì)算機(jī)計(jì)算出指令電壓通過(guò)DA輸出給反作用輪模擬器,反作用輪模擬器計(jì)算出力矩通過(guò)CAN總線傳送給動(dòng)力學(xué)與環(huán)境計(jì)算機(jī),同時(shí)反作用輪輸出轉(zhuǎn)速脈沖及速度方向給星載計(jì)算機(jī)模擬器;從數(shù)據(jù)流向分析可以得出,可從通用電模擬器將CAN總線接口、數(shù)字量輸出接口、開(kāi)關(guān)量輸入接口以及脈沖信號(hào)輸出接口和模擬量輸入接口即可配置成反作用輪電模擬器。
星載計(jì)算機(jī)模擬器由于接口眾多,采用通用接口箱將星載計(jì)算機(jī)模擬器應(yīng)用層軟件與接口分開(kāi),針對(duì)陀螺電模擬器和反用輪電模擬器,可從通用電模擬器將CAN總線接口、數(shù)字量輸入接口、脈沖量捕獲接口、模擬量輸入輸出接口以及開(kāi)關(guān)量輸出接口即可實(shí)現(xiàn)接口模塊的配置,如圖2所示采用通用硬件平臺(tái),配置成3+1SX軸陀螺電模擬器和反作用輪A的電模擬器,以及配置成通用接口箱的接口模塊,用于采集陀螺模擬器輸出的數(shù)據(jù)和控制反作用輪模擬器。
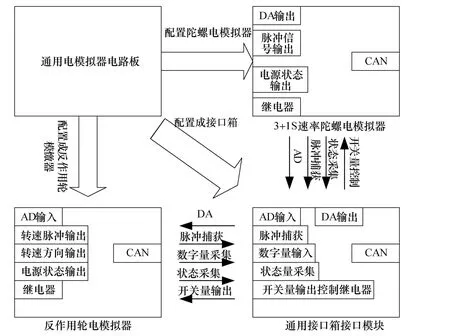
圖2 通用電模擬器的不同配置
3.2 軟件的可配置性
通用電模擬器軟件的設(shè)計(jì)根據(jù)需求分成驅(qū)動(dòng)層、配置層和應(yīng)用層,驅(qū)動(dòng)層負(fù)責(zé)實(shí)現(xiàn)對(duì)端口的操作,同時(shí)向應(yīng)用層提供統(tǒng)一的驅(qū)動(dòng)接口函數(shù);配置層負(fù)責(zé)實(shí)現(xiàn)不同的電模擬器;應(yīng)用層負(fù)責(zé)實(shí)現(xiàn)各模擬器的原理模型、誤差模型和失效模型,這些模型可以先在Windows平臺(tái)下調(diào)試通過(guò),本文在此不做分析。
配置層分兩部分,一部分負(fù)責(zé)提取該電模擬器所需驅(qū)動(dòng)函數(shù),稱(chēng)為設(shè)備配置,采用預(yù)編譯方式實(shí)現(xiàn),通過(guò)定義不同的宏定義實(shí)現(xiàn)不同驅(qū)動(dòng)函數(shù)的編譯;另一部分負(fù)責(zé)配置具體操作端口稱(chēng)為端口配置層,端口配置層根據(jù)上一節(jié)的硬件配置實(shí)現(xiàn);通過(guò)應(yīng)用層的調(diào)用關(guān)系即可實(shí)現(xiàn)所需電模擬器功能配置。
如陀螺電模擬器需要CAN總線,產(chǎn)生電平信號(hào)和脈沖信號(hào)以及模擬量信號(hào),設(shè)備配置層從驅(qū)動(dòng)層提取出CAN總線驅(qū)動(dòng)、端口操作驅(qū)動(dòng)、脈沖信號(hào)產(chǎn)生驅(qū)動(dòng)以及模擬量ADDA驅(qū)動(dòng),端口配置層負(fù)責(zé)將陀螺電模擬器所需端口配置到具體的端口上。
4 通用電模擬器的特點(diǎn)
該通用電模擬器具有下列特點(diǎn):
1)硬件平臺(tái)統(tǒng)一化,所有電模擬器采用相同硬件平臺(tái),電路完全統(tǒng)一,因此電路調(diào)試簡(jiǎn)單,可隨時(shí)更改配置。由于硬件平臺(tái)采用統(tǒng)一配置,因此軟件驅(qū)動(dòng)只需編寫(xiě)測(cè)試一次即可,節(jié)約時(shí)間,同時(shí)通過(guò)裁剪軟件即可實(shí)現(xiàn)不同模擬器的使用。
2)可擴(kuò)展性好,硬件平臺(tái)覆蓋所有部件的信號(hào)特征,如果新加入部件,只需根據(jù)新加部件進(jìn)行硬件配置即可實(shí)現(xiàn)新加部件的仿真測(cè)試,加快了算法及模型的驗(yàn)證周期。
3)可維修性好,采用通用化硬件和軟件平臺(tái),出現(xiàn)故障即可及時(shí)進(jìn)行對(duì)比分析或更換硬件板子。
4)可使仿真人員更加專(zhuān)注于模型及算法的開(kāi)發(fā),可快速驗(yàn)證算法的有效性,同時(shí)也可以通過(guò)故障注入等方式進(jìn)行故障仿真,提高算法的可靠性。
5 通用電模擬器閉環(huán)測(cè)試
采用該通用電模擬器完成某型衛(wèi)星的通用接口箱配置及敏感器模擬器配置和執(zhí)行機(jī)構(gòu)模擬器配置,接入地面電聯(lián)試仿真系統(tǒng),從星箭分離后開(kāi)始仿真,星載計(jì)算機(jī)控制周期設(shè)置為64ms,動(dòng)力學(xué)與環(huán)境計(jì)算仿真步長(zhǎng)為4ms,整個(gè)控制系統(tǒng)采用通用電模擬器共配置了速率陀螺電模擬器、二浮陀螺電模擬器、地球敏感器電模擬器、太陽(yáng)敏感器電模擬器、反作用輪電模擬器和推力器電模擬器,在不同的模式下采用不同的姿態(tài)控制方案,通過(guò)仿真達(dá)到了控制要求。
太陽(yáng)捕獲模式下采用推力器和速率陀螺姿態(tài)確定及控制方案,配置推力器和3+1S速率陀螺電模擬器和接口箱模塊。從速率阻尼模式開(kāi)始,經(jīng)過(guò)太陽(yáng)搜索、對(duì)日調(diào)整姿態(tài)到對(duì)日巡航結(jié)束,仿真初始參數(shù)為:滾動(dòng)角為10°,俯仰角為10°,偏航角為-50°,X軸角速度為1.5(°)/s,Y軸角速度為-2.1(°)/s,Z軸角速度為2(°)/s。圖3為太陽(yáng)捕獲模式下3個(gè)姿態(tài)角與角速度的變化情況,可看到3個(gè)姿態(tài)角速度均趨向于0,符合設(shè)計(jì)要求。

圖3 太陽(yáng)捕獲模式下的姿態(tài)角與角速度變化
地球捕獲模式采用地球敏感器、太陽(yáng)敏感器、速率陀螺和推力器的姿態(tài)確定和控制方案。從太陽(yáng)捕獲模式轉(zhuǎn)入地球捕獲模式,加入地球敏感器電模擬器以及接口箱模塊,依次進(jìn)行地球搜索、兩軸對(duì)地、三軸對(duì)地到地球指向結(jié)束。仿真初始參數(shù)設(shè)定為:滾動(dòng)角為10°,俯仰角為10°,偏航角為-50°,X軸角速度為1.5(°)/s,Y軸角速度為-2.1(°)/s,Z軸角速度為 2(°)/s。圖4是地球捕獲模式下角度與角速度的變化,3個(gè)姿態(tài)角最終變化趨向于0,3個(gè)姿態(tài)角速度也在控制要求范圍內(nèi)。
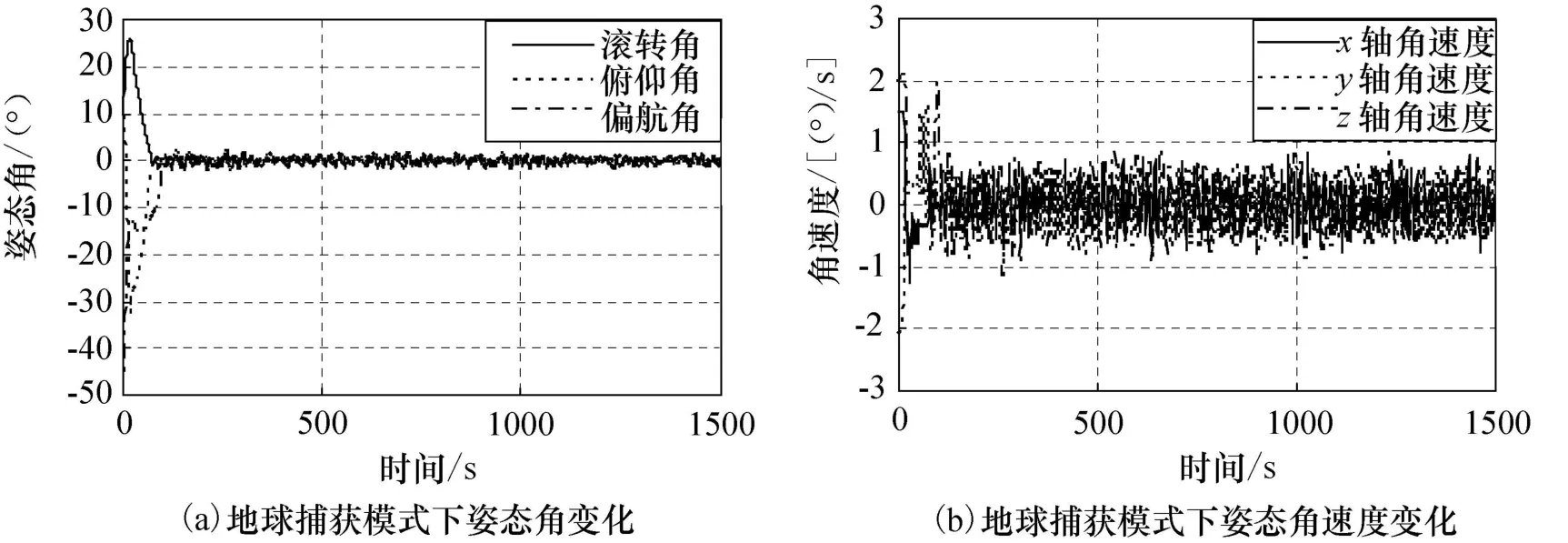
圖4 地球捕獲模式下的姿態(tài)角與角速度變化
正常模式采用二浮陀螺、太陽(yáng)敏感器和地球敏感器及反作用輪姿態(tài)確定和控制方案,在完成三軸對(duì)地定向后轉(zhuǎn)入,加入二浮陀螺電模擬器和反作用輪電模擬器及接口箱模塊,采用反作用輪進(jìn)行姿態(tài)控制,仿真初始參數(shù)設(shè)定為:滾動(dòng)角為0.5°,俯仰角為-0.6°,偏航角為0.3°,X軸角速度為0.1(°)/s,Y軸角速度為-0.1(°)/s,Z軸角速度為0.1(°)/s。圖5是正常模式下的控制效果,3個(gè)姿態(tài)角和角速度均達(dá)到了控制要求。
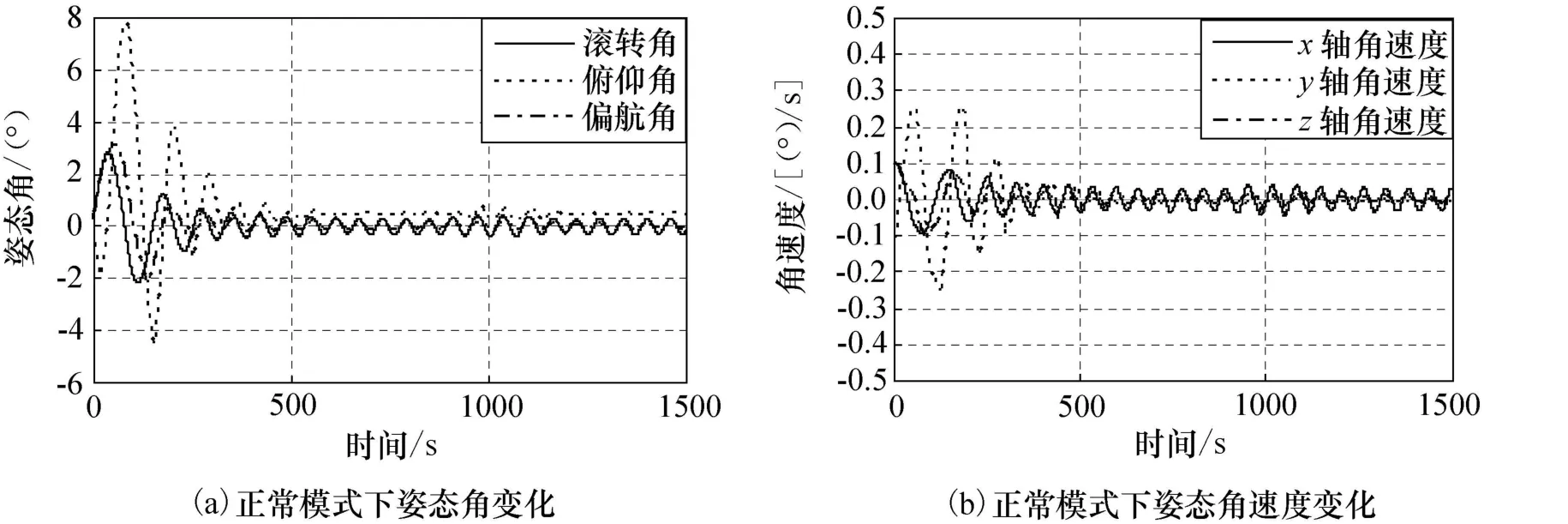
圖5 正常模式下的姿態(tài)角與角速度變化
6 結(jié)束語(yǔ)
通過(guò)對(duì)某型衛(wèi)星姿態(tài)軌道控制系統(tǒng)的電聯(lián)系所需接口進(jìn)行信號(hào)統(tǒng)計(jì)分析,采用SOC芯片將電模擬器進(jìn)行通用化設(shè)計(jì),不僅降低了開(kāi)發(fā)成本,而且縮短了開(kāi)發(fā)周期。并通過(guò)不同配置將通用型電模擬器配置成姿軌控制系統(tǒng)所需的模擬設(shè)備,接入閉環(huán)仿真測(cè)試系統(tǒng),進(jìn)行了太陽(yáng)捕獲、地球捕獲和正常三種模式的閉環(huán)測(cè)試,與單機(jī)全數(shù)字仿真結(jié)果進(jìn)行了比較,采用該設(shè)計(jì)方法對(duì)控制精度沒(méi)有影響,達(dá)到了設(shè)計(jì)要求。基于該電模擬器的通用化設(shè)計(jì),可廣泛應(yīng)用于不同衛(wèi)星平臺(tái)的電聯(lián)試電模擬器設(shè)計(jì)當(dāng)中,對(duì)地面衛(wèi)星電聯(lián)試應(yīng)用具有很好的參考價(jià)值。
[1]孫亞非,梁斌,李成,等.基于衛(wèi)星通用電模擬器開(kāi)發(fā)平臺(tái)的目標(biāo)測(cè)量系統(tǒng)電模擬器研制[J].宇航學(xué)報(bào),2008,29(2):705-709.
[2]蘭盛昌,趙丹,徐國(guó)棟.星載電子系統(tǒng)數(shù)字化設(shè)計(jì)仿真平臺(tái)[J].系統(tǒng)仿真學(xué)報(bào),2008,20(2):314-317.
[3]吳文昭,李想,陳琪鋒,等.分布式衛(wèi)星系統(tǒng)仿真平臺(tái)研究現(xiàn)狀與技術(shù)分析[J].航天控制,2007,25(4):57-62.
[4]VINCENTDUBOURG,JEANLOUISCARAVON,PASCALEDANTO,etal.AnInnovativeOnboardComputerForCNESMicrosatellites[C].DigitalAvionicsSystemsConference2002ProceedingsThe21st,IEEE:2002,9B2-1-9B2-11vol.2.
[5]WUXIAOFENG,TANYAVLADIMIROVA.Hardware-in-LoopSimulationofaSatelliteSensorNetworkfor DistributedSpaceApplications[C].NASA/ESA ConferenceonApaptiveHardwareandSystem.2008:424-431.
[6]楊希祥,張為華,肖凱.基于CAN總線的控制系統(tǒng)地面仿真測(cè)試平臺(tái)研究[J].中國(guó)空間科學(xué)技術(shù),2009,29(2):38-45.
[7]李冬柏.反作用飛輪電模擬器設(shè)計(jì)與應(yīng)用[D].哈爾濱:哈爾濱工業(yè)大學(xué),2006.
[8]孫亞非,梁斌,李成,等.基于TM320F2812和C8051F040的目標(biāo)測(cè)量系統(tǒng)電模擬器研制[J].電子測(cè)量技術(shù),2008,31(4):142-145.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
 中國(guó)空間科學(xué)技術(shù)2010年2期
中國(guó)空間科學(xué)技術(shù)2010年2期
- 中國(guó)空間科學(xué)技術(shù)的其它文章
- 基于小行星地形特征庫(kù)的自主測(cè)距與定姿方法
- 紀(jì)念 “東方紅一號(hào)”衛(wèi)星發(fā)射成功40周年座談會(huì)召開(kāi)