浮式鉆井平臺升沉補償系統主動力研究
2010-12-08 02:25:14張彥廷劉振東武光斌張作龍
石油礦場機械 2010年4期
張彥廷,劉振東,姜 浩,武光斌,張作龍
(中國石油大學機電工程學院,山東東營257061)
·專題研究·
浮式鉆井平臺升沉補償系統主動力研究
張彥廷,劉振東,姜 浩,武光斌,張作龍
(中國石油大學機電工程學院,山東東營257061)
為了提高浮式鉆井平臺升沉補償系統的補償效率,在被動補償的基礎上增設主動補償系統。主動式補償系統中主動力是關鍵參數之一,對系統的綜合性能有重要影響。建立了天車補償系統數學模型,基于Simulink軟件系統,對主動力的影響因素開展研究。分析了補償缸支撐載荷和儲能器工作容積對主動力的影響規律,為補償系統的開發提供設計依據和技術支撐。
升沉補償;主動力;儲能器;浮式鉆井平臺;天車
浮式鉆井平臺在波浪作用下引起的升沉運動通過鉆柱傳遞到井底,會引起鉆頭上鉆壓的變化,從而影響鉆進效率,降低鉆頭和鉆桿使用壽命;在惡劣海況下甚至會使鉆頭脫離井底,引起操作安全隱患,使鉆井無法進行而被迫停工,增加鉆井成本。為此,浮式鉆井平臺需要設置升沉補償系統,以減小平臺升沉運動對鉆柱的影響[1]。
鉆柱升沉補償系統通常采用液氣裝置驅動,按照其安裝位置可分為天車補償、游車補償、死繩補償、快繩補償等幾種形式[2-3]。本文針對天車補償形式建立了動力學模型,在此模型的基礎上,圍繞主動力配置、補償效果和儲能器工作容積等關鍵技術參數進行了理論分析和計算,為補償系統結構參數設計和元件的選取提供理論依據。
1 天車補償原理
天車補償的實質是在天車和井架之間用液氣彈簧連接代替常規的剛性連接,從而吸收井架隨平臺上下升沉的運動,減小天車、游車、大鉤和頂驅系統的運動幅度,將鉆壓的波動限制在鉆井操作的允許范圍內。
目前的天車升沉補償產品有多種[4-5],綜合各產品的特點,天車升沉補償系統可以分為被動補償和主動補償2部分,其工作原理如圖1。

圖1 天車升沉補償工作原理
被動補償系統液壓缸的缸筒置于天車臺上,與井架鉸接,鉸鏈與船體保持無垂直運動狀態。井臺上的儲能器通過鋼管與補償缸的油口連接,用以提供支撐天車、游車、大鉤、頂驅以及鉆柱等設備的主要動力。借助于儲能器中氣體的可壓縮性吸收井架的部分升沉運動。
由于液壓缸摩擦力和慣性的存在以及儲能器壓力的變化,導致被動補償系統存在滯后現象,補償效果有限。為提高系統的補償效果,在被動補償的基礎上增設主動補償系統。
主動補償液壓缸在液壓泵驅動下提供額外的驅動力,以克服摩擦力和慣性力,補償儲能器支撐力的變化,提高系統的補償效果。
2 數學理論模型
由圖1建立坐標系,其中 x1為平臺井架的絕對升沉位移,補償缸和主動缸的缸體均固連在井架上并隨之運動。
在波浪的作用下,平臺的升沉運動可以簡化為正弦運動,即

式中,xm1為平臺升沉運動幅值,m;ω1為平臺升沉運動角頻率,s-1。
設 x2、v2和 a2分別為天車的絕對升沉位移、速度和加速度,主動缸活塞桿、補償缸活塞桿、游車、天車、大鉤和頂驅均以該參數運動。
假設平臺靜止時補償缸和主動缸均處于中間位置,此時如果主動缸輸出力為零,則所有運動部件的質量與補償缸的支撐力相平衡。此狀態作為動力學分析的初始狀態。
補償液壓缸活塞相對于缸筒的位移為

此位移導致儲能器中氣體體積和壓力的變化,進而引起補償缸支撐力 Fc發生變化,即

式中,G0為初始狀態下作用在補償缸上的全部質量,N;A3為補償缸無桿腔的全面積,m2;V0為補償缸處于中間位置時儲能器氣體體積,m3。
忽略天車、游車、大鉤、頂驅之間內部彈性變形的影響,此時的運動加速度為

式中,Fe為鉆柱的彈性變形力,N,Fe=kdx2,其中, kd為鉆柱當量剛度,N/m;f為鉆柱變形過程中受到鉆井液的摩擦力,N,f=cv2,其中,c為摩擦因數, Ns/m;Fa為主動補償缸的推力,N;Mt為運動部件的總質量,kg,包括天車、游車、大鉤、頂驅以及1/3鉆柱質量。
3 數值計算分析
為了確定補償系統所需主動力,基于Simulink計算模型,選取支撐載荷 G0=3 000 kN,通過修改系統反饋控制參數 Kp,得到主動力和補償效率與Kp的關系曲線,如圖 2。圖中,補償效率 e=1-,其中,Δx1max為平臺的最大升沉位移,m,為天車的最大升沉位移,m;主動力比定義為,其中,Δf為主動力Fa的變化范圍。
根據理論模型,利用Simulink系統建立計算模型,對升沉補償系統最大主動力進行計算和分析。
3.1 補償效率的影響
在被動補償的基礎上增設主動補償系統,利用主動補償缸輸出的主動力抵消摩擦力和氣壓變化的影響,可以有效地提高系統的補償效果。主動力由主動補償液壓缸提供,其大小直接影響主動補償液壓系統工作參數。

圖2 主動力和補償效率與 Kp的關系
由圖2可以看出,隨著反饋控制參數 Kp的增大,補償效率e提高,當 Kp增大到300時,補償效率達到97.4%,即當平臺升沉位移為7.62 m時,大鉤的升沉位移僅為0.198 m,進一步增大 Kp,補償效率提高有限;隨著反饋控制參數 Kp的增大,主動補償所需主動力提高,當 Kp增大到300時,主動力比if接近0.2,即當靜載為3 000 kN時,主動力的變化范圍為600 kN,進一步增大 Kp,系統所需的主動力不再增大。
圖3為主動力與補償效率之間的關系。不同的設計補償效率對應著不同的主動力,補償效率越高,所需主動力就越大。由圖3,可以根據補償系統的目標補償效果確定合理的主動力配置,進而確定液壓系統的流量、壓力和主動缸直徑。
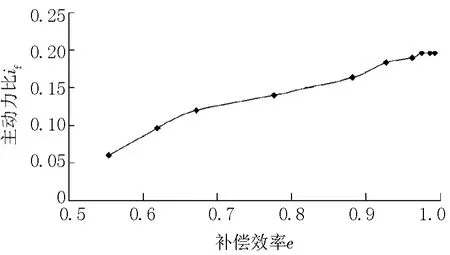
圖3 主動力與補償效率的關系
3.2 儲能器容積的影響
由理論模型可知,儲能器中氣體的體積在工作過程中不斷地發生變化,必將引起補償缸支撐力的變化,進而導致補償效率降低。因此增大儲能器的容積可以在一定程度上減小支撐力的變化,提高補償效率。但增大儲能器容積的同時也會加大設備的投資,增加海洋鉆井成本[5]。儲能器的容積對主動力也會產生影響。
基于上述數值計算模型,設定不同的儲能器容積,改變補償缸支撐靜載荷,得到了一組主動力比變化曲線,如圖4,圖中 iV為儲能器容積與補償缸容積的比值。

圖4 主動力比與支撐載荷的關系
由圖4可見,儲能容積一定時,所需的主動力比近似為一條直線,即主動力與支撐載荷的比近似為定值。因此只要確定了儲能器的容積,就可以根據支撐載荷確定所需的主動力。
在給定靜載荷的前提下,改變儲能器的容積可以得到主動力與容積的關系曲線。圖5為靜載荷為3 000 kN時主動力比與儲能器容積比的關系曲線。
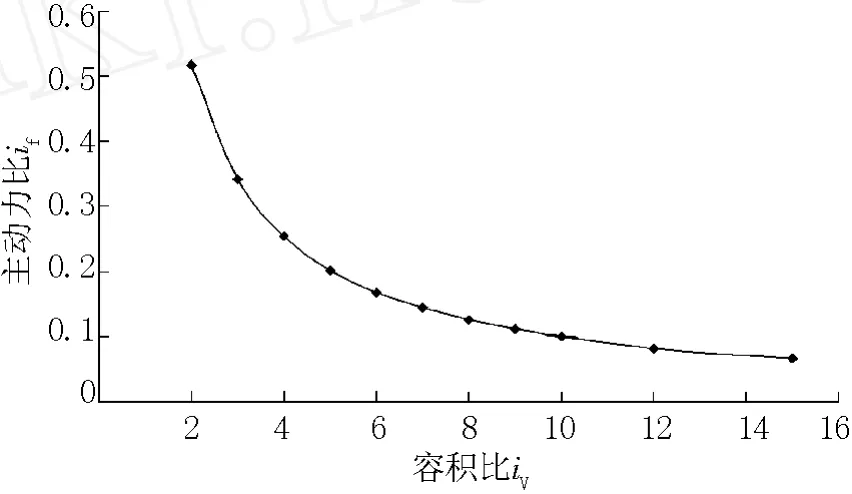
圖5 靜載荷3 000 kN時主動力與儲能器容積的關系
由圖5可見,隨著儲能器容積的增大,所需的主動力減小,但隨著儲能器容積的進一步增大,主動力降低變緩,二者之間成近似反比關系。根據圖5,可以在儲能器容積和提供的主動力方面尋求合理的參數組合。
4 結論
1) 海洋平臺升沉補償系統主動力配備受多方面因素影響。
2) 增大主動力配置能夠提高補償效果,但達到某一極限值后,補償效果主要受控制參數和策略的影響。
3) 主動力的配置基于支撐載荷和儲能器容積的大小。
4) 系統配備的主動力與支撐載荷成正比,與儲能器容積成反比。
[1] 方華燦.海洋石油鉆采裝備與結構[M].北京:石油工業出版社,1990.
[2] 方華燦.海洋鉆井船升沉補償裝置工作理論的初步研究[J].華東石油學院學報,1978(3):56-67.
[3] Leland R Robichaux,JanT Hatleskog.Semi-active Heave compensation system for Marine Vessels:United States,5209302[P].1993-05-11.
[4] Compensators and tensioners[EB/OL].http://www. kersolutions.com/ NR/rdonlyres/E633E7FF-D2EC-459E-94D8-FF29EE7601DE/19117/Compansatorsandtensioners.pdf.
[5] Crown mounted compensators[EB/OL].http:// www.nov. com/Drilling/Motion_Compensation/ Crown_Mounted_Compensators_(CMCs).aspx.
[6] 白 鹿,張彥廷,張作龍,等.鉆柱液壓升沉補償系統參數計算及比較分析[J].石油礦場機械,2009,38(3): 10-13.
Study on Active Force of Compensation System for Floating Drilling Platform
ZHANG Yan-ting,LIU Zhen-dong,J IAN G Hao,WU Guang-bin,ZHAN G Zuo-long
(College of Mechanical and Electrical Engineering,China University ofPetroleum,Dongying257061,China)
For floating drilling platform,an active compensator was equipped in addition to passive one recent year,in order to improve compensating efficiency.The active force is one of key parameters,and is important on overall performance for active compensating system.Mathematical model of compensating system for crown block is built to evaluate the influence elements on active force,based on Simulink software.The analysis provides insight on effect laws of loading supported by compensating cylinder and working volume of accumulators.The design criteria and technical supports are provided for development of compensating system.
heave compensation;active force;accumulator;floating drilling platform;crown block
1001-3482(2010)04-0001-04
TE951
A
2009-12-11
國家自然科學基金(50875262);國家高技術研究發展計劃(863計劃)(2008AA09Z311)
張彥廷(1968-),男,黑龍江拜泉人,教授,博士,主要從事石油機械、海洋裝備和流體傳動及控制的教學和科研工作,E-mail:ytzhang68@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11