實現超越:“混沌”超機動無人平臺
2010-12-31 00:00:00揚羽
輕兵器 2010年17期

對于地面無人平臺,我們通常所見的無非是履帶式車輛或輪式車輛,這種行進方式的車輛具有結構簡單的特點,但對復雜地形的適應能力較低。還有一種處于試驗階段的行進方式,即利用多關節機械腿交替擺動行進,其對復雜地形的適應能力較強,但結構復雜。那么,能否將這幾種驅動方式結合在一起,取其優長?“混沌”超機動無人平臺就是這一奇思妙想的產物——
目前,全球無人作戰平臺研究已進入爆炸性增長階段。就層出不窮的地面無人平臺來說,盡管其大小、功能各異,但行進方式卻幾乎全部采用輪式或履帶式。這兩種行進方式從根本上看,不外乎利用圓形輪的滾動(履帶的轉動亦依賴主動輪的滾動),實現對車體的推動。
驅動無人平臺的另一種思路,是讓無人平臺像人或動物一樣,利用多關節機械腿交替擺動的方式行進。兩種思路的行進方式各有利弊,采用輪式或履帶式結構簡單,行進效率高,易提高速度,但對復雜地形的適應能力較低,交替擺動式則正好相反,結構復雜、速度低,但適應能力強。也正是由于這種方式結構復雜,至今仍只停留在試驗階段,距離大規模成熟應用有較大差距。不過,結合這兩種行進方式的優點,實現真正“混合”型超機動性能的無人平臺,現在也有不少機構正在著手開發。
其中,一家名為“自主方案”(Autonomous Solutions)的美國公司,已開發出代號“混沌”的超機動智能平臺。正如其代號所暗示的那樣,它以獨特的技術途徑融合了輪式和機械腿兩種行進方式,為未來地面無人平臺的設計拓寬了思路。
“混沌”項目的起源
現在的“混沌”無人平臺已接近最終應用的形態,其車身兩側獨立驅動的四根條狀履帶腿顯示出優異的通行能力,可用于各種復雜地形環境下的偵察、監視和搜索任務,具有廣泛的軍事、民用價值。
不過,這一項目最初卻并非由軍方研究機構啟動,而是由民間富有創新精神的小企業獨自完成,后來才獲得美國陸軍坦克機動車輛研究與發展中心(TARDEC)的資金支持,為今天的成功打下了堅實的基礎。
“混沌”的創意最早由“自主方案”公司時任項目經理的梅爾.托瑞(現為該公司CEO)提出,當時他希望設計一種融合車輪、履帶和機械腿優點的車輛行進方式,既有輪式驅動的速度和效率,又有機械腿應對復雜地形的適應能力。
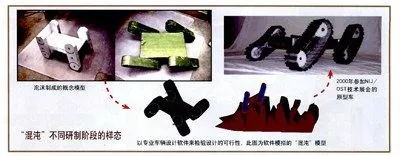
由于資金匱乏,托瑞最初只用各種玩具和民用車輛的零件試制了第一輛樣車,但托瑞對這輛幾乎僅由兩條履帶構成的車輛不太滿意,很快又用樂高(Lego)拼裝玩具組裝了一輛完全概念化的模型。同第一輛車相比,它已初具“混沌”雛形,車體雖然平常無奇,但驅動部分的設計卻非常有想像力,其四組車輪并未直接固定在輪軸上,而是分別通過兩只車輪之間的固定梁連接在輪軸上,這樣便使四組車輪都具有較高的自由度。
托瑞的這一創意很快得到了同事們的認可,陸續又有其他設計師加入了設計團隊。他們將Lego玩具拼裝成的模型帶到當地聯邦執法機構,征詢未來可能成為用戶的軍方和警方的意見。之后,又用泡沫制成一個更具體的模型,并在當地警方的指導下繼續完善設計。
在大致確定了車體的尺寸和結構后,托瑞的團隊開始嘗試用專業車輛設計軟件來檢驗設計的可行性。經充分模擬,托瑞的設計被證明極具可行性,車體在具有較高行進速度的同時,還具有較強的對復雜地形的適應能力。
2000年春,經驗證后的構想終于進入實體試制階段,第一輛樣車在三周內被制造出來,并被正式命名為“混沌”。當年6月,托瑞帶著“混沌”參加了在科羅拉多州丹佛舉辦的2000年度美國司法部科學技術辦公室(NIJ/OST)技術展會。無論從哪方面看,“混沌”都令人印象深刻。“混沌”的初次亮相雖然贏得不少喝彩,但仍未引起潛在用戶的足夠注意,在之后的兩年里,托瑞帶著“混沌”樣車輾轉于多家防務研究機構和大型防務企業,向他們推銷“混沌”的不凡之處,但卻鮮有投資者注意到它的潛在軍用價值。
最終,“混沌”的先進設計理念引起了TARDEC的注意,當時,其正在啟動一個名為SBIR的小型車輛機動性驗證項目,“混沌”樣車的適時出現正好滿足了TARDEC的要求,遂通過SBIR項目向“混沌”項目注資,以開發出更具實用性的產品。
艱難蛻變,融合履帶的機械腿
將一款概念樣車變成具有實用價值的超機動車輛,還有大量工作要做。獲得投資后,托瑞的團隊于2003年開始重新設計“混沌”樣車,以便使最初的設想達到可供生產的實用階段。為了達成樣車超機動性的性能要求,設計團隊制作了多個樣車,這些樣車采用不同的驅動行進方式,同時定型了底盤、動力、傳感器、控制和數據通信系統等要素。
融合履帶的機械腿
設計中最大的挑戰當然就是車體的驅動行進方式。傳統上,大中型車輛采用輪式或履帶式驅動方式,但將這類驅動裝置等比例縮小應用于小型無人車輛時,其通行效率將顯著降低。原本對大中型車輛不構成障礙的地面溝壑、坡路等復雜地形,對于小型無人車輛而言,則成為無法逾越的難關。因此,有人提出,小型無人車輛在應對這些障礙時,最佳驅動配置方式應是利用多關節機械臂或機械腿,模仿人或動物的行進方式,但如何提高這種方式在平地上行駛時的行進效率,則成為設計中的難題。
基于這些原因,TARDEC和托瑞在重新設計“混沌”的驅動模式時,保留了原先模型中讓車輪具有較大自由度的思路,且為其搭配不同的驅動模式,如機械腿的步行機制、車輪或履帶的滾動機制、機械腿和車輪混合搭配的模式等。最終,“混沌”選用了一種具有機械腿特點的長條狀履帶,作為其實現超機動性的主要驅動行進模式。這種結構和托瑞的最初構思非常相似,兩者的區別在于最初構思的方案中,兩只車輪為一組,共四組驅動肢,由其中心位置與輪軸連接;而最終方案則將四組雙輪組成的驅動肢變為四條長條履帶腿,履帶腿的一端與車體相連,同時履帶腿還可全向轉動,依靠四條履帶腿不同的轉動角度,實現超強機動。
這樣的配置方式極具想像力,較好地結合了履帶和機械腿的優點。當在平地行駛時,履帶腿放平,像平常的四履帶車輛一樣具有較好的行駛效率;當遇到履帶無法克服的障礙時,則調整履帶腿的高度與轉動角度,以實現四條履帶腿行走時的不同步態。此外,由于四條履帶腿采用獨立直流供電系統,可實現同向差速、異向同速或差速等不同轉動,配合履帶腿不同的配置角度和方向,可實現對不同類型障礙的穿越。比如,當在大角度陡坡上行駛時,由于小型車輛的自身質量較輕,極易傾覆或打滑,而結合了機械腿和履帶行進特點的“混沌”在面對這類障礙時則能大顯身手,它可將內側履帶腿放平緊貼陡坡高處,另一側轉動至垂直位置搭在陡坡低處,通過調節上下兩邊履帶轉動角度,實現穩步前進。在遇到崎嶇的復雜地形時,“混沌”的四條履帶腿還可以被動的方式適應不同起伏的地形,即各履帶腿根據地形條件隨時變化,以使所有履帶腿都與地面保持最大接觸面積。
車體及動力設計
在重新設計“混沌”時,其剛性車體也是設計的重點,最關鍵之處在于與四條機械腿連接的機械關節。每副機械關節有兩套連接機構與履帶腿相連,其中一套直接與驅動馬達連接用于傳遞其輸出的動力,但無法調節履帶腿與車體的角度;另一套則正好相反,可調節履帶腿的角度位置,但無動力輸出。車輛在復雜地面行進時,通過各個機械關節與兩套連接機構的配合,實現對機械腿的靈活控制。
車體的動力部分原先采用內置式鋰電池,更換電池時需要拆開車體。為提高車輛的使用時間、簡化維護,開發團隊在車體上重新設計了動力艙,將內置式電池改為外置拔插式,同時還可根據任務需要添加額外的電池組以延長使用時間。
至于負載部分,“混沌”可搭載約10kg的各類設施,其最常見的負載是一支可全向旋轉的可見光/紅外視頻攝像頭,該攝像頭具有10倍光學變焦和4倍數字變焦能力,是操作者遙控車體和監視、偵察環境情況的主要設備。而未來,開發團隊也準備研制合適的機械臂,以使其能夠在復雜環境下執行危險任務,比如IED裝置拆除、掃雷和探測危險物質等。目前,加裝機械臂的“混沌”樣車正進入試驗階段。
“混沌”整體性能
在經過長達數年的不斷改進完善后,“混沌”終于完成了由最初模型到成品的蛻變。“混沌”生產型的車體高20cm(履帶腿放平)/52cm(履帶腿垂直),車寬68.5cm,車長136cm(履帶腿向前向后伸展)/71cm(履帶腿全部向內收攏),整車質量約55kg,搭載的所有設備均防水防塵,適宜在各類復雜環境下使用。車載一塊56V的鋰離子電池組,還可再附加一塊,使其使用時間最長延長到4小時(其履帶行進模式的能量效率仍遠低于輪式模式,但遠高于純粹利用機械腿行走的機器人)。在遙控通信方面,“混沌”采用商用無線網絡構架,通過傳輸速率為54Mbps的無線網實現遠達1km的遙控距離和偵察數據傳輸。在越障能力方面,“混沌”的表現就很突出了,它的時速可達8km/h,跟得上步兵行進的速度,可在角度達50°的陡坡上穩定行進,可跨越寬約60cm的深溝,可翻越50°的斜坡,至于其他復雜地形,如災區的殘垣斷壁,則更不在話下。
超機動性能的實現
憑借著融合了履帶特性的機械腿,“混沌”具有超強的機動性能。下面詳細探討一下它在不同環境下的履帶腿位置配置。
適應性步態配置
這種配置也就是前文提及的履帶腿被動設置,四條履帶腿只接受來自車體的動力輸出,各履帶腿隨地形變化而不斷變化。這種配置對操作者而言也是最輕松的操控模式,無需對車體各活動履帶腿做過多操縱,只需命令它前進或后退即可,特別適用于變化無規則、崎嶇不平、且起伏不太大的路面狀況;如果遇列的溝壑起伏較大,比如起伏的尺度超過履帶腿的長度,就要不斷調整、固定履帶腿與車體的位置,并通過履帶的轉動實現行進。
越階梯型障礙步態配置
室內樓梯或矮墻是小型無人車輛常面臨的一道障礙,“混沌”在面對這類障礙時,其越障方式與PackBot機器人(見本刊2010年第5上期《PackBot:戰場上的百變“背包”》一文)相似。遇到障礙時,其前方兩副履帶腿如圖1所示向上翹起,搭上一級階梯沿后,利用履帶腿邊緣的卡齒掛上梯沿,在后部履帶腿的推動下爬上階梯,在爬上第一級階梯后,前方履帶腿根據下一級階梯的高度調整豎起的角度,以使履帶卡齒能掛上梯沿……以此爬上階梯。在攀越階梯型障礙時,車體后部兩副履帶腿處于被動適應狀態,其不與車體固定,而是根據已越階梯狀況搭靠在上面,利用履帶腿推動車體行進。
“蠕蟲”步態配置
在遇到具有規則起伏特征的路面時,為提高動力利用效率,需用到“蠕蟲”步態,如圖2所示。這種配置下,車體前方兩副履帶腿根據路面起伏特征,不斷做旋轉動作,而后方履帶腿放平向前轉動。行進時,車體頭部不斷抬高、降低,像蠕蟲一樣向前爬行。這種環境下,車體也可不斷調整四條履帶腿步行行進,但步行需要頻繁調節履帶腿與機械關節的角度、固定狀態及動力輸出,能量運用效率較低。

純行走步態配置
當遇到地形復雜且起伏不規則的情況時,車體就需要采用純行走步態,如圖3所示。這種配置下,車體的四條履帶腿根據路面的起伏情況,分別采取不同的固定角度和行進速率,像動物的四條腿一樣,在起伏不定的路面上前行。在使用這種步態時,以一條履帶腿的行進過程為例,它先轉動以使履帶腿一端觸碰到地面,如果高度過高未碰到地面的話,車體其他三條履帶腿就會向前推動車體,使車體前俯探低,以使這條履帶腿找到固定點,觸碰到地面,隨后,這條履帶腿上的壓力傳感器就會發出信號使之與車體相對固定,車體在獲得穩定的支撐點后,另一條履帶腿就會重復上述動作并找到穩定支撐點……四條履帶腿依次如此,實現穩步向前行進。這種純行走步態行進方式雖然速度較慢,但卻采用了最先進的仿生原理,能夠克服其他行進模式視若畏途的復雜地形。
合宜的折衷方案
地球上近一半的地面并不適于傳統的輪式或履帶式車輛行走,但是一般多足動物卻能在這些地方行動自如。因此,足式車輛與輪式及履帶式車輛相比具有獨特的優勢。與其他在研的純足式作戰平臺相比,“混沌”可謂走出一條折衷之路。它所開創的融合履帶功能的足式行進方式既有履帶式車輛的高驅動效率,又具有一般足式作戰平臺對地形的高度適應性,同時其機械腿也未采用多關節、多自由度的復雜設計,在成本和開發難度上都較其他純足式作戰平臺占優,其不失為目前一項合宜的方案設計。
編輯 劉