基于MC9S12XS128單片機的智能小車控制系統(tǒng)設(shè)計與實現(xiàn)
2011-01-10 03:35:58魯小雨
成都大學(xué)學(xué)報(自然科學(xué)版) 2011年3期
魯小雨
(東南大學(xué)自動化學(xué)院,江蘇南京 211102)
0 引 言
隨著汽車電子業(yè)的發(fā)展,具有自動識別道路功能的智能汽車成為業(yè)界研究的重點.本文研究的智能小車的制作設(shè)計以CMOS攝像頭作為路徑識別傳感器,以直流電機作為小車的驅(qū)動裝置,通過舵機來控制小車的轉(zhuǎn)向.本文不僅說明了整個智能小車控制系統(tǒng)的硬件和軟件設(shè)計與實現(xiàn),同時討論了為進(jìn)一步提高小車的穩(wěn)定性和行駛速度對小車控制算法的設(shè)計要求.設(shè)計出的智能小車可以通過實時對自身運動速度和方向的調(diào)整來“沿賽道”快速行駛.
1 系統(tǒng)總體設(shè)計
我們設(shè)計的智能小車控制系統(tǒng)結(jié)構(gòu)如圖1所示.
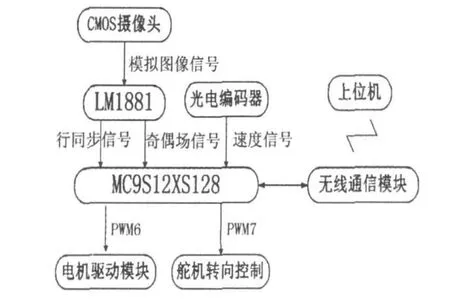
圖1 智能車控制系統(tǒng)結(jié)構(gòu)示意圖
如圖1所示,該智能車控制系統(tǒng)以MC9S12XS128單片機作為控制系統(tǒng)的核心[1],通過黑白CMOS攝像頭拍攝賽道圖像并以PAL制式信號輸出到信號處理模塊(LM1881)進(jìn)行視頻同步信號分離,所得到圖像和同步信號同時輸入到單片機控制核心,單片機對信號進(jìn)行判斷處理后,通過改變PWM波脈寬實現(xiàn)對舵機轉(zhuǎn)向的控制.舵機轉(zhuǎn)向采用PD控制,通過光電編碼器來檢測車速并將速度反饋到單片機控制核心,用PID控制算法處理后得到的控制量去改變電機驅(qū)動模塊的PWM波占空比,從而控制智能車的行駛速度.此外,控制系統(tǒng)還增加了路徑識別的模塊,對典型賽道進(jìn)行決策控制,提高了智能小車的運行速度和穩(wěn)定性.
2 硬件電路設(shè)計
智能小車控制系統(tǒng)硬件電路的總體設(shè)計本著可靠、高效、簡潔的原則進(jìn)行.系統(tǒng)的硬件電路包括控制系統(tǒng)核心電路、電源穩(wěn)壓電路、視頻同步分離電路、電機驅(qū)動電路等.
2.1 控制系統(tǒng)核心電路
設(shè)計中,我們選取MC9S12XS128單片機作為控制系統(tǒng)核心.該單片機的CPU外部總線頻率為8 MHz,內(nèi)部運算速度可達(dá)25 MHz,其內(nèi)部寄存器組中的寄存器、堆棧指針和變址寄存器均為16位.其為112引腳封裝,有2個8路10位精度A/D轉(zhuǎn)換器,脈寬調(diào)制模塊(PWM)可設(shè)置成4路8位或者2路16位.
在控制系統(tǒng)核心電路制作時,需要涉及一些普通的I/O口,單片機引腳規(guī)劃如下:PS4-7,SPI下載; AN00-15,2個8路10位ADC;ANIN,輸入視頻模擬信號VIDEO;IRQ,輸入視頻行同步脈沖信號;PH5,輸入奇偶場信號O/E;PWM5,舵機角度信號控制輸出;PWM1、PWM3,輸出電機控制信號.
2.2 電源電路設(shè)計
硬件電路的電源為7.2 V的鎳鉻電池,除了舵機需要的電壓是7.2 V,可以直接輸出以外,CMOS攝像頭的工作電壓為12 V,需要一個升壓的電路,而單片機的標(biāo)準(zhǔn)供電電壓、LM1881供電電壓、光電編碼器的供電電壓均為5 V,因此還需要一個降壓穩(wěn)壓電路.
2.2.1 5 V電源降壓穩(wěn)壓電路.
5 V電源降壓穩(wěn)壓電路如圖2所示.
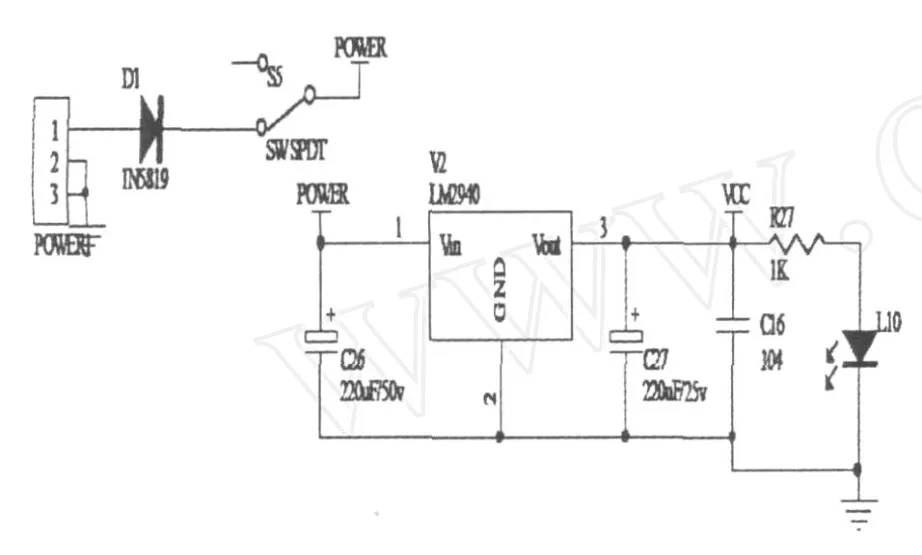
圖2 5 V電源降壓穩(wěn)壓電路
由于后輪驅(qū)動電機工作時電池電壓壓降較大,電路設(shè)計中必須采用低壓降串聯(lián)穩(wěn)壓芯片,以保證系統(tǒng)工作的穩(wěn)定性,本電路選用2940穩(wěn)壓芯片來實現(xiàn)穩(wěn)壓.
2.2.2 12 V電源升壓電路.
12 V電源升壓電路如圖3所示.
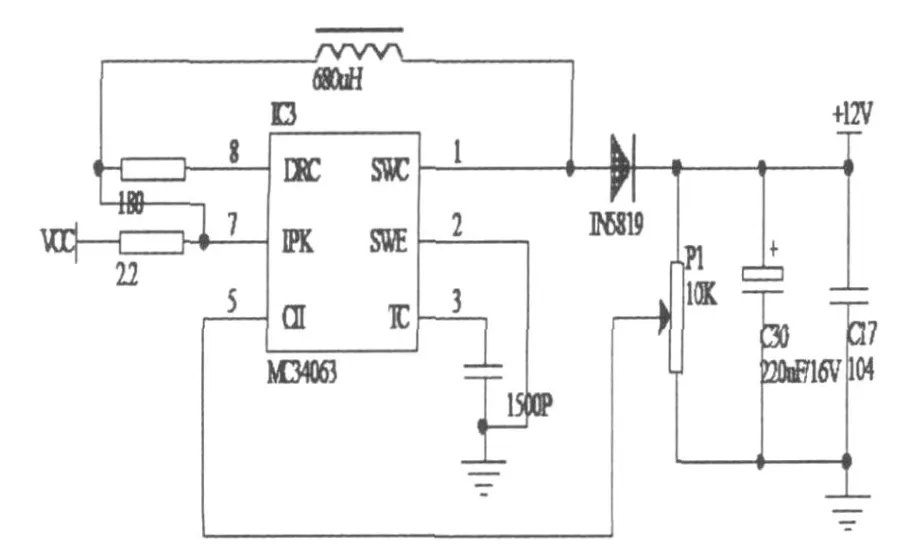
圖3 12 V升壓電路
MC34063芯片是一個單片機雙極型線性集成電路,專用于直流—直流變換器控制的部分.MC34063芯片內(nèi)包含了溫度補償帶隙基準(zhǔn)源、控制振蕩器、驅(qū)動器和大電流輸出開關(guān),能輸出1.5A的開關(guān)電流,故選取MC34063設(shè)計升壓電路,可使用最少的外接元件就能夠構(gòu)成開關(guān)式升壓變壓器.
2.3 視頻處理電路
智能小車視頻信號中除了包含拍攝到的圖像信號之外,還包括了行同步信號、行消隱信號、場同步信號、場消隱信號以及槽脈沖信號等,因此,必須準(zhǔn)確地把握各個信號之間的時序邏輯關(guān)系,才能實現(xiàn)對視頻信號的采集.LM1881是針對視頻信號的同步分離芯片,它可以從0.5~2 V的標(biāo)準(zhǔn)負(fù)極性NTSC制、PAL制、SECAM制視頻信號中提取復(fù)合同步、場同步、奇偶場識別等信號,然后將這些信號送到單片機控制核心,這些信號都是圖像數(shù)字采集所需要的同步信號.視頻同步分離電路設(shè)計如圖4所示,其中,C32和R24構(gòu)成一個簡單濾波電路,使視頻信號更平穩(wěn),C31和R26構(gòu)成了一個復(fù)位電路.
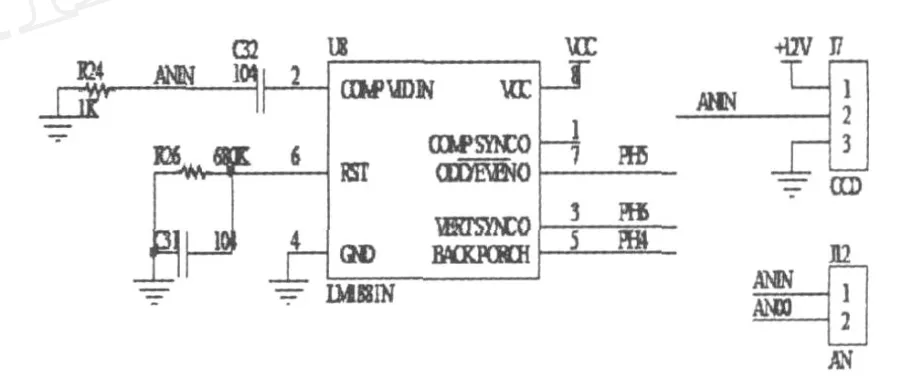
圖4 視頻同步分離電路
2.4 電機驅(qū)動電路
電機驅(qū)動電路如圖5所示.
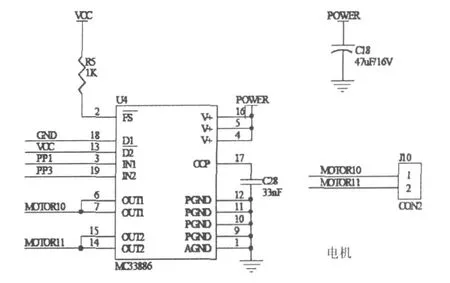
圖5 電機驅(qū)動電路
MC33886是一款專用于電機驅(qū)動的高效單片集成芯片,它最高能夠處理10 kHz頻率的PWM調(diào)制脈沖,并且能夠向負(fù)載電機提供高達(dá)5.0 A的電流.
在設(shè)計中,我們采用兩片MC33886芯片并聯(lián)驅(qū)動,這樣不僅可以提高電機的輸入電流,增大電機的實際功率,使電機在不增加動力源的情況下大大的改善其性能,還能夠減少MC33886芯片的功耗.
3 軟件系統(tǒng)設(shè)計
由于智能小車采用CMOS攝像頭作為傳感器,因此圖像采集處理和智能小車轉(zhuǎn)向及速度的控制是整個軟件的核心.軟件系統(tǒng)中,圖像信號采集算法采用直接邊緣提取算法以及圖像濾波算法得到黑線的位置,并通過動態(tài)閾值以實時適應(yīng)比賽環(huán)境,同時,編寫了賽道識別的算法,以實現(xiàn)對典型賽道的決策控制.智能小車舵機和電機的控制算法使用了魯棒性很好的經(jīng)典PID控制算法,配合使用實際參數(shù)補償?shù)姆椒?使小車在行駛的過程中達(dá)到了快速穩(wěn)定的效果.系統(tǒng)軟件設(shè)計的流程圖如圖6所示.
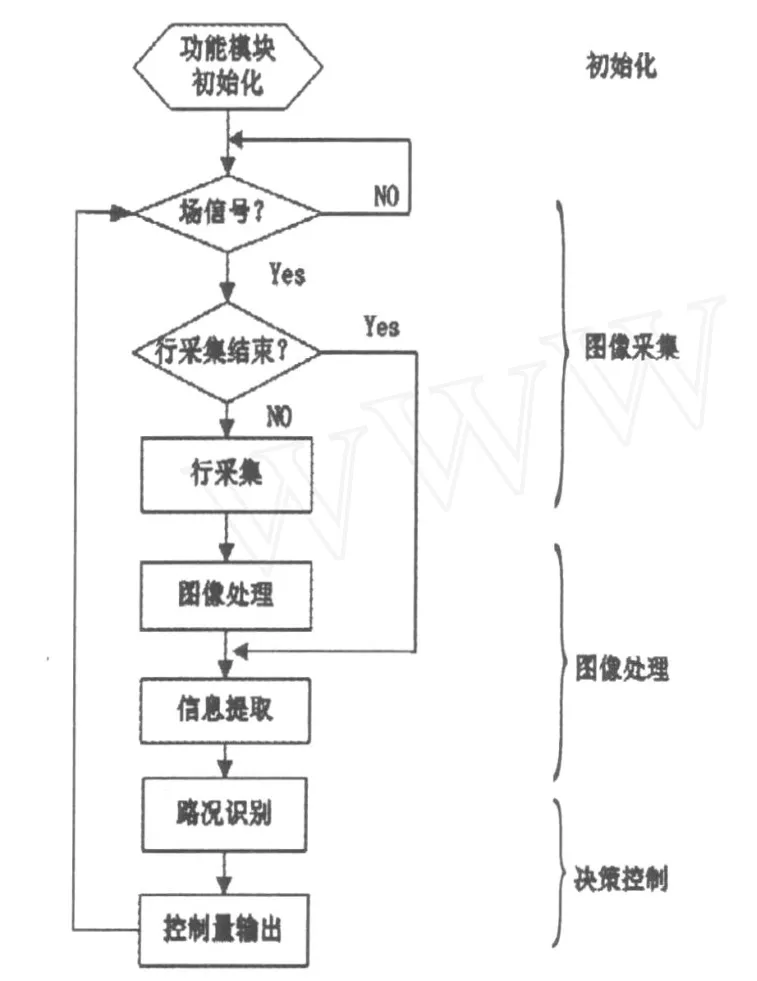
圖6 系統(tǒng)軟件設(shè)計流程圖
3.1 圖像采集算法設(shè)計
圖像采集算法[2]的流程圖如圖7所示.
考慮到實際賽道只是在白色KT板上布置黑色引導(dǎo)線,因此,可以采用隔行采集的思想來壓縮圖像的數(shù)據(jù).經(jīng)過實際實驗發(fā)現(xiàn),智能小車的圖像傳感系統(tǒng)在單一方向上只要有40個像素的分辨力就足夠用了,其前22行視頻為場消隱信號,為均勻采樣288行視頻信號,可以采樣場信號29行、36行……,即每隔7行采集一次即可.
3.2 黑線提取算法設(shè)計
黑線采用直接邊緣提取算法[3],識別黑線后,可以通過求平均值計算黑線的中心點.為進(jìn)一步消除外界因素的影響和十字交叉線的干擾,必須對圖像濾波加以矯正,具體步驟為:
(1)根據(jù)圖像模型去噪.賽道的黑色引導(dǎo)線是絕對連續(xù)的,不可能出現(xiàn)全白行.當(dāng)某一行求取的中心線位置與相鄰的兩行相差較大時,可認(rèn)為該行錯誤,需采用中值濾波方法重新獲得該行位置.
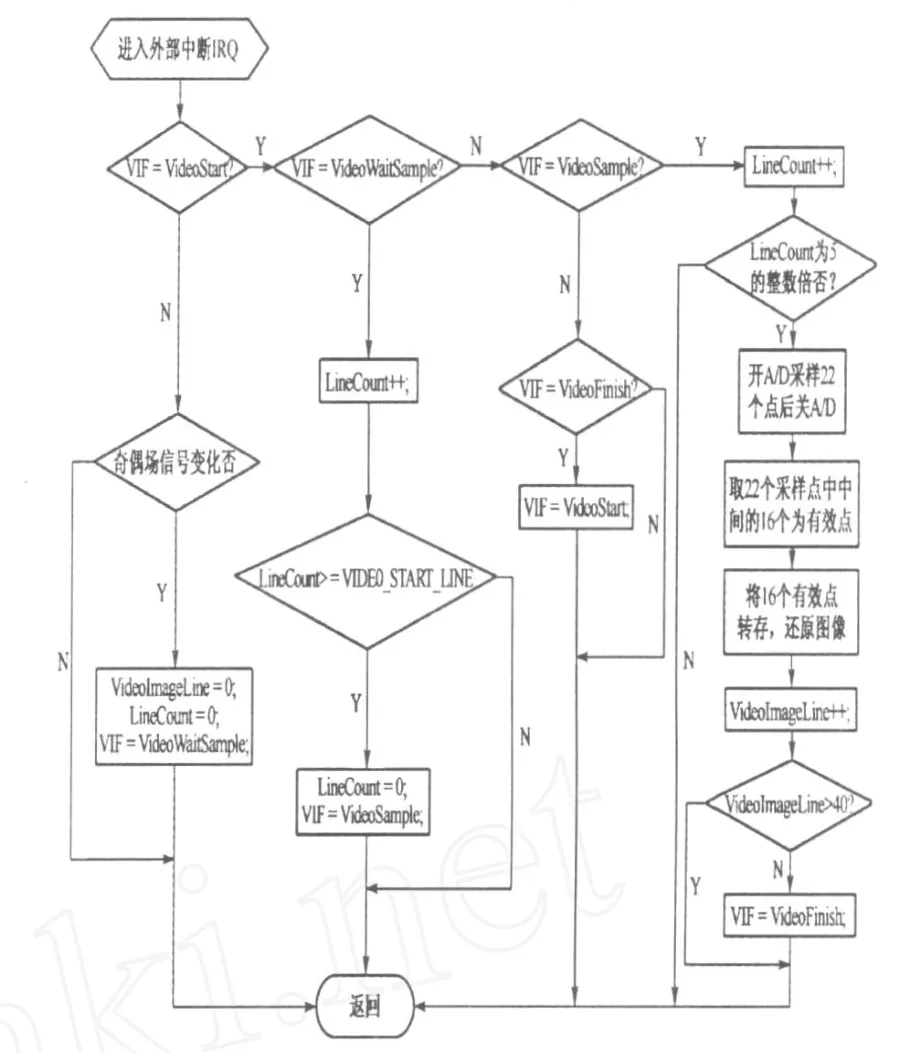
圖7 圖像采集算法流程圖
(2)當(dāng)出現(xiàn)兩段黑線情況時,比如,賽道比較密集,或是“十”字交叉道,或是大“S”彎道,可保留最底下的一段,并增加路徑識別的算法,給出適當(dāng)?shù)目刂撇呗?
(3)由于攝像頭可能相對于賽道存在一定的傾斜角度,因此采集到的圖像可能存在一定的梯形失真,可通過添加一個線性修正值來消除,該線性補償系數(shù)通過實驗來確定.
3.3 舵機轉(zhuǎn)向和速度調(diào)節(jié)PID控制算法設(shè)計
智能小車的舵機轉(zhuǎn)向和速度調(diào)節(jié)采用PID控制算法[4]來控制,它結(jié)構(gòu)簡單、穩(wěn)定性好、工作可靠、調(diào)整也十分方便.
3.3.1 速度的控制.
速度控制采取的基本策略是彎道降速,直道提速.因此,控制中需要根據(jù)當(dāng)前測速和路面彎道情況來決定當(dāng)前速度,當(dāng)前速度反饋值與當(dāng)前設(shè)定速度存在的偏差,記為 e (k).那么就可以通過偏差值來調(diào)節(jié)當(dāng)前的速度值.
在計算機上實現(xiàn)PID算法時,可通過數(shù)字PID調(diào)節(jié)器采用增量型算法來實現(xiàn),增量式為,

因此,運用PID控制的關(guān)鍵就變?yōu)檎{(diào)整3個系數(shù) q1,q2,q3,即參數(shù)整定,在具體PID參數(shù)整定時,我們采取了簡化的擴充臨界比例度法[4].
通過PID算法對速度的調(diào)整后,最終將經(jīng)過圖像提取算法處理后的黑線位置和對應(yīng)的PID參照速度處理成二次曲線的關(guān)系,使得小車在直道和彎道相互過渡時加減速比較靈敏.
3.3.2 舵機轉(zhuǎn)向的控制.
在舵機控制時,采用PD控制可以達(dá)到較好的效果,將P項認(rèn)為是計算得到的黑線的位置和圖像中心位置的偏差,而D項認(rèn)為選定行的黑線位置與上幅圖像中的黑線位置的差值.
我們在實際測試中發(fā)現(xiàn),增加P項系數(shù)可以增強小車的沿線能力,實現(xiàn)小車的轉(zhuǎn)向提前,達(dá)到切彎的目的,但是若P系數(shù)太大,也會導(dǎo)致大半徑弧線切彎過度.加入D項系數(shù)后,可以使小車入彎時轉(zhuǎn)向提前,出彎時轉(zhuǎn)向減少,對大S彎切線很有好處.通過適當(dāng)?shù)恼{(diào)節(jié)PD參數(shù)可以使小車靈活的運行.
3.4 賽道識別和彎道控制算法設(shè)計
典型賽道如圖8所示.賽道主要分為直道、小S彎道、急轉(zhuǎn)彎、十字交叉等幾種.對于直道,以及比賽中小于15°的上下坡,配合PID控制算法,具有較好的控制效果.但對于別的賽道可通過路徑識別算法判斷當(dāng)前所處的賽道,針對實際情況做出相應(yīng)的控制處理.賽道識別算法具體步驟如下:
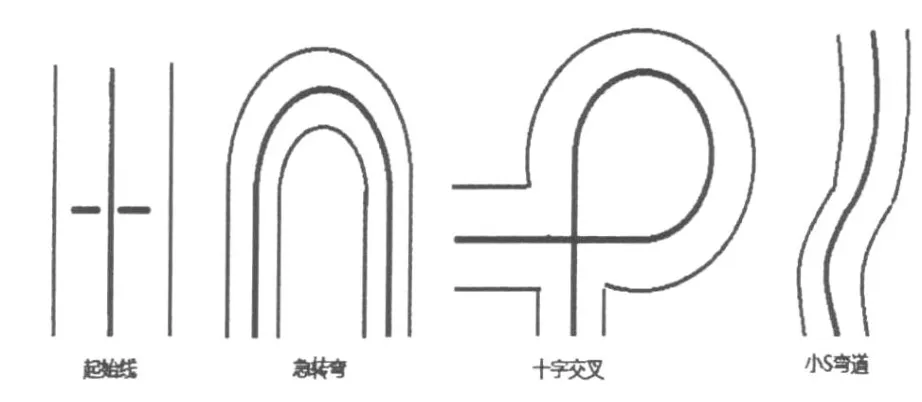
圖8 典型賽道示意圖
(1)選取賽道上間隔一定距離的黑點,計算所選n個黑點的位置x相對于視場中心的平均位置x—= x/n.
(2)平均位置與視場中心絕對值之差表示了當(dāng)前賽道的彎曲程度,其值的正負(fù)表示了是向左彎曲還是向右彎曲,其值越大表示拐彎半徑越小.
(3)通過適當(dāng)?shù)倪x取黑點的間隔,可以達(dá)到比較明顯的區(qū)分效果,能夠順利的識別出急轉(zhuǎn)彎與直道,而小S彎道可能被識別為直道,這正是設(shè)計所希望的,即在小S彎道可以直接加速沖過去而不會偏出賽道.
(4)對于起點和十字賽道的識別可通過黑線賽道兩旁黑線部分的長度來識別,通過適當(dāng)?shù)脑O(shè)定其寬度值的大小,可以順利識別.
順利識別賽道后,還需要對典型賽道做出相應(yīng)的處理,其處理方法如下:
(1)起始線.在定時一段時間后執(zhí)行判斷程序(保證在起始的時候不會停下來),判斷讀入的包含了起始線的圖像的場數(shù)大于一個給定值(由于攝像頭的前瞻性,在終點之前的一段距離,攝像頭就識別到了終點,為了沖過終點)就讓電機輸出0.
(2)急轉(zhuǎn)彎.要求小車在急轉(zhuǎn)彎處能夠立刻減速,而PID調(diào)節(jié)難達(dá)到理想效果,可以在識別到急轉(zhuǎn)彎時,讓小車電機輸出負(fù)值,從而使小車的后輪反轉(zhuǎn),這樣可以保證小車速度迅速降下來.
4 結(jié) 語
本文詳細(xì)說明了帶CMOS攝像頭的智能小車系統(tǒng)中硬件和軟件的設(shè)計制作過程.圖像采集時,采用了壓縮圖像的方法,通過提取黑線并實現(xiàn)了動態(tài)閾值的設(shè)定,利用PID調(diào)節(jié)使得舵機和電機輸出得到了較好的控制,路徑識別和決策控制的添加,保證了智能小車在彎道上平穩(wěn)快速的行駛.
[1]王威.HCS12微控制器原理及應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2005.
[2]蔡波.視頻實時圖像處理系統(tǒng)研究及設(shè)計[J].電視技術(shù), 2005,29(5):23-25.
[3]董翠敏.一種有效的圖像二值化方法在CCD傳感器圖像信息處理中的應(yīng)用[J].成都大學(xué)學(xué)報(自然科學(xué)版), 2009,28(4):1-4.
[4]Park K H,Bien Z,Hwang D H.A Study on the Robustness of a PID-type Iterative Learning Controller against Initial State Error [J].International Journal of Systems Science,1999,30(1):102 -135.
[5]王勤.計算機控制技術(shù)[M].南京:東南大學(xué)出版社,2003.
[6]邵貝貝.單片機嵌入式應(yīng)用的在線開發(fā)方法[M].北京:清華大學(xué)出版社,2004.
[7]楊加國.單片機C語言與匯編語言混合編程[J].成都大學(xué)學(xué)報(自然科學(xué)版),2008,27(3):1-4.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
