模糊神經網絡信息融合在管道機器人導航中的應用*
2011-01-22 03:36:04李慶云楊文凱
網絡安全與數據管理 2011年3期
李慶云,楊文凱,李 揚
(中國石油大學(華東)計算機與通信工程學院,山東 東營 257061)
模糊神經網絡信息融合在管道機器人導航中的應用*
李慶云,楊文凱,李 揚
(中國石油大學(華東)計算機與通信工程學院,山東 東營 257061)
考慮到石油管道的封閉性和復雜性,很難識別環境特征,將基于模糊神經網絡的多傳感器信息融合用于解決管道中管道機器人的導航問題。采用CCD攝像頭和距離傳感器來識別管道中的障礙物和彎道,并根據環境信息制定控制決策。建立了機器人物理模型和模糊神經網絡拓撲結構,并對神經網絡進行了學習訓練。最后,對其中一種環境類型進行了仿真驗證,證實了算法的有效性。
多傳感器信息融合;管道機器人;導航;模糊神經網絡
油氣管道被廣泛應用在石油、化工等行業,隨著使用時間的增長,問題不斷暴露,人為檢測既費力又不準確。另外,存在一些無法從管道外部進行檢測的在役管道,這就需要管道機器人來完成。為了使管道機器人能較好地完成管道環境識別和在役檢測,除了需要高效的移動載體和機載能源,還要有基于多傳感器的管道環境識別系統。多傳感器的信息融合技術是提高管道機器人智能化的一項關鍵技術,主要用來解決機器人自主定位、障礙物識別及導航等問題[1]。
在機器人導航中,需要多個傳感器來感知外部環境。單目CCD傳感器采集雖然速度快、圖像處理知識豐富,但不能獲得目標的距離信息;而采用雙目視覺傳感器又具有計算量復雜、實時性差的問題[2]。距離傳感器可以彌補視覺傳感器的不足,能夠提供目標的距離信息。現在已經有許多利用單目視覺和距離傳感器等來實現移動機器人自主導航的研究。吉林大學的王榮本等通過單目視覺與激光雷達建立傳感器信息融合系統,用于解決機器人前方障礙物探測與三維信息獲取的問題,但精度有待提高[3]。南開大學自動化系的劉先恩等人通過聲納傳感器和CCD攝像機對環境進行探測,獲得環境特征,并采用切線法進行路徑規劃[4]。Ohya A等人利用車載攝像機和超聲波傳感器研究了基于視覺導航系統中的避碰問題[5]。上述研究大多在室內或者走廊的環境下進行,很少有將多傳感器信息融合用于管道機器人中。本文嘗試將多傳感器信息融合用于管道機器人的自主導航中。
采用模糊神經網絡信息融合算法對CCD攝像機、超聲波傳感器、紅外傳感器得到的信息進行融合處理,識別管道環境特征,為管道機器人的自主導航提供決策依據。
1 管道機器人傳感器布局
管道機器人主要采用CCD攝像機和距離傳感器來實現機器人的環境探測。傳感器分布在管道機器人的不同部位,以檢測不同方向的信息,識別管道環境。由于管道是封閉的,所以還需要配備相應的照明系統。圖1為管道機器人傳感器布局示意圖,其中,1為觸覺傳感器,當其他傳感器失效時,作為輔助傳感器使用,分別安在4個角;2為紅外傳感器,安裝在兩側,檢測與管壁的安全距離;3為超聲波傳感器,用于檢測前方的彎道和障礙物;4為CCD攝像頭,用于檢測障礙物位置和大小;5為管道環境,6為驅動輪。

2 模糊神經網絡信息融合算法
2.1 模糊神經網絡概述
神經網絡學習收斂性差,不適合表達基于規則的知識,而模糊邏輯控制規則過多,缺乏自學習和自適應能力[6]。將兩者結合形成模糊神經網絡(FNN)可以實現優勢互補,能夠實現模糊規則的自動獲取和隸屬函數的自動生成[7]。基于T-S模型的模糊神經網絡具有局部逼近的功能,而且具有模糊邏輯和神經網絡兩者的優點。
2.2 模糊神經網絡拓撲結構
將模糊系統表達成神經網絡結構,可得到一種模糊神經元網絡。這種模糊神經元網絡一般分為前層、中層和后層,前層實現模糊化,中層實現模糊推理,后層實現反模糊化[8]。模糊神經網絡由一些基本神經元組成,該神經元的輸入是與其相連的神經元輸出和連接權重作用而得到的,分為五層,模糊神經網絡的拓撲結構如圖2所示。
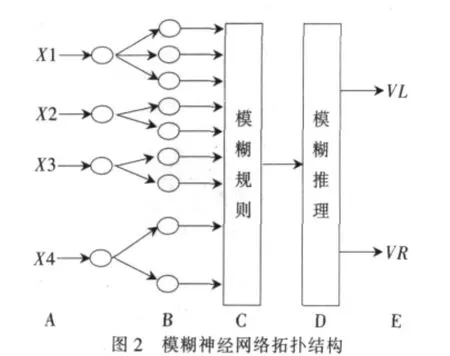
A層為輸入層,將傳感器得到的距離信息和經過處理的圖像信息傳入下一層神經元,節點函數為:

B層為模糊化層,每個節點代表一個語言值,節點個數為輸入量的模糊分割數之和。超聲波傳感器得到的距離信息,分為近、中、遠三類,分別記為 Near、Mid、Far。紅外傳感器得到的信息分為近和遠兩類,記為N、F。對CCD攝像機采集到的圖像進行預處理,分離出障礙物,得到障礙物的邊緣信息(為簡單起見采用矩形區域表示),根據透鏡成像原理的坐標變換關系式,將矩形區域左右邊緣的坐標信息轉化為世界坐標系下的坐標。分為左邊緣距管道軸線的最短距離和右邊緣距管道軸線的最短距離兩類,記為L、R,數值越小障礙物越靠近中間,說明越危險。模糊化層的作用是用該神經元產生屬于各語言變量值的模糊隸屬函數,本文采用高斯函數。節點函數為:

其中,cij、dij分別為隸屬函數的中心和寬度。
C層為模糊規則層,用神經元節點表示每條規則,用于匹配模糊規則的前件,計算每條規則的適用度。該層的節點數為4個輸入量的模糊分割數之積。節點函數表示為:

D層節點數與C層相同,能夠得到輸出融合值的模糊量,起到歸一化的作用,加權系數通過訓練得到。節點函數為:

E為輸出層,實現清晰化計算,這里定義輸出分別為左右輪的速度,即 VL、VR,選擇輪子速度為[-400,-200,-100,0,100,200,400]——[NF,NS,NM,ZERO,PS,PM,PF],單位為mm/s。對應的節點函數為:

2.3 模糊規則的建立
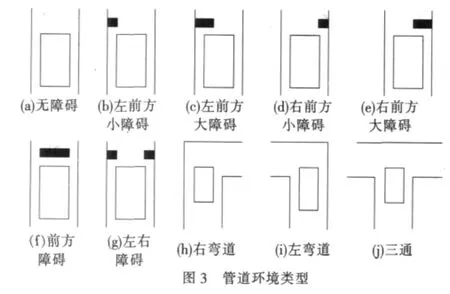
由經驗分析可知,影響機器人前進的控制因素主要是左、前、右3個方向的障礙物距離信息、大小和方位,當管道機器人在管內運行時,若遇到障礙物或者彎道就要采取相應的策略,控制速度、避障或者清除障礙。經過分析,將管道的環境分為如圖3所示的10種類型。
對于有障礙物的情形,根據模糊分割中的模糊變量,可以得到相應的規則。下面對部分類別進行分析。
(1)當環境類型為圖 3(b)時,左前方有小障礙物,列出如下主要的模糊規則:
①IF X1=Near AND X2=Y AND X3=Y AND X4=L THEN VL=PS AND VR=PS-50;
②IF X1=Mid AND X2=Y AND X3=Y AND X4=L THEN VL=PS AND VR=PS;
③IF X1=Mid AND X2=Y AND X3=Y AND X4=L THEN VL=PM AND VR=PM;
④IF X1=Far AND X2=Y AND X3=Y AND X4=L THEN VL=PF AND VR=PF;
(2)對于環境類型為圖3中(h)的情形,這里簡單認為,左邊和前方同時存在障礙物,并且右方不存在障礙物,模糊規則如下:
①IF X1=Near AND X2=Y AND X3=N AND X4=LTHEN VL=PS AND VR=PS-50;
②IF X1=Mid AND X2=Y AND X3=N AND X4=L THEN VL=PS AND VR=PS;
③IF X1=Mid AND X2=Y AND X3=N AND X4=LTHEN VL=PM AND VR=PM;
④IF X1=Far AND X2=Y AND X3=Y AND X4=L THEN VL=PF AND VR=NF;
同理可以得到其他環境類型的模糊規則。
2.4 學習算法推導

其中,cij、dij為隸屬函數的中心和寬度,需要調整。另外網絡權值ωj也需要調整。
在學習過程中對權值及隸屬函數的調整可用式(7)~(9)表示:
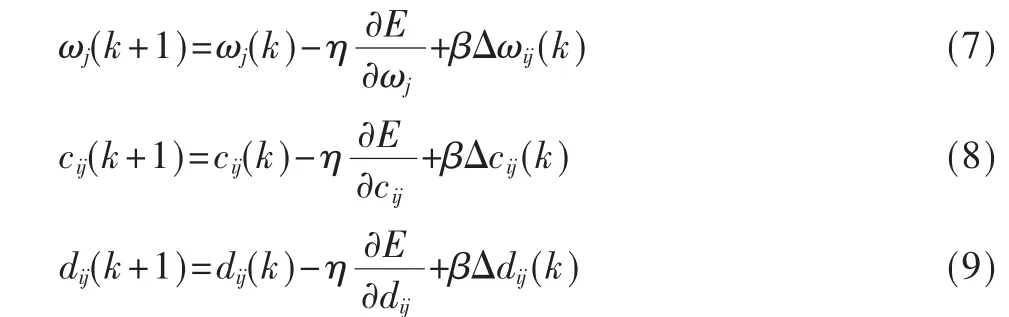
其中,η為學習率,β為動量系數。網絡通過不斷地修正權值和隸屬度參數,使網絡的輸出誤差達到最小,利用上式的進一步推導可完成神經網絡學習算子的調整,直至系統穩定。
3 仿真驗證
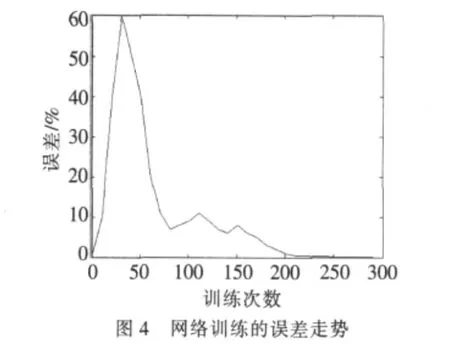
模糊神經網絡的重要組成部分是BP神經網絡。訓練樣本來自模糊規則組成的樣本,結合BP算法訓練網絡,BP訓練過程中的樣本誤差曲線如圖4所示,可以看出,訓練250次后,網絡逐步趨于穩定。
管道機器人通過前方的超聲波傳感器檢測前方的障礙物,通過兩側的紅外傳感器檢測與側壁的安全距離。若沒有發現障礙物和彎道,則沿管道中軸線正常行駛;當檢測到有距離較近的障礙物時,則開啟CCD攝像機,進行位置和大小的確定,以決定清除障礙物還是避開障礙物;當與側壁的距離小于安全距離時,則進行必要的位姿調整。
表1為超聲波傳感器和紅外傳感器測得的部分距離數據,編號 1代表前方的超聲波傳感器,編號 2、編號3分別為左側和右側的紅外傳感器,編號4為CCD攝像機得到的圖像信息經處理后的距離值。對表1中數據分析可得,環境類型為管道左前方存在小障礙物。表2為表1中數據送入訓練好的神經網絡后得到的部分數據的隸屬度。圖5所示為管道機器人行駛中,左右驅動輪的期望輸出速度值與實際輸出值。由圖5可知,實際輸出與期望輸出值的誤差較小,能夠滿足實際要求。
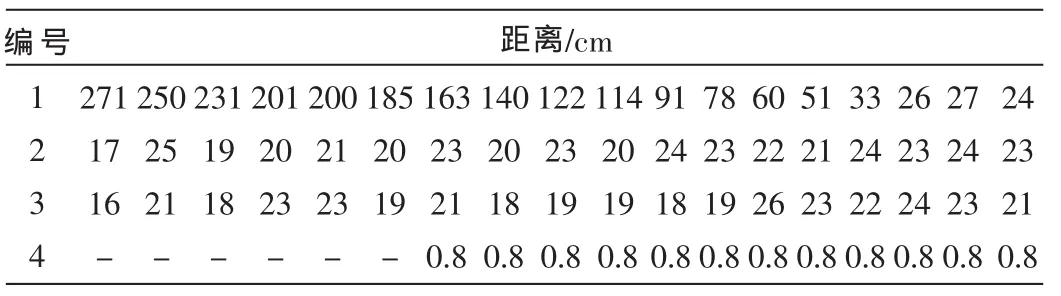
表1 距離傳感器測得的距離值
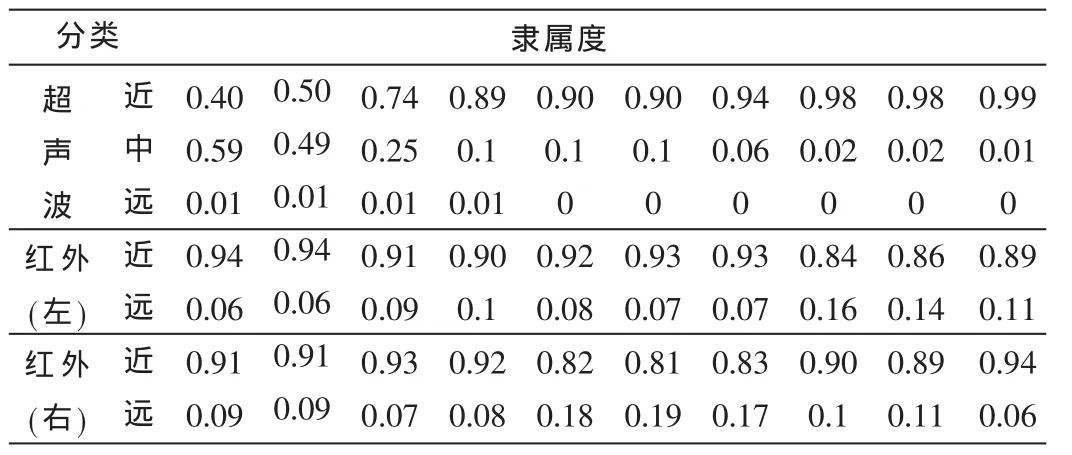
表2 測得距離的隸屬度
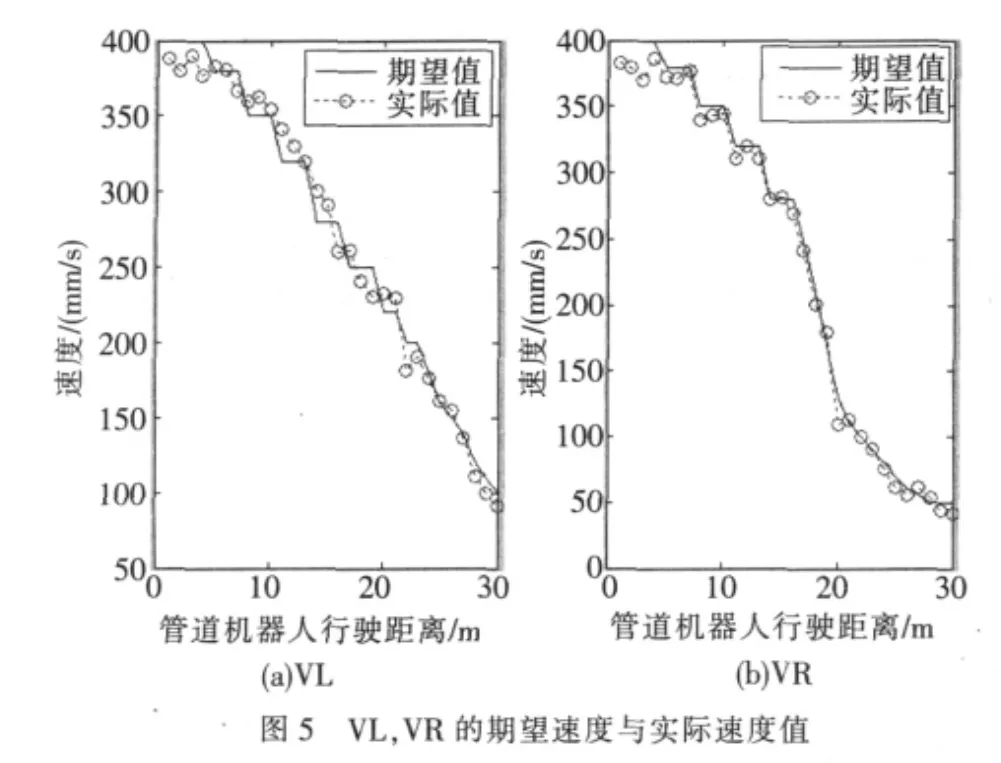
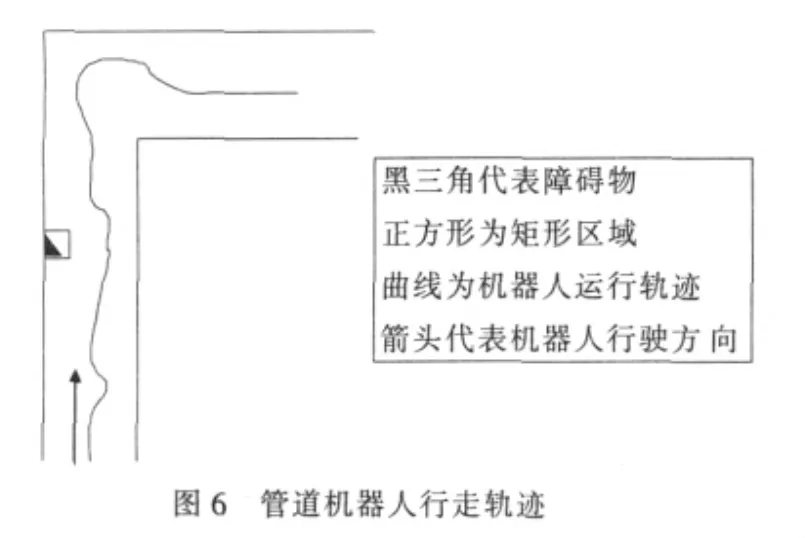
圖6所示為管道機器人的行走軌跡,黑色區域為障礙物,矩形框為圖像信息經處理后得到的矩形區域。當沒有檢測到障礙物時,沿管道中軸線行駛;當檢測到有較近障礙物時,啟動避障程序。可見機器人能夠較好地避障和通過彎道。
仿真試驗結果表明,管道機器人可以探測到障礙物,得到其距離、大小和方位信息,并且能夠采取相應的避障措施。
采用模糊神經網絡對超聲波傳感器、紅外傳感器和CCD攝像機采集到的信息進行融合,可以較為準確地探測到障礙物及彎道,根據障礙物信息進行避障,實現自主行走。實驗環境較為簡單,采用的前方障礙物探測的超聲波傳感器精度不是很高,這是今后要改進的方向。
[1]HALLD L,LLINAS J.An introduction to multisensor data fusion[J].Proceeding ofthe 1998 IEEE International Symposium on Circuits and Systems,1998(6):537-540.
[2]項志宇.針對越野自主導航的障礙物檢測系統[J].東南大學學報:自然科學版,2005,35(2):71-74.
[3]趙一兵,王榮本,李琳輝,等.基于多傳感器信息的前方障礙物檢測[J].計算機工程與應用,2007,43(26):174-178.
[4]劉先恩,趙學敏.基于多傳感器的移動機器人路徑規劃[J].計算機工程,2008,34(8):213-215.
[5]CHOSET H,NAGATANI Keiji,LAZAR N A.The arctransversalmedian algorithm: a geometric approach to increasing ultrasonic sensor azimuth accuracy[J].IEEE Transactions on Robotics and Automation (S1042-296X),2003,19(3):513-522.
[6]周中良,于雷,李永華.基于信息融合的改進型模糊神經網絡[J].計算機應用,2006,26(6):117-118.
[7]王檀彬,陳無畏,李進,等.多傳感器融合的視覺導航智能車避障仿真研究[J].系統仿真學報,2009,21(4):1015-1019.
[8]BARSHAN B,BASKENT D.Morphological surface profile extraction with multiple range sensors[J]. Pattern Recognition(S0031-3203),2001,34(7):1459-1467.
Application of fuzzy neural networks information fusion in the pipeline robot navigation
Li Qingyun,Yang Wenkai,Li Yang
(College of Computer and Communication Engineering,China University of Petroleum,Dongying 257061,China)
It’s difficult to identify environmental characteristics for the closed oil pipeline and complexity,and the multi-sensor information fusion algorithm based on fuzzy neural networks was used to solve the problem of pipeline robot navigation in the pipeline.Using CCD camera and some distance sensors to identify obstacles and emerging pipeline corners and to develop decisionmaking.This paper establishes the robot physical model,fuzzy neural network topology and network learning training.At last,the simulation of one type of environment confirmed the validity of the algorithm.
multi-sensor information fusion;pipeline-robot;navigation;fuzzy neural networks
TP393
A
1674-7720(2011)03-0082-04
國家自然科學基金資助項目(50674099);中石油風險基金項目(060725)
2010-09-05)
李慶云,女,1968年生,碩士,副教授,主要研究方向:管道機器人控制。
楊文凱,男,1984年生,碩士研究生,主要研究方向:智能控制。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中老年保健(2021年11期)2021-08-22 03:15:44
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2020年6期)2020-02-01 06:28:50
