仿牛鼻鲼機器魚胸鰭的時間非對稱擺動研究
2011-01-29 08:46:38楊少波韓小云謝海斌
中國機械工程 2011年5期
楊少波 韓小云 邱 靜 謝海斌
國防科學技術大學,長沙,410073
仿牛鼻鲼機器魚胸鰭的時間非對稱擺動研究
楊少波 韓小云 邱 靜 謝海斌
國防科學技術大學,長沙,410073
針對以胸鰭升力模式推進的牛鼻鲼在胸鰭扇動時存在時間上的非對稱擺動問題,分析了牛鼻鲼這一泳動特征的力學含義,并通過仿牛鼻鲼機器魚開展了時間非對稱擺動的研究。首先建立了時間非對稱擺動的數學模型;然后在一系列的不對稱系數下進行了機器魚的泳動實驗,發現存在一個不對稱系數的較佳范圍,并且當不對稱系數為0.56時,機器魚的泳動速度最大;最后通過機器魚的水動力實驗研究,討論了不對稱系數對水動力的影響規律。結果表明,牛鼻鲼在實際游動過程中通過上揮急回的方式拍動,特別是經常以不對稱系數0.56工況方式扇動,可以獲得更好的推進性能。
胸鰭升力模式;牛鼻鲼;機器魚;時間非對稱擺動;水動力
0 引言
由于海洋資源的開發和海洋探索的需要,胸鰭模式水下推進目前正成為國內外研究的熱點[1-5]。牛鼻鲼的胸鰭向兩側伸展呈三角形,鰭身融合。它們的游泳方式非常優雅,而又不失敏捷,僅僅通過一對寬大胸鰭的上下撲動就產生必需的推力和升力,屬于典型的胸鰭升力模式推進[6]。牛鼻鲼胸鰭升力模式相比于其他推進模式,具有擺動頻率低、負重空間大、升力大、機動性能優良等優點。
Heine[7]對牛鼻鲼進行過詳細的運動觀測,并記錄了牛鼻鲼鰭尖的速度和位置,他指出:相對胸鰭水平位置,上揮行程末位置的幅度要比下拍行程末位置的幅度大很多,即胸鰭上下扇動幅值不對稱(我們稱這種不對稱擺動為胸鰭的空間非對稱擺動);另外,鰭尖的扇動變化并不是典型的正弦波動,表現在上揮行程的時間和下拍行程的時間并不對稱,牛鼻鲼上揮行程時間約為下拍行程的一半(我們稱這種不對稱擺動為胸鰭的時間非對稱擺動)。
關于胸鰭的空間非對稱擺動,Rosenberger[8]曾通過研究鲼目魚的運動方式與生存適應性的關系指出,牛鼻鲼之所以采取這種不對稱扇動方式,是因為牛鼻鲼的眼睛長在吻部上端兩側的位置,向下扇動幅值較大時會影響到其對海底面的視野觀察范圍,進而影響覓食;而對于其他以胸鰭升力模式推進的鰩鲼和蝠鲼,它們游動時不存在這種空間非對稱擺動。因此,本文認為這種空間非對稱擺動不屬于胸鰭升力模式推進的典型特征,只屬于牛鼻鲼為適應生存而顯現的個別特征。
Hu[9]嘗試通過數值研究的手段討論了二維翼型的時間非對稱擺動的性能,特別對俯仰、浮沉和偏航的非對稱擺動進行了討論,指出了非對稱的擺動運動能給機動運動產生較大的推力和升力。
據研究[7-8,10],牛鼻鲼的前進速度和胸鰭擺動參數具有以下的關系:要提高牛鼻鲼的前進速度,一方面可通過增加最大擺幅;另一方面可通過增加鰭尖的最大速度。鰭尖的速度增加可通過提高肌肉力的形式來實現,但或許這并不是一種高效的游動方式。我們注意到,通常情況下,牛鼻鲼游動時上揮行程要快些,而下拍行程要慢些,或許這種時間非對稱的擺動就是一種高效的游動方式。
牛鼻鲼在胸鰭的每個拍打周期中,推力都有兩次波峰[7,11],而且上揮行程的波峰值要高一些,即使是上下對稱拍打時也是如此。可以推理,上揮行程時間變短時,鰭尖的上揮速度進一步增大,推力應該進一步增大。因此,牛鼻鲼胸鰭的這種時間非對稱游動將進一步加大兩個推力峰值的不對等程度,從而影響做功的多少。
1 實驗裝置及原理
本課題組研制的仿牛鼻鲼機器魚的設計結構和“Cownose-Ⅱ”機器魚的實物模型見圖1[12]和圖2。整個機器魚弦長 300mm,最大展寬500mm,總質量為1kg。機器魚的胸鰭由1mm厚的硅橡膠制成,通過前后間隔均勻排列的鰭條按照一定相序擺動來模仿牛鼻鲼胸鰭的扇動。
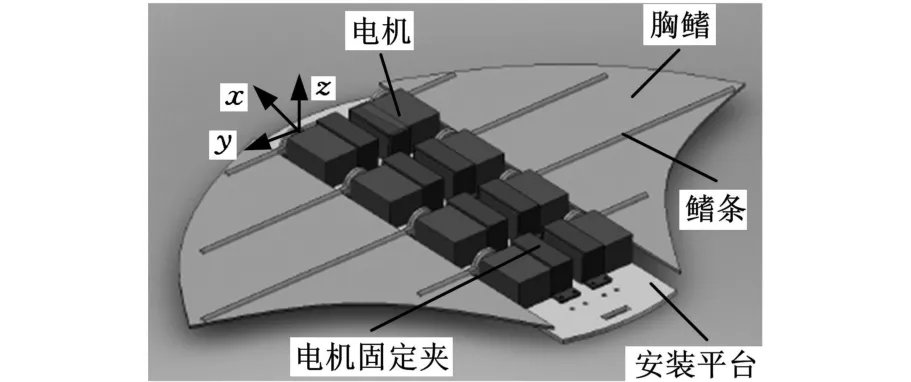
圖1 機器魚結構設計

圖2 “Cownose-Ⅱ”機器魚實物模型
本文采用小載荷盒式氣動力天平測量機器魚的水動力。氣動力天平是一種專用于測量作用在風洞模型上的空氣動力的測量裝置,由于模型上空氣動力的方向是變化的,因此,氣動力天平必須先將作用于模型上的空氣動力按一定的直角坐標軸系分解成幾個分量,然后分別加以測量[13],整個測量裝置見圖3。
小載荷盒式天平屬于應變式六分量天平。盒式天平分為浮動框和固定框兩部分。浮動框與機器魚相連接,固定框與雙支桿式的支撐系統相連接。固定框上有8個懸臂式的應變梁,其表面上貼有應變片,可測6個水動力(矩)分量。浮動框與固定框之間用8根連桿相連。連桿的兩端有雙向彈性鉸鏈,使連桿只傳遞拉(壓)力,懸臂式應變梁只受到所測水動力分量的作用。應變梁1、2、3和4承受Fy、Mz和M x的作用,應變梁5和6承受Fz和M y的作用,而應變梁7和8承受Fx的作用。通過測量各電路分量,可得到八通道電壓信號,將八通道電壓信號代入轉換公式,通過迭代計算便求得六分量水動力。
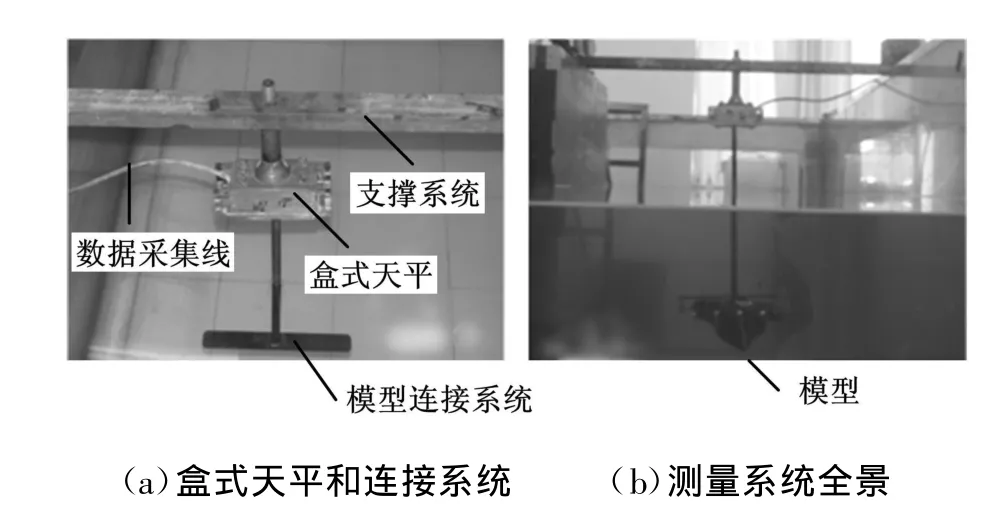
圖3 水動力測量裝置圖
2 數學模型
類比曲軸運動機構的急回轉運動,本文對胸鰭的時間非對稱擺動進行描述,并令鰭條的時間非對稱擺動方程為

其中,ω為頻率;φ為相鄰鰭條的相位差;P定義為急回系數,反映上揮行程的時間和下拍行程的緩急。當P越大,上升行程越緩慢;而當P越接近1,上升行程越急促。若令頻率f=1Hz,相鄰鰭條的相位差φ=0,則系數 P對擺動波形的影響見圖4。
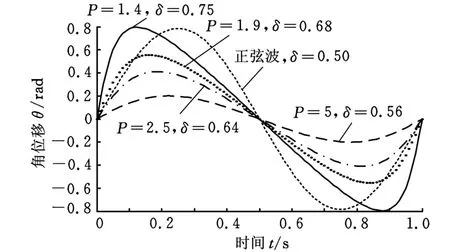
圖4 系數P對擺動波形的影響
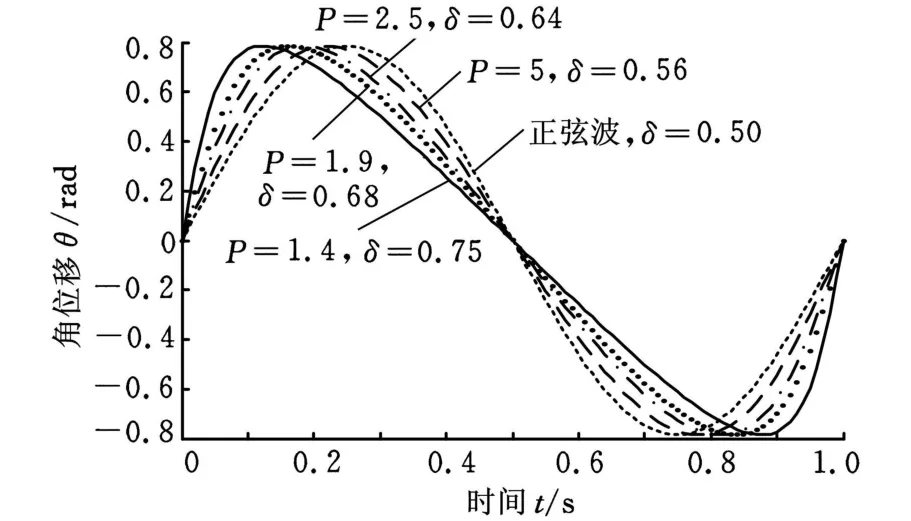
圖5 幅度增益對波形的補償
牛鼻鲼實際游動時的不對稱系數基本在0.50~0.67范圍內。本文為討論不對稱系數對機器魚游動速度和水動力的影響,給出了時間非對稱擺動時的幾種工況。此時,相對不對稱系數0.75、0.68、0.64和0.56,分別對應的幅度增益為0.9875、1.4171、1.9094和 3.9008。
3 游動實驗及分析
實驗水池的長×寬×高分別為4m×1.8m×1.5m,水流速度靜止,水深0.8 m。水池長度方向上貼有刻度紙,用來計量機器魚的游動位置。實驗中,使用200萬像素DCR-TRV 60E Sony攝像機對機器魚的運動進行每秒24幀拍攝,通過幀處理得出機器魚的運動數據。圖6所示為機器魚在頻率1Hz,最大擺幅45°,相鄰鰭條相位差48°工況下,不對稱系數為0.5時的直線游動序列。
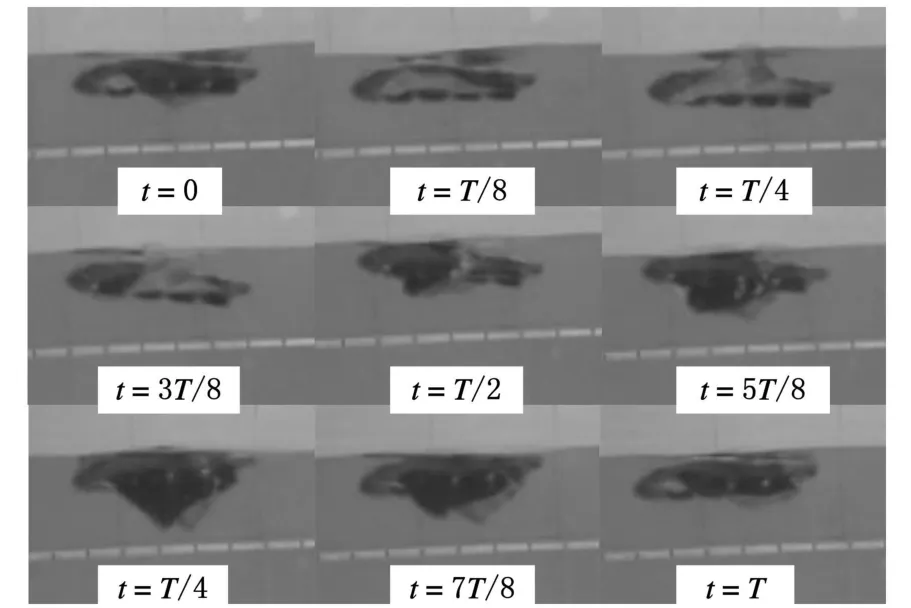
圖6 機器魚直線游動序列
在這幾種時間非對稱擺動的工況下,對機器魚進行游動實驗,獲得了前進速度與不對稱系數的關系(圖7),其中,圓點所示為實測值,BL表示身長,是相對模型長度的量。由圖7可見,胸鰭的時間非對稱擺動存在一個較優范圍,即在不對稱系數約為0.50~0.72的范圍,胸鰭的擺動都可以獲得較大的速度。其中,在不對稱系數0.56附近取得最大值。這能夠初步解釋牛鼻鲼游動的時候為何總喜歡采用上揮急回的方式拍動。
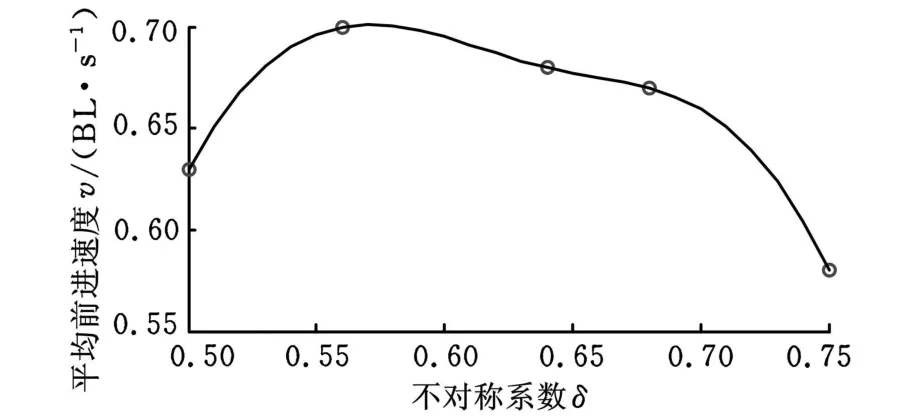
圖7 前進速度隨不對稱系數的變化
4 水動力實驗及分析
利用水動力測量裝置測量柔性鰭條機器魚模型的水動力。當機器魚從靜止啟動到周期穩定擺動,分別得到對稱時的水動力結果(圖8)以及不對稱系數為0.75、0.68和0.56的水動力結果(圖9、圖 10和圖 11)。
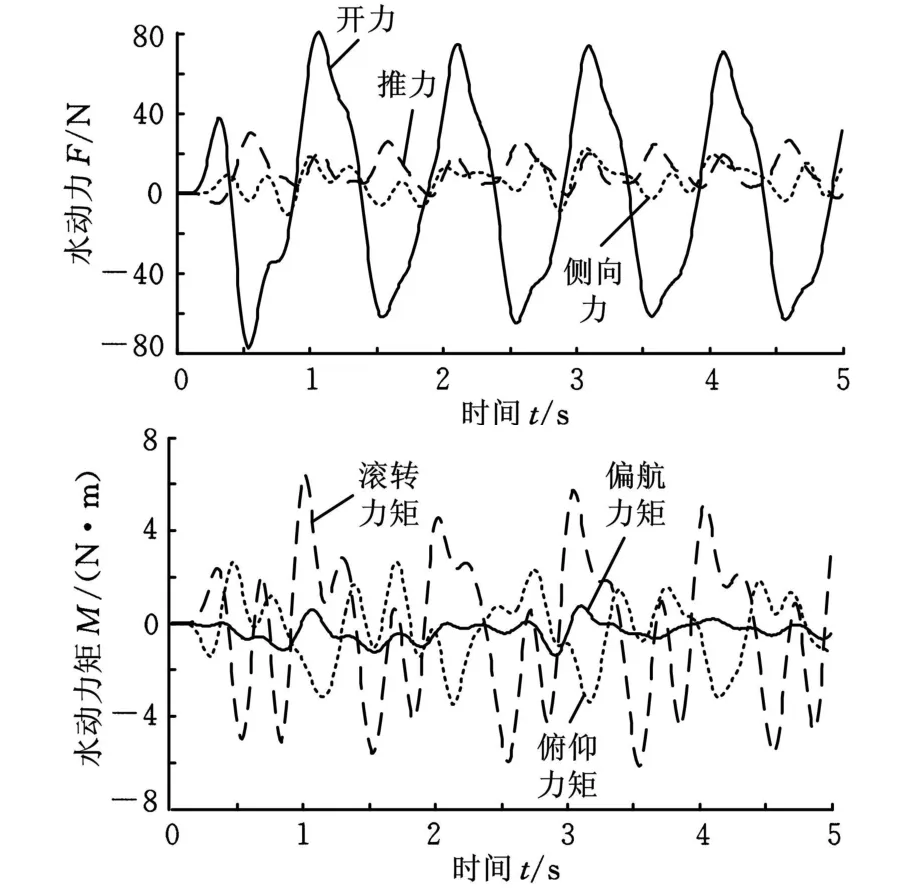
圖8 柔性鰭條對稱運動水動力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.50)
當鰭條對稱擺動時,也即不對稱系數為0.50時,通過計算得到,推力平均值約為10.849N,升力平均值約為1.2384N,僅有推力平均值的十分之一;側向力平均值為6.7612N,表明機器魚模型有較大的偏移趨勢;俯仰力矩卻變小,平均值約為-0.4253N?m,說明機器魚模型游動時俯仰角變小,游得更加平穩。
在不對稱系數為0.75時,測量的推力平均值約為10.38N,相比對稱擺動的推力略有減小,推進性能略有下降;升力平均值約為3.3794N;側向力為-0.9168N,表明左右胸鰭產生的側向力基本對稱;而俯仰力矩為-0.5787N?m,表明模型游動更平穩。
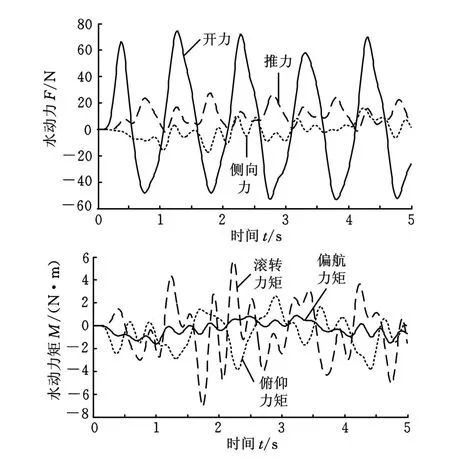
圖9 柔性鰭條不對稱運動水動力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.75)
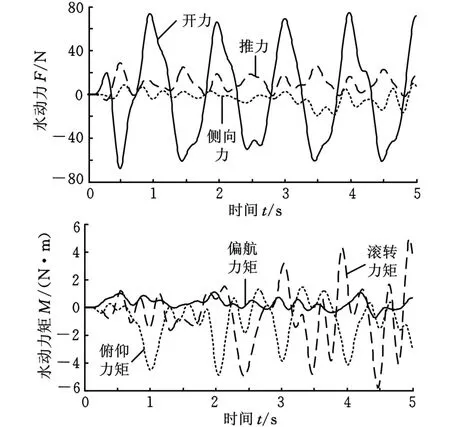
圖10 柔性鰭條不對稱運動水動力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.68)
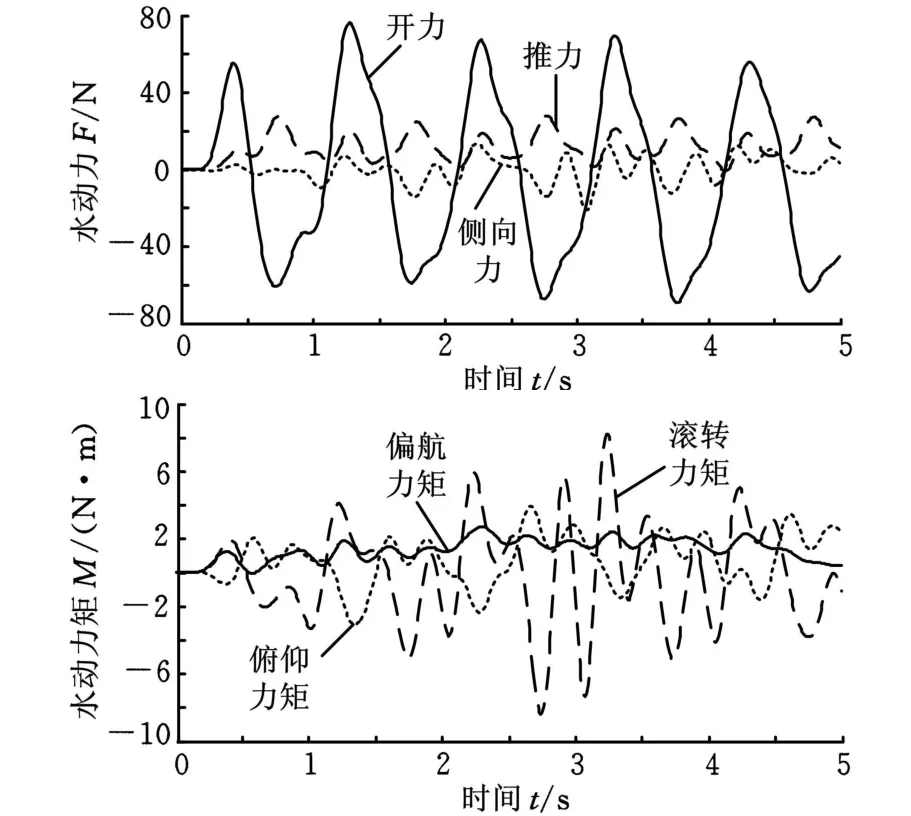
圖11 柔性鰭條不對稱運動水動力作用(f=1H z,θmax=45°,Δφ=48°,δ=0.56)
在不對稱系數為0.68時,測量的推力平均值約為11.886N,相比對稱擺動的推力增大9.5%;升力平均值約為 4.4314N;側向力平均值約為-3.3448N,表明左右胸鰭產生的側向力不對稱;而俯仰力矩約為-0.1641N?m,模型游動時的俯仰角變得更小,游動更趨平穩。
在不對稱系數為0.56時,測量其推力平均值約為12.189N,相比對稱擺動的推力增大12%;升力平均值約為-5.2363N;側向力平均值約為0.2306N,左右胸鰭產生的側向力又基本對稱;而俯仰力矩約為0.7496N?m,仍然保持較好的游動平穩性能。
可見,對應著不同的不對稱系數,模型測量得到的推力性能變化規律與隨速度的變化規律一致,說明牛鼻鲼胸鰭升力模式在游動時確實存在著時間非對稱較佳范圍和最佳不對稱系數。
同時,在時間非對稱擺動工況下,機器魚在較佳范圍內的推進性能不僅得到增強,而且左右胸鰭的側向力對稱性能也變好,同時由于俯仰角變化較小,模型的游動也更趨于平穩。
5 結束語
利用機器魚模型對胸鰭的時間非對稱擺動進行研究,從模型的游動實驗和水動力實驗結果可以分析出,采用胸鰭升力模式推進的魚類在游動時,存在一個不對稱系數的較佳范圍,并且具有最佳的不對稱系數。
在時間非對稱擺動工況下,機器魚在較佳范圍內的推進性能不僅得到增強,而且左右胸鰭的側向力對稱性能也變好,同時由于俯仰角變化較小,模型的游動也更趨于平穩。由此可以解釋,牛鼻鲼在實際游動過程中通過這種上揮急回的方式拍動,特別是經常以不對稱系數0.56工況方式扇動,獲得了更好的推進性能,實現了高效地游動。
[1] Blake R W.Influence of Pectoral Fin Shape on Thrust and Drag in Labriform Locomotion[J].J.Zoo l.Lond.,1981,194:53-66.
[2] Westneat M W,Walker JA.Applied Aspects of MechanicalDesign,Behavior,and Performanceof Pectoral Fin Swimm ing in Fishes[C]//Proc.Special Session on Bio-Engineering Research Related to Autonomous Underwater Vehicles,10th Int.Symp.Unmanned Untethered Submersible Technology.Durham,NH,1997:153-165.
[3] H ewish M.Submarines to Cast off Their Shackles,Take on New Roles[J].Jane's Internationa l Defense Review,2002,3:35-43.
[4] H ishinuma K,Konno A,Mizuno A,et al.Analysis Method o f Flapping Fin Motion for Manta-like Underwater Robot[C]//Proceedings of 7th International Symposium on Marine Engineering.Tokyo,2005:180.
[5] Xu Y C,Zong G H,Bi S S,et al.Initial Development of a Flapping Propelled Unmanned Underwater Vehicle[C]//Proceedings of the IEEE Interntional Conference on Robotics and Biomimetics.Piscataway,2007:524-529.
[6] SfakiotakisM,Lane D M,Davies JBC.Review of Fish Sw imm ing Modes for Aquatic Locomotion[J].IEEE J.Oceanic Eng.,1999,24(2):237-252.
[7] H eine C E.Mechanics of Flapping Fin Locomotion in the Cow nose Ray,Rhinop tera Bonasus(Elasmobranchii:Myliobatidae)[D].North Carolina:Duke University,1992.
[8] Rosenberger L J.Pectoral Fin Locomotion in Batoid Fishes:Undulation Versus Oscillation[J].Journal of Experimental Bio logy,2001,204(2):379-394.
[9] H uW R.Performance of an Asymmetric Oscillating Foil[C]//The Fourth International Symposium on Aero Aqua Bio-mechanisms.Shanghai,2009:1-5.
[10] Yang Shaobo,Qiu Jing,Han Xiaoyun.K inematics Modeling and Experiment of Pectoral Oscillation Propu lsion Robot Fish[J].Journal of Bionic Engineering,2009,6(2):174-179.
[11] Clark R P,Smits A J.Thrust Production and Wake Structure of a Batoid-inspired Oscillating Fin[J].J.Fluid Mech.,2006,562:415-429.
[12] 楊少波,韓小云,張代兵,等.一種新型的胸鰭擺動模式推進機器魚設計與實現[J].機器人,2008,30(6):508-515.
[13] 王鐵城.空氣動力學實驗技術[M].北京:航空工業出版社,1995.
Research on Pectoral FinsOscillating Asymmetrically in Time of a Cownose-like Robotic Fish
Yang Shaobo Han Xiaoyun Qiu Jing Xie Haibin
National University of Defense Technology,Changsha,410073
Before the asymmetricaloscillation in time of Cownose-like robotic fish was discussed,the mechanic hint behind the sw imming behaviorwasanalysed.Firstly,amathematicmodelof the fin rays oscillating asymmetrically in tim ewas set up;secondly,the sw imming experimentsof the robotic fish with a series of asymm etric coefficients werem ade,and the results show that it exits a better range of asymm etric coefficients,and while asymmetric coefficients is 0.56,the robotic fish attains the best forw ard velocity.Finally,the hydrodynam ic force of the robotic fish w ith these asymmetric coefficientswas tested,and the relations among each other were discussed.These results w ill reveal that the attention of the swimm ing behavior of Cownose ray may improve the propulsive,especially in the case of oscillating with the 0.56 of asymmetric coefficient.
lift-based mode of pectoral oscillation;cownose ray;robotic fish;oscillating asymm etrically in time;hyd rodynamic force
TP24
1004—132X(2011)05—0588—04
2010—02—23
國家自然科學基金資助項目(50405006);國防科學技術大學博士研究生創新基金資助項目(B060302)
(編輯 袁興玲)
楊少波,男,1975年生。國防科學技術大學機電工程與自動化學院博士研究生。主要研究方向為海洋仿生工程。發表論文10余篇。韓小云,男,1971年生。國防科學技術大學機電工程與自動化學院副教授。邱 靜,男,1964年生。國防科學技術大學機電工程與自動化學院教授、博士研究生導師。謝海斌,男,1977年生。國防科學技術大學機電工程與自動化學院講師、博士。