某風力發電機齒輪箱行星架的有限元分析
2011-02-01 01:41:14任文彬王碧石
科技傳播 2011年13期
任文彬,王碧石
大慶油田裝備制造集團銷售公司,黑龍江大慶 163311
0 引言
風力發電的過程就是將風能轉化為電能的過程。通常風輪的轉速很低,遠達不到發電機發電所要求的轉速,必須通過增速器齒輪副的增速作用來實現,而行星齒輪增速箱(文中簡稱為齒輪箱)是最為常見的一種。
行星架是齒輪箱中的關鍵零部件,工作時承受較大的隨機扭轉載荷。行星架一旦失效,會導致整個齒輪箱的失效、風力發電機停機,所以要在設計階段確保行星架不發生破壞
本文將運用有限元分析軟件ANSYS-WORKBENCH(AWB)對行星架進行線性靜力結構分析,證實該行星架符合風電的相關規定。
1 行星架有限元模型的建立
AWE的實體建模功能,比ANSYS有所提高,但相對于專業CAD軟件,還是有所欠缺。而AWE可以通過IGES格式導入由各個CAD軟件所作的實體模型,而且對于主流的CAD軟件還集成有專門的插件,避免了以往通過IGES格式導入數據而造成的單元丟失等問題,保證了最好的CAE結果。
1.1 三維模型的建立
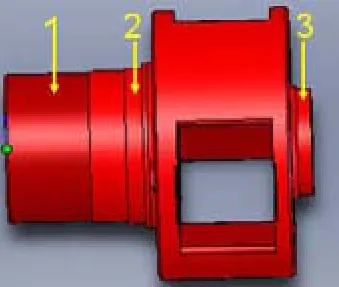
圖1 行星架的三維實體模型
根據廠家提供的圖紙,采用三維CAD軟件Solidworks,建立了行星架的三維實體模型,如圖1所示。
將行星架的三維圖導入到AWB中,在“Engineering Data”菜單下輸入行星架的的材料參數,以便建立行星架的有限元模型。本文中,行星架采用QT700-2,查找文獻1可知QT700-2的抗拉強度為700MPa,屈服強度為420 MPa,密度為7 300kg/m3,彈性模量為1.55GP,泊松比為0.27。
1.2 網格劃分
網格的質量對分析的結果有重要的影響,網格劃分越細,結點越多,計算結果越精確,不過網格加密到一定程度后計算的精度的提高就不明顯了,而且越密集的網格就意味著需要花費更多的計算時間。所以網格劃分的原則是:對零件受力處和應力梯度變化明顯處(如應力集中處)細化網格,對應力、變形變化平緩的區域不必細化網格。
AWB軟件中,默認利用10節點的四面體單元和20節點的六面體單元劃分單元。由于該行星架的尺寸較大,不宜選用過細的網格劃分,所以對其采用AWB默認的網格劃分,并在扭矩輸入的部分1(見圖1),可能發生應力集中的圓角過度處和與軸承配合的部分2、3上細化網格。網格劃分的結果共有77367個單元,126389個節點。
2 受力與約束
在工作過程中,行星架中的部分1與脹緊套相配合,并將脹緊套傳遞來的工作扭矩傳至行星輪系。在行星架的工作過程中,行星架所受的載荷有三個來源:自身產生的重力、脹緊套給予的預緊力和由葉輪方向輸入的工作扭矩。所以在行星架的線性靜力結構分析過程中,應該考慮這三種載荷的共同作用。
由于部分1的結構較為簡單,所以將轉矩轉化為三個大小相等,成逆時針分布的三個力,施加在與太陽輪配合的三對孔上。脹緊套的預緊力以Press(壓力)的形式施加在部分1上。重力則以標準的地球重力加速度施加在整個系統中。
在約束方面,由于部分1的結構較為簡單且應力集中較小,故將其設為Fixed Support(固定約束),約束全部六個自由度;部分2、3是與軸承配合的部分,故施加Cylindrical Support(圓柱面約束),約束5個自由度,僅允許切向旋轉。
具體的受力與約束情況如圖2所示。
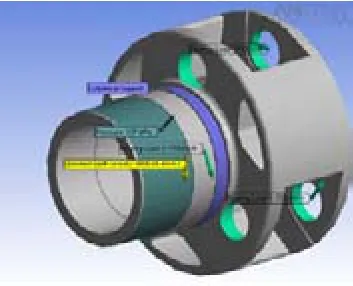
圖2 行星架的受力和約束
3 靜力學分析結果
線性靜力結構分析可得到多種不同結果:各個方向和全部的變形,應力應變分量,主應力應變或者應力應變不變量,支反力等。本文主要要得到行星架的應力與變形的相關結果。
行星架的應力云圖如圖3所示,等效應力(von-Mises)的范圍為0MPa ~191MPa,最大應力出現在既處于過度圓角上,又靠近行星架與行星輪相連接的位置,該位置產生了較大的應力集中,符合力學原理。行星架的最大應力遠小于QT700-2的許用應力,符合設計要求。
行星架主要的變形是因扭轉產生的,所以這里采用柱坐標系,觀察零件在Y軸方向上的旋轉位移。柱坐標系和變形云圖如圖4所示,最大變形為-0.605mm(即零件在逆時針方向旋轉了0.605mm),出現在最外圈。根據公式1,算出扭轉角φ等于0065°,小于許用的0.292°(文獻2中規定),證明了行星架的變形量符合設計要求。

r表示半徑,s表示位移,φ表示扭轉角
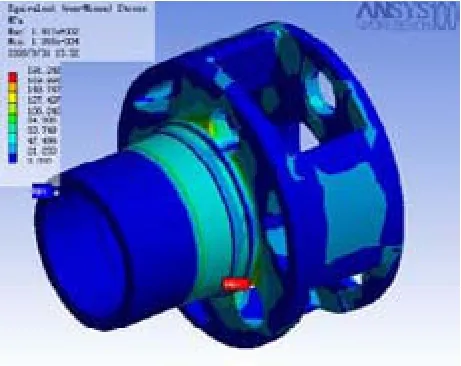
圖3 行星架的應力云圖
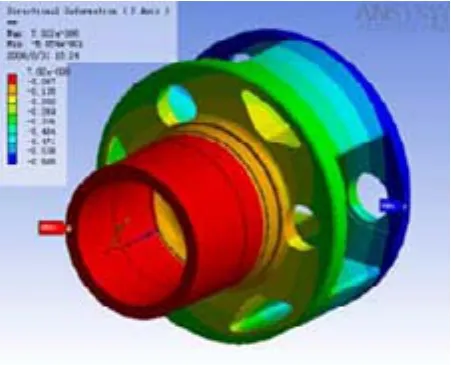
圖4 行星架的位移云圖
4 結論
本文通過有限元法對風力發電機齒輪箱的行星架進行了靜力學分析。通過靜力學分析可以了解行星架的應力和變形情況,證明該行星架的設計符合相關標準的要求。本文的結論有助于對行星架的結構進行進一步優化,本文的方法也可以用于其它產品的開發階段,有利于提高產品設計的一次通過率,降低研發成本和縮短研發周期。
[1]科標工作室.國內外金屬材料手冊[M].南京:江蘇科技出版社,2005.
[2]中國船級社.風力發電機組規范[M].北京:人民交通出版社,2003.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
