基于功能結構樹的復雜系統SDG自動建模研究
2011-02-01 01:39:38左洪福
中國機械工程 2011年5期
周 虹 左洪福
南京航空航天大學,南京,210016
基于功能結構樹的復雜系統SDG自動建模研究
周 虹 左洪福
南京航空航天大學,南京,210016
為獲取復雜系統SDG建模時所需的深層知識,探討了復雜系統工作機理分析過程,提出了功能結構樹概念。功能結構樹作為構建SDG診斷模型的平臺,組織存儲系統功能、行為、故障等知識。給出了從系統功能結構樹構建關聯矩陣進而自動建立過程動態SDG模型的方法。與手工建模相比,該方法省時省力、不易出錯、易維護,并能滿足SDG模型需要隨實際系統工作狀態變化而動態調整的要求。以A 320飛機氣源系統SDG建模為例,說明了該方法的應用。
功能結構樹;SDG建模;工作機理;故障診斷;關聯矩陣
0 引言
復雜系統故障診斷過程中,常常會遇到超出領域專家知識和經驗的疑難問題,符號有向圖(SDG)方法為系統過程變量間的因果關系和故障傳播路徑提供簡單的圖形化描述[1-2],是一種揭示系統潛在故障的有效方法[3]。診斷對象的SDG建模是其故障分析的基礎,目前關于SDG建模方法主要歸納為三種:基于數學模型方法、基于流程圖方法和基于經驗知識的方法[4],文獻[5-6]在此基礎上提出了層次SDG結構,采用有向圖分層推理策略提高診斷速度。但對于大型復雜系統故障診斷的SDG建模的實際應用,面臨以下幾個問題:①診斷知識規模龐大、種類多樣,建模之前必須用規劃化方法分析故障因果性、層次性和相關性信息,獲取并組織診斷對象結構、功能、行為等內在聯系的深層知識;②復雜系統故障關聯錯綜復雜,并且具有動態性和時效性,即故障之間的聯系與系統運行狀態故障發生時機具有很大關系[7],靜態SDG描述很難達到故障分析要求,SDG模型應該隨著工作狀況的變化隨時調整結構和參數;③對復雜的大系統而言,手工建立模型費時費力,容易出錯,并且如前所述SDG圖可能隨工況動態變化,因此十分需要通過計算機進行自動建模[8]。
針對這些問題,本文研究復雜系統的工作機理分析方法,并提出基于系統功能結構樹的復雜系統SDG模型自動構建過程。
1 復雜系統工作機理分析
為建立較為完備而準確的SDG模型,需要充分了解和認識診斷對象,獲得系統的深層知識。系統具有一定的功能,功能正常時表現出的行為是實現功能的過程,功能失效時的非預期行為則表現為故障模式,而結構是系統功能與系統行為的載體。因此,結構-狀態—行為—故障的組合是對系統的完備描述[9]。復雜系統工作機理分析內容應該包括系統結構層次性劃分、表征功能的過程變量定義、功能正常時的行為過程描述和功能失效時的故障模式分析。
1.1 復雜系統結構層次性劃分
復雜系統故障傳播的因果性和層次性與其結構層次性相關。復雜系統一般存在相對固定的分解結構[10],可以從其BOM(物料清單)中獲得。為了表達子系統之間的相互關系和由于結構之間相互聯系惡化而引起的故障,在BOM展現的系統結構基礎上,依據系統功能支配關系對物理對象進行組合調整,將診斷對象劃分成有序的遞階層次。最高層為診斷系統,實現系統功能;中間層是分系統或子系統,由不同的零部件互相協調共同完成子功能;最底層是零部件,以確定的物理作用原理和相應的物理結構實現功能元,如此形成一棵倒置的樹,將之稱為系統結構樹。
1.2 過程變量定義
系統結構樹體現了系統的結構和功能層次,對樹中每一節點,以功能是否相對獨立并能求得技術原理解為依據進行子功能(任務)分解。根據子任務剖面所經歷的事件和環境的時序,選擇影響和體現功能特征變化的變量,具體包括環境變量、狀態變量、操作變量。
(1)環境變量是分析對象的使用環境或相鄰其他子系統、零部件影響分析對象的環境因素的物理屬性(如輸入物理量關系和距離、連接方式等幾何關系)。
(2)狀態變量是表征分析對象狀態的一組獨立物理屬性值(如流量、液位、溫度、壓力)。
(3)操作變量是反映部件間的連接作用的系統部件或測試節點(如閥門、開關等)以及相關的儀表(如控制器、變送器等)。
選擇過程變量的原則是要有利于解釋故障的原因及后果。對每一過程變量依據故障發生和傳播的規律經反復試驗調整或統計后確定正常理論值,正常理論值是SDG模型瞬時樣本中獲得節點狀態的界限值判斷依據。由于實際運行工作條件多變,動態特性復雜,正常理論值可以是確定的閾值范圍,也可以是一狀態函數。
1.3 行為過程描述
用行為過程將分解的子功能具體化,即按照系統原理、子任務剖面經歷的事件和環境的時序,分析變量之間的物理作用或因果關系。為反映系統實際運行動態變化,描述行為過程的同時需要確定引起這種行為過程的環境變量及生效條件。變量之間的物理作用或因果關系根據其影響比率數值,歸納為兩種:
(1)定性因果關系。只分析系統變量間的增量或減量的定性關系,影響比率為1。
(2)半定性關系。定性方法中加入定量信息,不僅分析變量間的增量或減量定性關系,還依據被影響因素和影響因素變化的傳遞時間、增益、趨勢、過程、概率等定量信息計算影響比率。
選擇行為描述方法的主要因素是先驗的系統信息。當無法建立定量模型時,定性方法是自然的選擇,如果有可供利用的定量信息,那么就在定性方法的基礎上引入定量信息,運用半定性方法,以改善診斷結果[11]。
1.4 失效機理分析
為將故障源的原因節點引入SDG模型,需要進行系統失效分析。系統失效分析往往從系統結構樹底層零部件向上逐層進行,對每一層節點表示的部附件或子系統分析故障模式并對每一故障模式作如下考慮:①故障的“非預期行為”,即說明故障對本節點或同層其他節點的過程變量影響;②對上一層節點的影響,即導致上一層節點表現出的故障模式;③第一類故障原因,由于其子零部件或下一層故障而導致其故障的原因;④第二類故障原因,因為外部環境、條件影響導致其故障的原因。
分析引起系統或部附件發生的故障模式,需要弄清故障源形成的物理與化學過程、電學與機械學過程,綜合考慮包括空間、時間、設備(故障件)的內部和外界多方面因素,如表1所示。

表1 失效分析考慮因素
2 系統的功能結構模型
通過以上討論,對系統結構樹中每一節點進行功能-行為-狀態-故障關系描述,將各節點的分析結果有機地關聯起來,以基于系統結構樹的框架組織形式來存儲、管理,形成系統的功能結構樹。功能結構樹意義在于:①它是有關診斷信息有組織的包容體,反映診斷對象結構、功能和行為關系等診斷相關數據屬性;②它體現復雜系統結構層次關系,從而體現故障傳播的層次性和子父節點間關系的因果性;③當診斷知識發生變化時,由于節點維護規模較小,維護和更新的難度不大,能夠適應知識發生變化;④采用框架形式存儲數據方便以關系數據庫對其中的數據進行結構化的定義和管理,為診斷模型的自動構建提供條件。
系統功能結構樹是一個二元組,記為 H=(N,R),其中,N={N0,N1,…,Nn},表示樹中節點的集合 ;R={〈Ni,Nj〉}={Rij|i ≠j},表示樹中節點聯系的集合。R為節點間的父子關系,反映系統的層級分解關系。
對每個節點N i形式化表示為四元組(CI,P,B,F),CI、P、B、F 均包含相應的屬性,其 BNF(backus-naur form)表示方式如下:

其中,CI為節點識別特征,其余為每一級節點框架結構包含的3個槽。槽P為過程變量集,子框架包括變量閾值和變量類型屬性;槽B為子功能描述集,子框架包含了子功能的行為過程和子功能的生效條件;槽F為節點的典型故障模式,子框架包含了故障模式的故障影響和故障原因。
3 基于功能結構樹的SDG自動建模方法
SDG模型是一種由節點和節點之間有方向的連線構成的網絡圖,能夠表達復雜的因果關系,并且具有包容大規模潛在信息的能力,在描述大型系統時有很多優勢。但目前的SDG建模方法對復雜的大系統而言,均需要手工建立,工作量大,容易出錯且可操作性不強。此外,系統實際運行工況復雜多樣,要求SDG圖結構或參數必須隨實際運行工況動態變化,因此十分需要通過計算機進行自動建模。
3.1 遞階動態SDG模型
與系統的功能結構樹層次相對應,建立遞階層次的SDG模型。對于系統層,只以“超節點”形式表示分系統,而不對分系統內部展開建立系統SDG模型,該模型描述分系統之間的關系。同理建立基于子系統的分系統SDG模型,最后建立基于零部件的子系統SDG圖。由于每個SDG分級模型都針對局部系統建立,節點數目控制在比較合理的范圍內,節點之間的傳播關系容易掌握,同時也解決了診斷分析時圖搜索計算復雜度高的問題。這樣就將對大規模復雜系統SDG模型的管理轉換為對功能結構樹節點的管理,降低了維護的復雜度。
為描述復雜系統過程動態特性,滿足其SDG模型隨著工況變化隨時調整的需求,本文將系統的工作狀態、功能的使能條件引入SDG建模過程。系統功能結構樹中存儲的各子功能的行為過程生效條件和動態閾值,為過程動態SDG的生成提供了支持。
3.2 基于功能結構樹的遞階SDG模型生成方法
系統功能結構樹為系統數據的組織管理提供了一個骨架作用,當用戶將某個節點導航到樹中,并設其對應的結構為需建模的系統或局部系統,可從功能結構樹獲取節點信息生成SDG圖。
3.2.1 構造關聯矩陣
功能結構樹中可能產生聯系的變量包括過程變量和典型故障模式。實際建模中,為減少SDG模型的節點和支路數目,可以只分析過程變量而建立SDG模型,當根據瞬時樣本初步確定故障源且需進一步明確原因時,針對故障源局部子系統引入故障模式作為原因節點建立SDG模型。對需建模的局部系統,基于功能結構樹中其下一級子節點信息構造關聯矩陣。
(1)列出其功能結構樹中下一級子節點所有變量,表示為Di,其中i∈ I,I={1,2,…,n},n為變量個數。則n個變量間的關系可用一個n×n的布爾矩陣表示,記作A。設A=(aij)n×n,初始化所有aij=0。
(2)逐項分析其下一級子節點“子功能”槽中的“行為過程”,根據是否引入原因節點分析“故障模式”槽中的“非預期行為”,獲取可能產生聯系的變量間的影響關系,構造整體關聯矩陣或特定狀態關聯矩陣。①整體關聯矩陣,該矩陣將系統運行過程各個狀態的變量都聯系起來:若i≠j,且D i對D j是正影響關系,則aij=(1)×p,p表示影響比率;若i≠j,且Di對D j是負影響關系,則aij=(-1)×p。②特定狀態關聯矩陣,該矩陣將“子功能”的“生效條件”引入作為使能條件確定特定工況下的變量關系:若i≠j,且Di對D j是正影響關系,則aij=(1)×pU,U表示生效條件成立布爾值;若i≠j,且D i對D j是負影響關系,則aij=(-1)×pU。
3.2.2 由關聯矩陣轉化成SDG模型
上述構造的關聯矩陣表示了系統在運行中的各過程變量及特定類型的故障間影響關系,取值范圍為[-1,1],完全定性分析時,取值{-1,0,1}。而SDG模型的節點表示過程變量,節點間的有向連線表示節點間的因果關系,連線的符號sgn(A-B)代表節點間影響的方向,可看出兩者含義相同。因此,對應于關聯矩陣的每個元素分別表示為SDG一個節點。元素值aij非零代表D i和D j兩個節點之間存在一條有向邊,這條邊從D i指向D j,元素值則表示影響的方向和影響比率。即關聯矩陣中各元素aij取不同值時的含義為

整體關聯矩陣生成的SDG圖是涵蓋了系統所有狀態的整體SDG模型,而特定狀態關聯矩陣對應的SDG圖為整體SDG在一定使能條件下的有向支路,是特定狀態相對獨立的SDG模型。系統運行過程中通過實時判斷工作狀態是否滿足“生效條件”來隨時調整各個狀態下的SDG模型。
4 應用實例
A 320飛機氣源系統是給飛機提供適宜壓力和溫度的空氣的重要系統,該系統涉及的零部件很多,在飛行及地面工作過程中與飛機及動力裝置實時狀態相適應[12],有多個不同工作狀態,是一個多發性故障的復雜系統。根據A 320飛機技術資料作系統工作機理分析,由于目前收集到的航空公司氣源系統歷史故障監測數據不充分,無法建立變量定量影響關系,因此本文將特征參數的因果關系定性地分為正影響和負影響,影響比率為1,建立氣源系統的功能結構樹,如圖1所示。因篇幅有限,不能作全面的分析示例。
以發動機引氣分系統為例說明SDG建模過程。分系統SDG圖應反映子系統之間的關系。將發動機引氣分系統下一級子系統所有過程變量分別排成行和列,其交點是其相互關聯程度,依據各子系統中子功能的“行為過程”確定其具體值。“PRV控制子系統”中“關閉引氣”功能的行為過程“+Ci→-pp0→-pj”表明PRV 閉合指令Ci增強導致PRV上游壓力p p0減小,屬負影響關系,關聯矩陣中對應元素為-1。而pp0減小導致調節壓力p j減小,兩者為正影響關系,對應的關聯矩陣元素為1。將整個飛機過程各個狀態下的所有變量都聯系起來,確定關聯矩陣所有元素,轉化成整體SDG圖,如圖2所示,其中V o是過壓保護閥開度,其他變量含義同結構功能樹。
對于發動機引氣子系統,當發動機完成慢車—大功率爬升—巡航—進近慢車時,都會發生引氣來源之間的相互切換。隨著工作狀況的變化,模型也要隨時進行調整。為得到指定工況的SDG模型,關聯矩陣計算時引入功能“生效條件”,激活總體SDG的有向支路使能條件。如當發動機在爬升及巡航時,中壓級出口壓力p m1能滿足 p m1>248.04kPa(36psi)要求,采用中壓級引氣,SDG模型如圖3所示。而飛機在進近發動機慢車時,p m1太低,引氣從高壓級引出,此時SDG模型如圖4所示。
若診斷過程中已初步確認故障在PRV控制子系統內,可以將故障模式作為特殊變量引入到關聯矩陣計算過程,由此生成的 PRV控制子系統SDG模型中,故障模式作為原因節點,如圖5所示。
可以看出,基于功能結構樹的SDG建模方法能較好地解決復雜系統變工況的SDG自動建模問題,并將系統SDG模型表示為遞階形式。這樣,對于一個具體工作狀態,其SDG模型是整體模型在一定使能條件下的有向支路,同時由于遞階模型的應用,相對于全系統單層模型,在推理時全排列組合搜索計算量大為減小。如發動機引氣分系統整體SDG模型有m(m=14)個子系統,設每個子系統中又含節點數為n個,發動機引氣全系統單層模型進行推理的計算復雜度為O(m2n2)。當明確工況在發動機爬升及巡航時,引氣分系統SDG模型中共有k(k=11)個子系統,使用遞階模型推理其計算復雜度為O(k2+n2),遠小于全系統單層整體模型。
5 結束語
本文提出復雜系統工作機理分析過程并以功能結構樹表示。在此基礎上研究了定性SDG模型的建模步驟,并應用于復雜系統過程動態SDG計算機自動建模,這具有工程應用價值。

圖1 飛機氣源系統系統結構功能樹

圖2 發動機引氣分系統整體SDG模型
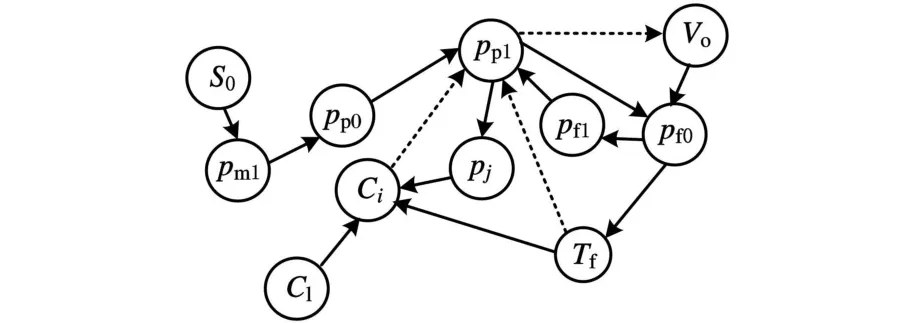
圖3 發動機爬升及巡航時引氣分系統SDG模型

圖4 發動機慢車功率下引氣分系統SDG模型

圖5 含原因節點的SDG模型
[1] Maurya M R,Rengasw amy R,Venkatasubramanian V.A Systematic Framework for the Development and Analysis of Signed Diagraphs for Chem ical Processes 1:Algorithm s and Analysis[J].Industrial&Engineering Chemistry Research,2003,42(20):4789-4810.
[2] Maurya M R,Rengasw amy R,Venkatasubramanian V.A Systematic Framework for the Development and Analysis of Signed Diagraphs for Chem ical Processes 2:Control Loops and Flowsheet Analysis[J].Industrial&Engineering Chem istry Research,2003,42(20):4811-4827.
[3] 杜殿林,張光紅,吳重光.基于知識故障診斷系統所用的深層知識及SDG方法[J].化工自動化及儀表,2005,32(4):8-10.
[4] 李安峰,夏濤,張貝克,等.化工過程SDG建模方法[J].系統仿真學報,2003,15(10):1364-1368.
[5] 楊帆,蕭德云,吳占松.大規模復雜系統的遞階SDG模型描述及故障分析[J].華中科技大學學報(自然科學版),2009,37(增刊I):10-13.
[6] 宋其江,徐敏強,王日新.基于分層有向圖的航天器故障診斷[J].航空學報,2009,30(6):1058-1062.
[7] 韓光臣,孫樹棟,王軍強,等.復雜系統模糊概率故障圖模型研究[J].中國機械工程,2005,16(9):801-804.
[8] 楊帆,蕭德云.SDG建模及其應用的進展[J].控制理論與應用,2005(5):767-774.
[9] 趙有珍,李健,鄧家褆.產品功能結構建模研究[J].計算機應用研究,2003(11):32-38.
[10] 張東民,廖文和,程筱勝,等.復雜機械產品的層級實例庫研究[J].中國機械工程,2009,20(1):48-51.
[11] 王文輝,周東華.基于定性和半定性方法的故障檢測與診斷技術[J].控制理論與應用,2002,19(5):653-666.
[12] 張翅.A 320飛機引氣系統的特點及故障分析[J].航空工程與維修,1999(5):18-20.
Research on SDG M odel Automatic Construction Based on Functional Structure Tree
Zhou Hong Zuo Hongfu
Nanjing University of Aeronautics&Astronautics,Nanjing,210016
To obtain the deep know ledge required for SDG m odeling of a comp lex system,the analysis process of system w orking mechanism was discussed and a concept of FST was presented.FST is a kind of platform for constructing the SDG model,as it organizes diagnostic know ledge such as system function,behavior,failure.The approach of SDG modeling was introduced,w hich w as to construct conjunctionmatrix based on FST,then transform it to graph.Compared w ith SDG structured manually,this approach saves time and efforts.It can be less error-prone and easy tom aintain,It also m eets the requirements of dynamic ad justm ent o f SDG model due to changes in actual working conditions.Finally,the app licability of the approach was demonstrated with a case study of SDG modeling for A 320 aircraft pneumatics system.
functional structure tree(FST);SDG modeling;working mechanism;fau lt diagnosis;conjunction matrix
TP206
1004—132X(2011)05—0566—05
2010—05—19
國家自然科學基金與中國民航聯合資助基金重點項目(60939003)
book=575,ebook=276
(編輯 袁興玲)
周 虹,女,1973年生。南京航空航天大學民航學院博士研究生。主要研究方向為故障診斷與監控。發表論文1篇。左洪福,男,1959年生。南京航空航天大學民航學院教授、博士研究生導師。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
哲學評論(2021年2期)2021-08-22 01:53:34
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中華詩詞(2019年7期)2019-11-25 01:43:04
中國科技論壇(2017年7期)2017-07-25 08:49:53
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
現代企業(2015年9期)2015-02-28 18:56:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39