港口集裝箱堆場內龍門吊的定位和集裝箱管理系統(tǒng)
2011-02-09 01:57:20龔向前王少江
制造業(yè)自動化 2011年5期
關鍵詞:港口
龔向前,侯 力,王少江
(四川大學 制造科學與工程學院, 成都 610065)
0 引言
集裝箱運輸是一種快速、安全、低成本的貨運手段,集裝箱貨運在全球貨運中起著十分重要的作用,國際貨運的90%由集裝箱完成,光2010年1-2月份,全國規(guī)模以上港口完成的國際標準集裝箱吞吐量就達到2096.47萬TEU(20英尺標準貨柜)。射頻識別技術(Radio Frequency Identification)由于其速度快、效率高、可全天候工作、不怕灰塵污染、傳輸距離遠等特點,現在被廣泛應用到集裝箱管理中,極大的提高了港口的管理的水平和效率。借助于RFID技術,每個集裝箱的登入、轉移和登出都可以通過射頻讀卡器獲知,再將讀卡器的獲得的集裝箱標識碼、貨物內容、公司等信息納入港口的管理系統(tǒng)中,便可實現港口集裝箱的自動化管理。然而在集裝箱的轉移、登出階段,港口的吊裝設備龍門吊不可避免的難以快速主動的到達工作位置,需要地面人員的現場管理和指揮,這無疑增加了人工干預的程度,降低了工作效率,影響了港口管理的自動化水平。
為了解決這個問題,我們構想了一個RFID和無線網絡結合的系統(tǒng)[1~3],實現龍門吊的自動定位和路徑規(guī)劃,以完全擺脫地面工作人員的參與,進一步提高港口的自動化管理水品,提升工作效率。
1 系統(tǒng)總體設計
1.1 系統(tǒng)結構框圖
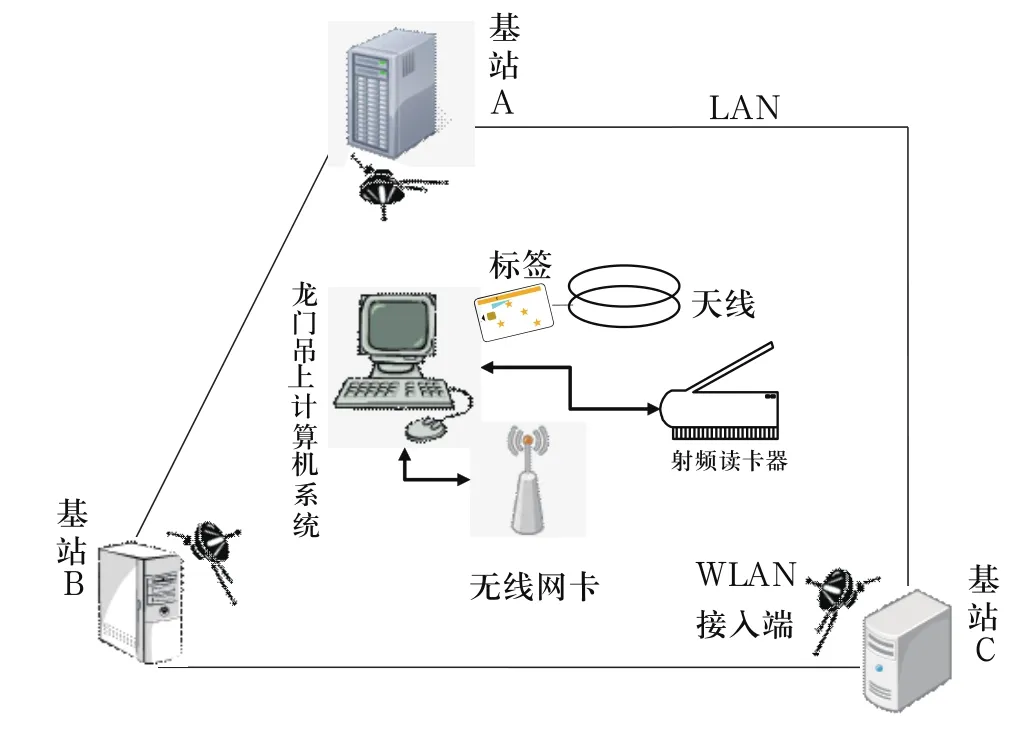
圖1 基于RFID和無線網絡的龍門吊定位系統(tǒng)
1.2 系統(tǒng)工作原理
吊車上讀卡器負責讀取集裝箱標簽信息,并通過無線網絡傳送給各個基站。吊車還貼有標明自身唯一標識等相關信息的標簽,基站通過自身的讀卡器讀取吊車標簽,不僅辨識吊車也以此測定小車與各個基站距離。基站之間也通過對等以太網相互通訊交換測得的距離信息,進而求取吊車的絕對坐標值。同時基站的有關標簽的控制調度命令由基站無線收發(fā)模塊發(fā)出,吊車的無線收發(fā)模塊接收,交由吊車讀卡器執(zhí)行。系統(tǒng)的基本工作流程是:讀寫器通過發(fā)射天線發(fā)送出一定頻率的射頻信號,當附著標簽的目標對象進入發(fā)射天線工作區(qū)域時會產生感應電流,電子標簽憑借感應電流所獲得的能量發(fā)送出存儲在芯片中的產品信息,或者主動發(fā)送某一頻率的信號;讀寫器對接收天線接收到電子標簽發(fā)送來的載波信號進行解調和解碼后,送到數據管理系統(tǒng)進行相關的處理;數據管理系統(tǒng)根據邏輯運算判斷該電子標簽的合法性,針對不同的設置做出相應的處理和控制。
2 龍門吊定位原理
2.1 吊車與基站間距離的獲取
RSSI定位算法,RF信號在某個位置的強度可以采用接收信號強度指示(RSSI)來標示。一般來說,相同設備發(fā)出的信號的強度都是一個定值,但是當RF接收和發(fā)送設備的距離不一樣時,接收設備接收到的發(fā)送回來的信號強度也就不一樣。這種強度的衰減,稱為信號的傳播損耗,它與環(huán)境有關。
無線電傳播路徑損耗對于RSSI定位算法的定位精度有很大影響。常用的傳播路徑損耗模型有:自由空間傳播模型(Free space propagation model);對數距離路徑損耗模型(Log- distance path loss model);哈它模型 (Hata model);對數—常態(tài)分布模型(Log- distance distribution)等。
自由空間無線電傳播路徑損耗模型如下:

其中,d是RF接收和發(fā)射設備之間的距離,單位km;f是頻率,單位為MHz;n是路徑損耗指數,表明路徑損耗隨距離增長的速度。
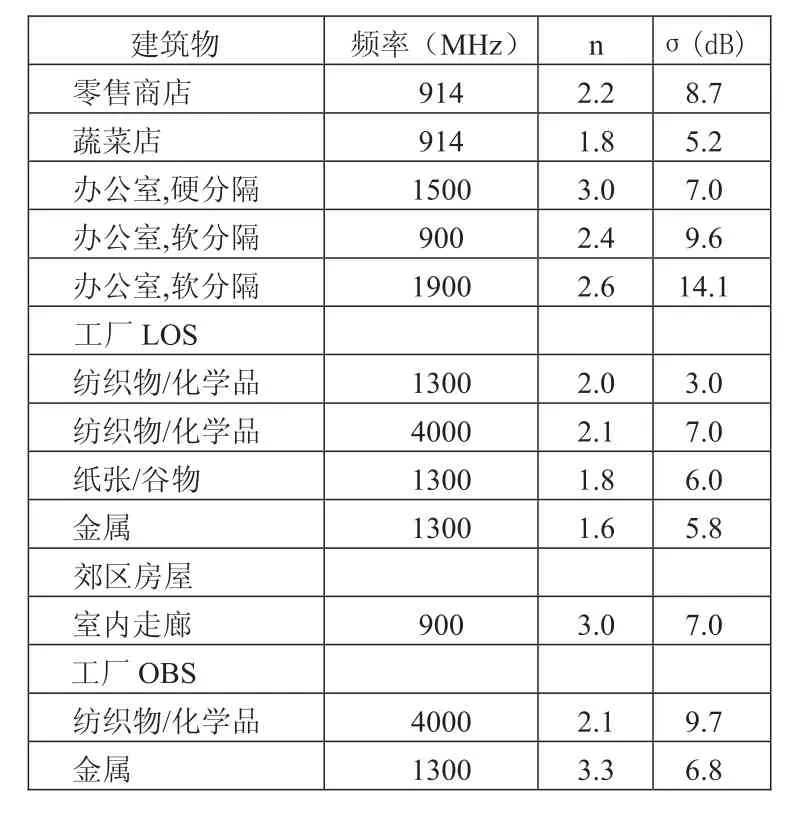
表1 不同建筑物的路徑損耗指數和標準偏差
自由空間是一種理想空間,具有以下特點:均勻無損耗的無限大空間,電磁波在自由空間傳播時,不存在反射、繞射、散射和吸收率等現象。電磁波在自由空間傳播發(fā)生的能量損耗,是由于輻射能量的四周擴散。在實際應用環(huán)境中,由于多徑、繞射、障礙物等因素,無線電傳播路徑損耗與上述理想情況下的值相比有些變化。理論和實測的結果表明,無論室內或室外,平均路徑損耗隨距離按對數規(guī)律衰減[4,5],可表示為:

其中,d0為近地參考距離;d是RF接收和發(fā)射設備之間的距離,單位km;n是路徑損耗指數。由于多種因素的影響,路徑損耗在各方向上存在不一致,故此式中的橫杠表示對于給定值d的所用可能路徑損耗的綜合平均。
實際接收設備所處地點的電波傳播條件千差萬別,如果我們在距離發(fā)射天線dKM的多個位置上進行大量測試的話,測量所得的路徑損耗必定會呈現出隨機分布的特點,這種隨機效應是由于建筑物等遮擋造成的。式2只考慮在相同的發(fā)送接收設備條件下,大尺度平均路徑損耗,然而不同位置的周圍環(huán)境,對路徑損耗的影響非常大。故引入對數—常態(tài)分布模型計算路徑損耗。對任意的d值,特定位置的路徑損耗為PL(d),如下式:

其中PL(d)[dB]是經過距離d后的路徑損耗,Xσ~N(0,σ2)是加在平均路徑損耗上的平均值為0的正態(tài)分布隨機變量,稱為路徑損耗的校正因子。因此PL(d)是以
對數—常態(tài)分布模型使用近地參考距離d0作為路徑損耗的參考點。當d>d0時,路徑損耗與d0處的路徑損耗相關,d0處的路徑損耗可由測量平均值或自由空間公式預測得到。參考距離d0的典型取值1m(室內環(huán)境)和100m或1Km(室外環(huán)境)。這里取d=d0=l00m,代入式(1),可得到Loss,即的值。
各基站接收到小車上RF信號時的信號強度為:

根據各基站接收到的小車信號的強度,加上已知的小車上RF信號的發(fā)射功率和天線增益(包括發(fā)射天線增益GT和接收天線增益GR),利用對數—常態(tài)分布模型式(3),可以將傳輸損耗轉化為距離。
截至2017年底,31個省(區(qū)、市)均開展了承包地確權工作。中國社會科學院農村發(fā)展研究所研究員李國祥表示,土地確權將進一步明晰農村土地產權,更好地保護農民利益,促進農村土地要素市場發(fā)育和優(yōu)化配置。隨著土地確權工作的完成,下一步應當做好土地流轉市場服務工作,讓農村土地確權證在實際工作中發(fā)揮作用。同時,土地確權工作中的相關經驗也可以在后續(xù)農村土地征收、集體經營性建設用地入市以及農村宅基地改革“三塊地”改革中推廣。
式(3)中還有兩個需要確定的常量:n表示路徑長度和路徑損耗之間的比例因子,依賴于障礙物的結構和使用的材料,它的范圍在2至5之間,自由空間時n=2:Xσ; 是平均值為0的正態(tài)分布隨機變量,也就是信號穿過障礙物的衰減,其標準差范圍隨環(huán)境有較大變化。本系統(tǒng)的RF系統(tǒng)應用在某港口集裝箱碼頭,在此港口的無線電傳輸的環(huán)境有如下特征:港口的氣候條件一般是海洋性氣候與陸地氣候結合;港口的堆場集裝箱的高度一般為6~8個集裝箱即20m~25m左右,而且堆放密集;港口地貌一般比較平坦,不存在太大落差;港口機械的移動頻繁;港口面積較大,超過百萬平方米。綜合上述環(huán)境因素,可以取路徑損耗指數n≈2.5,同時取路徑損耗的校正因子Xσ≈﹣20dB。或者根據現場實地測量決定這兩個常量的參考值。
顯然接收設備到信號源的距離越近,由RSSI值的偏差產生的絕對距離誤差越小,而當距離較大時,由于上述式(3)中Xσ的影響,由RSSI波動造成的絕對距離誤差將會很大。但鑒于堆場內各集裝箱的唯一識別號碼及所堆放位置已被準確獲知,便可以采用就近的發(fā)送設備(如集裝箱RFID標簽)對由上述方法測算出的小車與基站距離值作適當修正,以提高定位精度。
2.2 龍門吊坐標的計算

圖2 定位方法示意圖
在射頻定位系統(tǒng)中,為了消除不同基站對定位結果的誤差,一般采用相對定位的方式。即選擇其中一個基站作為服務基站,然后考察待定位小車到不同基站之間的距離差。由圖2可知,一旦獲得待定位小車到兩個基站之間距離的測量值,就可以得到待定位小車到兩個基站之間的距離差,多個基站到待定位小車距離測量值就可以構成一組關于待定位小車位置的雙曲線方程組,求解該方程組就可得到待定位小車的估計位置。
設(x,y)為待定位吊車的待估計位置,(Xi,Yi)為第i個基站的己知位置,根據幾何知識,待定位吊車和第i個基站之間的距離Ri為:

令Ri-1表示待定位吊車到基站i的距離與到基站1的距離差,則

為求解該非線性方程組,可以先進行線性化處理。經過適當的數學變換,可得:

將x,y,R1視為未知數,上式變成線性方程組,求解該方程組就可以得到待定位吊車的位置。本文只利用3基站的3個接收設備對待定位吊車進行二維位置定位,故上述三式中i=1,2,3。此算法過程簡單明確,能獲得基于距離差測量數據的最優(yōu)解。
3 管理系統(tǒng)架構與運行
定位功能是集裝箱管理系統(tǒng)功能的一部分,它總體包含以下的子系統(tǒng)。
3.1 倉儲物資自動化管理系統(tǒng)
集裝箱RFID自動識別系統(tǒng)完成裝箱數據輸入、集裝箱信息實時采集和自動識別;通信系統(tǒng)完成數據無線傳輸;集裝箱信息管理系統(tǒng)完成對集裝箱信息的實時處理和管理,并完成數據統(tǒng)計與分析,向客戶提供集裝箱信息查詢服務;港口集裝箱管理系統(tǒng)監(jiān)測、記錄經過道口的集裝箱、拖運車輛、事件發(fā)生時間、操作人員、集裝箱堆放位置等信息,具有制作二維集裝箱堆場貝位圖和放箱、找箱功能。倉儲管理尤其是大型倉儲管理工作是非常繁雜的,出、入庫登記、庫存盤點等需要耗費人力和時間成本。RFID技術在倉儲管理中的應用,大大提高了管理效率,降低了管理成本。由于RFID技術的無接觸和可同時批量標簽識別的優(yōu)勢,使物品在通過倉庫識別區(qū)后,出(入)庫和庫存登記自動生成。若配合移動機構裝置,可按預先設置的盤存時間完成庫存盤點。同時對未授權出庫的物品報警。
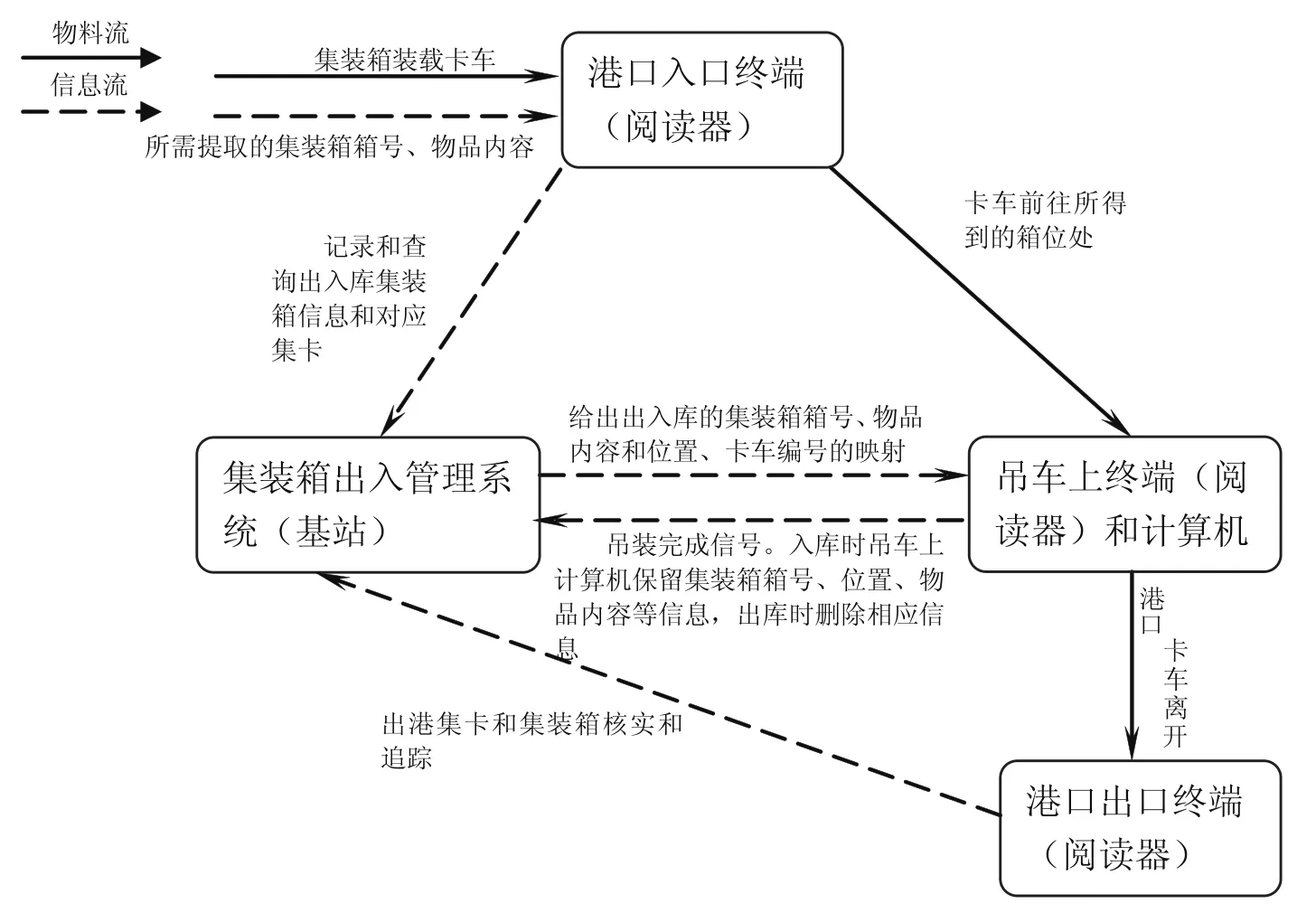
圖3 港口集裝箱管理系統(tǒng)信息與物料流
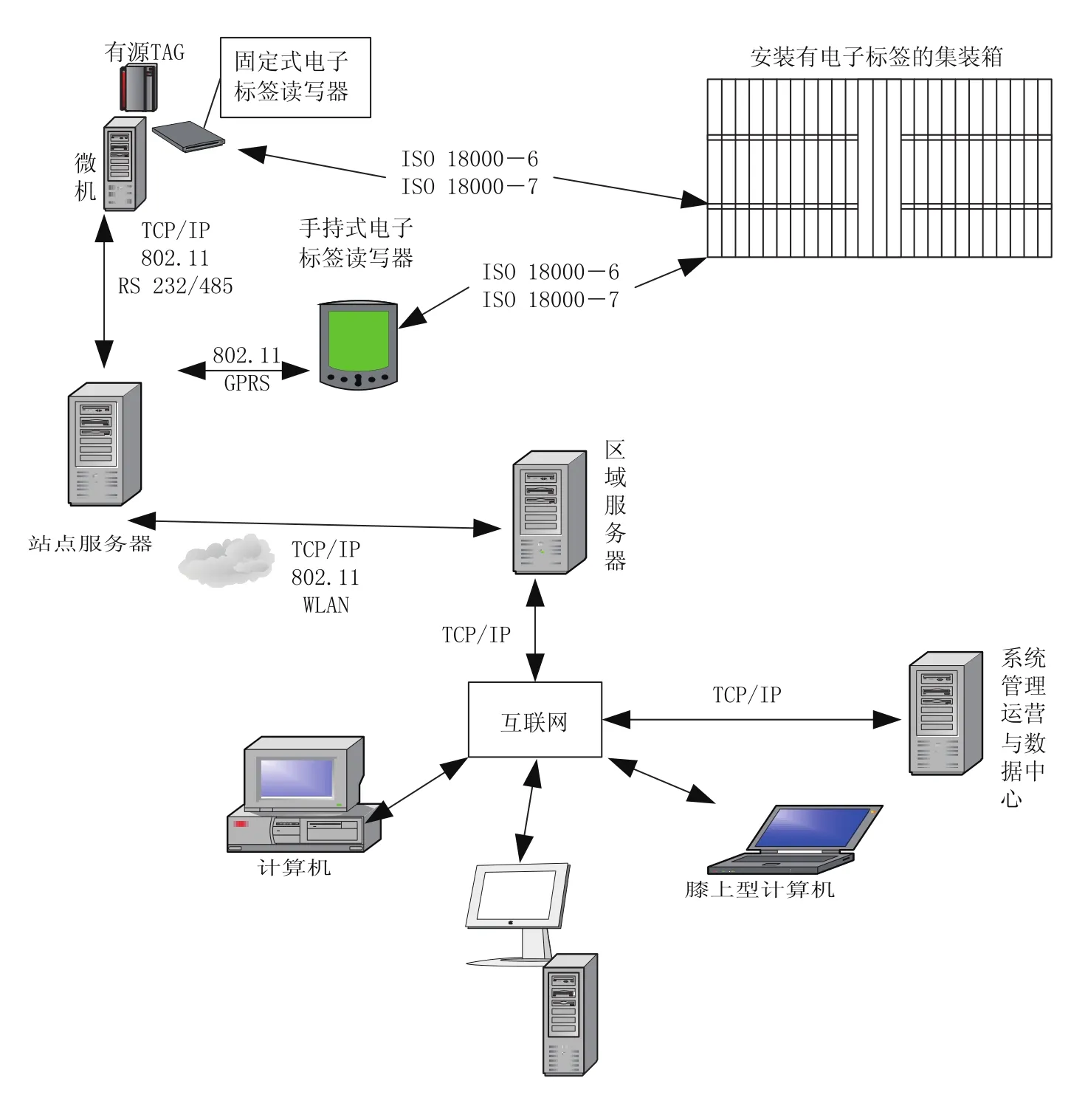
圖4 物流跟蹤系統(tǒng)網絡結構
3.2 物流跟蹤系統(tǒng)
許多單位需要對物品(商品)的流動進行跟蹤,了解物品(商品)發(fā)出、中轉、到達的時間,以及到達的目的地。以便掌握庫存數量、生產資料的儲備、對錯發(fā)物品(商品)的調整。RFID識別技術結合局域或廣域網絡的應用,可輕松達到目的。物流跟蹤系統(tǒng)的另一個重要應用是對重要或危險物品的流動跟蹤。因為許多重要或危險物品是要嚴格按指定的點對點流動,同時對流動的時間亦有嚴格要求。比如:有保密等級要求的物品、貴重物品、金融、軍火、爆炸、放射、易污染物品、控制藥品、疫苗、醫(yī)用垃圾等。通過系統(tǒng)跟蹤,可掌握物品的流向、流量、流動時長。
3.3 無線定位吊車并實現自動化裝卸載
利用RFID實現集裝箱的無線定位,并控制吊車按照指令對指定的集裝箱進行裝卸載。可以基站一、二、三為基點,建立坐標系,從而確定各個集裝箱的準確位置,生成含有集裝箱位置、進場日期、物品名稱、數量等數據的數據庫,儲存在倉庫(集裝箱)管理系統(tǒng)中,從而可認定各在庫集裝箱的位置為已知的。
當需要用吊車運輸集裝箱時,基站向附近吊車廣播發(fā)送吊裝需求信號,收到信號的空閑吊車通過裝在吊車上的有源TAG向三個基站發(fā)出應答信號,基站接收并計算得出吊車此時的位置,通過WLAN返回吊車上的計算機。再由計算機選擇合適吊車和路線(吊車到指定集裝箱的優(yōu)化路線),發(fā)出指令,從而驅動吊車按照優(yōu)化路線向集裝箱移動。當吊車移動至指定位置時,吊車上的讀卡器發(fā)出信號,激活集裝箱上的TAG,并讀取TAG上的信息以確定是否正確,如正確,可立即裝載。
4 結束語
集裝箱港口作為一個物流系統(tǒng),物品的尺寸統(tǒng)一、規(guī)范,管理便利,只要適當減少和改善其中人工干預環(huán)節(jié)即可實現集裝箱從入港到出港的全程自動化。其中人工介入最多的是集裝箱位置的查詢、定位和龍門吊的吊裝調度,此系統(tǒng)采用RFID和WLAN實現了龍門吊的定位和吊裝調度的自動化,為港口的自全程動化和效率的提高提供了有利保障。
[1] 李斌,李文鋒.智能物流中面向RFID的信息融合研究[J].電子科技大學學報,2007,36(6):1329-1332、1349.
[2] 王成,王志新,張華強.風電場遠程監(jiān)控系統(tǒng)及無線網絡技術應用研究[J].自動化儀表,2008,29(11):16-20.
[3] 朱勝利,佟麗華,蔡曉蕾,等.北京地鐵5 號線乘客信息系統(tǒng)網絡平臺關鍵技術研究[J].鐵路計算機應用,2008,17(7):42-45
[4] 謝處方,饒克謹.電磁場與電磁波[M].北京:高等教育出版社,1991:157-162.
[5] 楊大成,等,移動傳播環(huán)境理論基礎、分析方法和建模技術[M].北京:機械工業(yè)出版社,2003:63-69.
猜你喜歡
環(huán)球時報(2023-01-29)2023-01-29 15:13:42
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:36
金橋(2022年10期)2022-10-11 03:29:22
機電設備(2022年2期)2022-06-15 03:20:38
青年文學家(2022年2期)2022-03-17 21:57:14
閱讀與作文(小學高年級版)(2020年4期)2020-05-26 14:15:02
當代工人(2019年20期)2019-12-13 08:26:11
數學大王·趣味邏輯(2019年2期)2019-01-23 10:49:26
水上消防(2018年4期)2018-09-18 01:49:38
