噴嘴性能試驗器壓力模糊控制系統設計
2011-02-19 07:50:58黃曉峰
制造業自動化 2011年3期
黃曉峰
HUANG Xiao-feng
(湖南工業大學 電氣與信息工程學院,株洲 412008)
0 引言
噴嘴是航空發動機的關鍵部件,噴霧錐角與不均勻度是噴嘴的兩個重要指標,直接影響燃燒。噴嘴工作壓力是噴嘴性能試驗器的關鍵參數,對霧化角與不均勻度有重要影響。根據南方航空噴嘴性能檢測工藝要求,檢測時工作壓力要求2.3±0.01MPa,霧化角85o±5o,霧化不均勻度≤25%。試驗器壓力控制是否精確,直接決定噴嘴測試是否合格。本文基于模糊PID控制,開發出噴嘴性能綜合測試設備,實現噴嘴綜合性能的智能檢測。
1 系統結構
液壓系統設計由齒輪泵、比例溢流閥、流量變送器、壓力變送器、流量分布盤和量杯組等組成。計算機控制系統設計由工控機與PLC組成。圖像采集處理系統設計由CCD彩色攝像機、圖像采集卡與工控機組成。
2 壓力模糊PID控制原理
壓力變送器把噴嘴工作壓力,轉換為4~20mA信號,通過FX2N-4AD轉換成12位數字信號,經可編程控制器FX2N的通訊模塊FX2N-485傳給計算機,計算控制量的大小,通過FX2N-2DA輸出,并由電液比例控制器(VT-2000BS40G)放大,轉換成100~800mA電流信號,控制比例溢流閥電磁鐵磁力大小,調節比例溢流閥(DBE10-30/5Y/2)閥芯的開度,得到穩定的壓力。電液比例溢流閥壓力控制系統是非線性環節,存在死區、滯環和溫漂,難建立準確數學模型。
2.1 模糊PID控制原理
數學模型:

傳統PID控制效果較好,但也存在不足。
1)PID控制器的參數必須相對于某一特定系統(模型已知、系統參數已知)進行整定;
2)PID控制器參數一旦整定完畢,便只能固定地適應于一種工況[1]。大多數生產過程都具有非線性,特征隨時間的變化而變化,當過程特性和環境發生變化時,需要控制器做相應的調整,以保證控制質量,但傳統PID控制沒有這種“自適應”能力,而需要重新整定參數。
2.2 模糊控制
模糊控制器是一種語言控制器,包括:模糊化、模糊規則庫、模糊推理和模糊決策。Mamdani二維模糊控制器規則[7]:
其中Ai、Bj是輸入量E、EC在論域上的模糊子集;Cij~為輸出量U在論域上的模糊子集。
由模糊規則確定的模糊關系為

其中R的隸屬函數為

當E、EC取模糊集A、B時,輸出的控制量變化U由模糊推理合成規則可得

2.3 模糊PID控制
模糊控制相當于PID控制器的作用,動態特性良好,但無法消除靜態誤差。為提高控制精度,需引入積分功能。1987年,Ying首次將模糊控制通過解析方法與傳統控制器聯系起來,并且證明了Mamdani模糊控制器是具有變增益的非線性PID控制器[2]。
模糊PID控制器分為直接控制型、增益調整型和混合型控制器[3]。本試驗器采用誤差驅動增益調整型模糊PID控制器,通過專家知識確定控制器的PID增益參數?KP、?KI、?KD與誤差e和誤差變化?e之間的模糊關系,在運行中不斷檢測e和?e,通過模糊推理對PID的三個參數進行在線修改,滿足不同e和?e對控制參數的不同要求,使被控對象具有良好的動態和靜態性能。它是誤差e和誤差變化?e的非線性函數,它的規則形式如下[4]:
3 模糊PID控制器設計
壓力模糊PID控制器分為常規PID控制部分和模糊推理的參數校正部分,模糊推理選擇雙輸入三輸出模糊控制器,采用Mamdani模糊控制算法,加權平均法模糊判決。輸入量為e和ec,輸出量是PID 增益參數?KP、?KI、?KD。由模糊推理在線修正PID參數。

其中K'P、K'I、K'D是系統原先整定好的PID參數,?KP、?KI、?KD是模糊控制器的輸出。
模糊PID控制系統結構如圖1所示。

圖1 模糊PID控制系統原理圖
輸入e和ec的論域為{-3,-2,-1,0,1,2,3},輸出?KP、?KI、?KD的論域為{-3,-2,-1,0,1,2,3}。
將輸入、輸出變量都劃分為7個等級,對應語言值的模糊子集為{NB,NM,NS,ZO,PS,PM,PB},分別代表“負大,負中,負小,零,正小,正中,正大”。
為提高系統壓力的精度,對輸入、輸出變量都采用三角形隸屬度函數。
3.1 模糊控制規則
模糊控制器的核心是模糊控制規則,PID控制中,KP、KI、KD具有以下特點[5]:
1)KP增大,可以加快響應速度,減小系統穩態誤差,提高控制精度,但過大會使系統產生超調,甚至導致不穩定。
2)積分作用主要是消除系統靜態誤差。積分增益增大,有利于減小系統靜差,但是KI過大,會加大超調,甚至引起振蕩。
3)微分作用可以改善動態性能。增大微分增益KD,有利于加快系統響應,使系統超調量減小,穩定性增加,但對擾動敏感,抑制外部干擾能力減弱;若KD過大,會使調節過程出現超調減速,調節時間增長;反之,若KD過小,系統響應變慢,穩定性變差。
針對不同的e和ec,劉金琨總結出了一套KP、KI、KD參數的整定原則[6]:
1)當e較大時,為使系統具有較好的跟蹤性能,應取較大的KP與較小的KD,同時為了避免系統響應出現較大的超調,應對積分作用加以限制,通常取K=0。
2)當e和ec中等大小時,為使系統具有較小的超調,KP應取得小些。在這種情況下,KD的取值對系統的影響較大,應取得小一些,KI的取值要適當。
3)當e較小時,為使系統具有較好的穩定性能,KP與KI均應取得大些,同時為避免系統在設定值附近出現振蕩,并考慮系統抗干擾性能,當較大時KD可取得小些;ec較小時KD可取大一些。
根據以上規則建立模糊控制規則表[6]。
3.2 系統仿真
利用模糊邏輯工具箱設計試驗器壓力模糊PID控制模型,建立模糊PID控制子系統。如圖2所示。比例溢流閥控制模型近似比例環節和二階振蕩環節的組合[7],用二階系統代替其模型進行仿真研究。
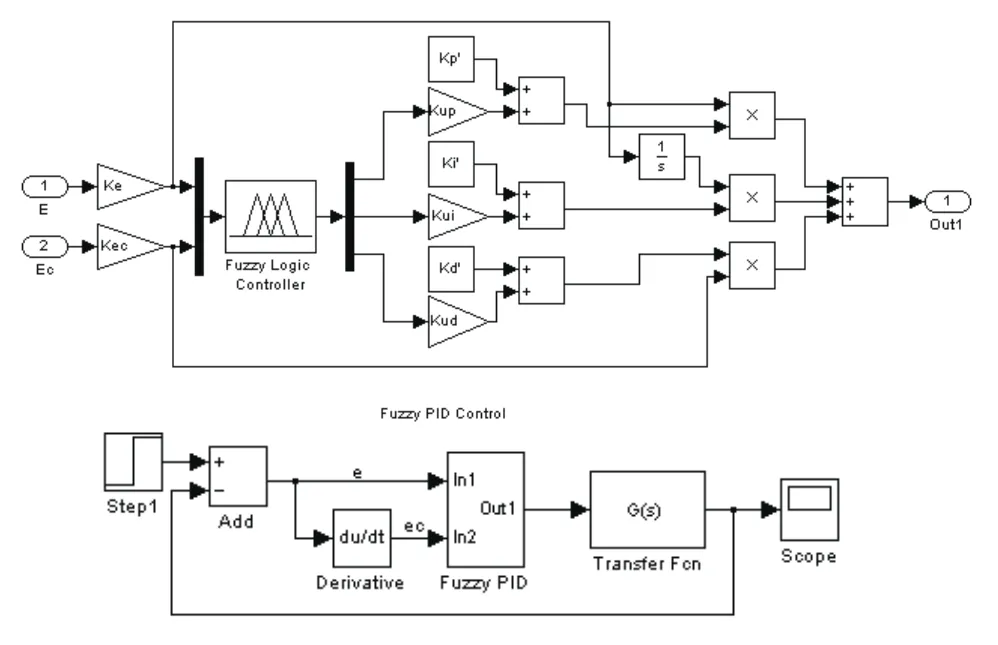
圖2 壓力模糊 控制系統結構框圖
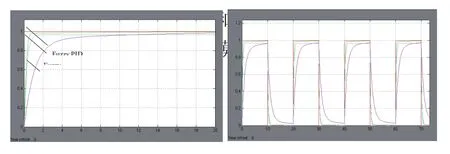
圖3 單位階躍響應與單位方波信號響應
仿真結論:對于單位階躍信號,PID控制的動態響應速度特性較差,系統的調節時間長。普通模糊控制較好地克服了PID控制響應速度較慢的缺點,但系統出現靜態誤差,如不加入積分環節,難以完全消除誤差,控制精度不高。而模糊PID控制較好地結合了模糊控制和PID控制的優點,既能達到較快的響應速度,超調量較小,又能保證系統的穩態精度。方波信號響應中,模糊PID控制對于方波的跟蹤效果最好,控制性能優于PID控制和模糊控制。
3.3 實際運行結果
試驗器現場采用PID與模糊PID控制,對控制效果進行比較,模糊PID控制適應性強,受到外界干擾時能迅速的恢復穩態,控制效果優于PID控制器。采用模糊PID控制的壓力穩定在2.3±0.01MPa。現場采集的壓力實時運行曲線對比如圖4所示。實際運行如圖5所示。
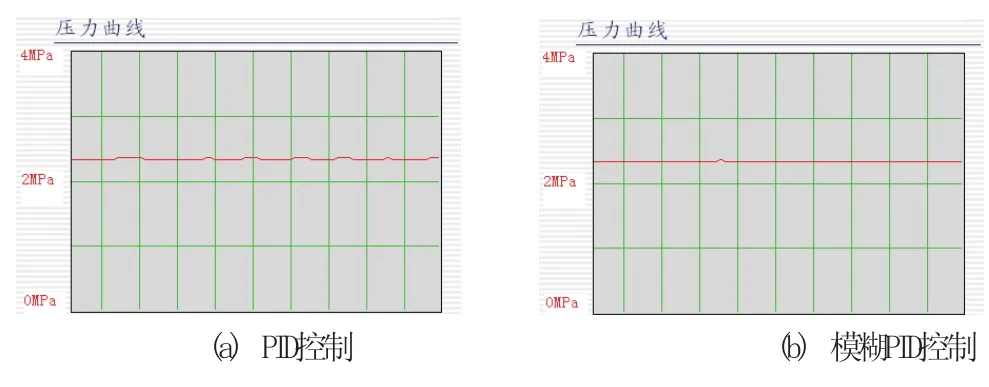
圖4 現場實時壓力運行曲線
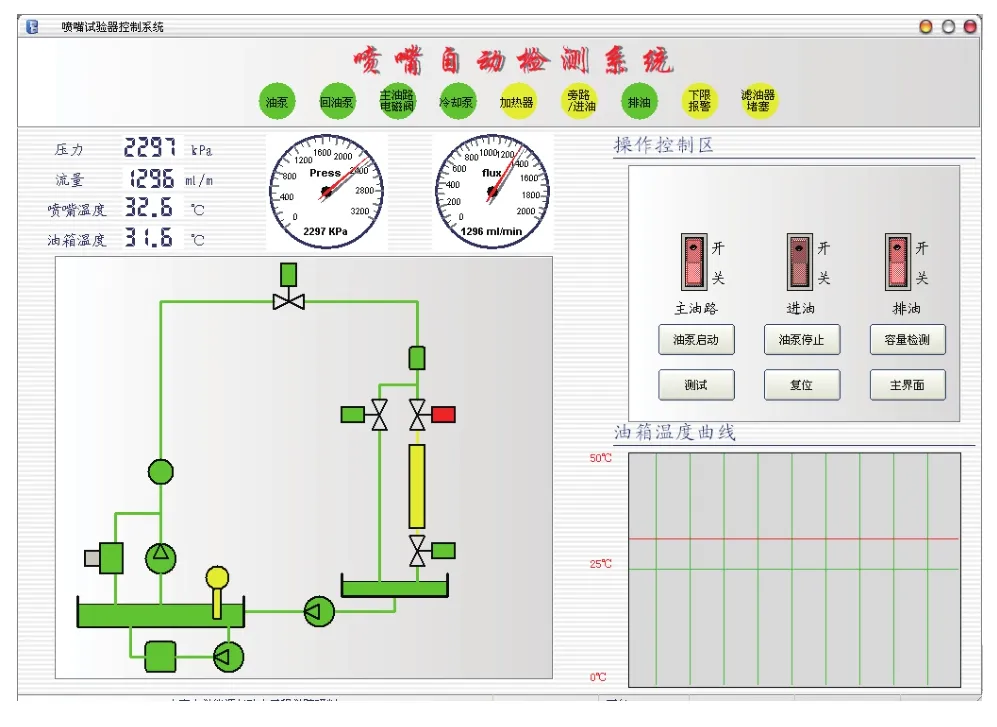
圖5 程序實際運行界面
4 結論
基于模糊PID的噴嘴綜合性能試驗器壓力控制方案,結合PID控制與模糊控制的優點,通過仿真分析與實際運行,模糊PID控制較好地結合了模糊控制和PID控制的優點,響應速度較快,超調量較小,又能保證系統的穩態精度。經長期實際運行,模糊PID控制明顯優于PID控制。
[1]薛潔.模糊自調整二自由度PID控制器及在磨礦分級中的應用[D].昆明:昆明理工大學,2002.
[2]K.S.ang,Kim Fung.An Optimal Fuzzy PID Controller[J].Transactions on Industrial,2001,48:757-765.
[3]K.A.Gopala Rao,B.Amarendra Reddy,P.Durga Bhavani.Fuzzy Pi and Integrating Type Fuzzy Pid Contronllers of Linear,Nonlinear and Time-Delay Systems[J].International Journal of Computer Applications,2010.1:43-49.
[4]胡包鋼,應浩.模糊PID控制技術研究發展回顧及其面臨的若干重要問題[J].自動化學報,2001,27(4):567-584.
[5]李卓,蕭德云,何世忠.基于Fuzzy推理的自調整PID控制器[J].控制理論與應用,1997,14(2):238-243.
[6]劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003:10-165.
[7]王傳禮,丁凡,殷建立等.卷染機電液控制系統的動態特性研究[J].浙江大學學報,2004,38(5):631-635.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
