裝備快速封存技術(shù)中的傳感器配置研究
2011-02-23 07:02:02鄭曉曦張雨張磊羅劍
裝備環(huán)境工程 2011年3期
關(guān)鍵詞:模型
鄭曉曦,張雨,張磊,羅劍
(裝甲兵工程學(xué)院,北京 100072)
裝備在長期封存過程中,由于受到周圍介質(zhì)(如大氣、海水或微生物)的作用,會產(chǎn)生腐蝕和霉變,因而在監(jiān)測封存環(huán)境狀態(tài)的過程中,最重要的物理量是封存裝備空間的溫度和濕度[1]。封存空間和外界環(huán)境沒有絕對隔離,在穩(wěn)態(tài)情況下密封體與外界環(huán)境也存在透濕現(xiàn)象,甚至?xí)霈F(xiàn)結(jié)露問題,在動態(tài)除濕過程中溫濕度場的分布更加復(fù)雜[2]。首先,由于封存裝備空間較大,自身存在較大的溫濕度梯度,特別是在進(jìn)行動態(tài)除濕的過程中溫濕度場的情況復(fù)雜,這就意味著不能隨意選擇傳感器布點(diǎn)位置。其次,由于裝備長期封存有特殊要求,所以封存過程中對封裝環(huán)境狀態(tài)監(jiān)測技術(shù)也有特殊要求。
因而,傳感器最優(yōu)配置(數(shù)目與布點(diǎn)位置)的合理與否將直接影響封裝裝備的狀態(tài)監(jiān)測以及動態(tài)除濕的效果。
1 配置原則
1.1 放置位置的原則
1)確保監(jiān)測數(shù)據(jù)的可信度。在對封存裝備進(jìn)行動態(tài)除濕過程中,封存裝備內(nèi)部存在較大的濕度梯度場,封裝裝備內(nèi)部空間溫度、濕度分布不均勻,動態(tài)除濕的過程中內(nèi)部溫度、濕度的分布情況更為復(fù)雜。因此,在選取傳感器布點(diǎn)位置時(shí),要充分考慮該點(diǎn)溫濕度數(shù)據(jù)的代表性,使測量數(shù)據(jù)能很好地反應(yīng)封裝環(huán)境的真實(shí)狀態(tài),以便能夠準(zhǔn)確地測量和精確地控制。
2)所選的監(jiān)測位置要便于安裝傳感器。裝甲裝備內(nèi)部空間結(jié)構(gòu)復(fù)雜,要考慮到選點(diǎn)位置是否便于安裝溫濕度傳感器。
3)所選傳感器監(jiān)測點(diǎn)使整個封裝空間沒有監(jiān)測盲區(qū)。傳感器的有效感應(yīng)范圍有限,封裝裝甲裝備內(nèi)部空間較大,要充分考慮到監(jiān)測盲區(qū)。
1.2 配置傳感器質(zhì)量的原則
1)能夠?qū)崿F(xiàn)系統(tǒng)自我糾錯功能。傳感器一旦布置在封存裝備內(nèi)部進(jìn)行使用,就不能再進(jìn)行更換,這也是裝甲裝備快速封存技術(shù)的一項(xiàng)特殊要求。在封裝裝備狀態(tài)監(jiān)測過程中,傳感器使用的環(huán)境比較惡劣,因而傳感器自身的使用可靠性不容忽視。為使監(jiān)測系統(tǒng)能夠有效、可靠地工作,整個監(jiān)測系統(tǒng)應(yīng)具有自我糾錯功能。
2)確保狀態(tài)監(jiān)測的精度。通過各監(jiān)測點(diǎn)的數(shù)據(jù)比對,可提供精確的溫濕度數(shù)據(jù),對模型的精度可達(dá)到最大,而對其他誤差估計(jì)可達(dá)到最小。
1.3 配置傳感器數(shù)目的原則
盡量降低成本與能耗,主要是指節(jié)約系統(tǒng)費(fèi)用和降低能耗,包括在沒有監(jiān)測盲區(qū)的前提下盡量減少傳感器的用量和降低運(yùn)行過程中的電量消耗。因?yàn)榉庋b環(huán)境中監(jiān)測設(shè)備在很長時(shí)間內(nèi)不能進(jìn)行電池更換,所以要盡可能降低系統(tǒng)的電量消耗,這就要求對于傳感器的數(shù)目要有所限制。
2 放置位置的確定
CFD 技術(shù)在計(jì)算室內(nèi)流場、溫度場等方面被證明是一種有效的技術(shù)[3]。首先,利用CFD技術(shù)對某型封裝裝備動態(tài)除濕過程中的內(nèi)部空間溫濕度場進(jìn)行仿真分析,得到整個過程中封存空間的溫度、濕度分布情況,經(jīng)過數(shù)據(jù)分析得到封存空間內(nèi)部溫度值和濕度值的危險(xiǎn)位置,并結(jié)合上文中提到的位置確定原則,確定傳感器的布置位置。
2.1 封存裝備溫濕度場仿真物理模型
依據(jù)某型實(shí)際裝備內(nèi)部構(gòu)造尺寸建立了三維模型,并結(jié)合CFD技術(shù)進(jìn)行仿真條件限定,對所建立的三維模型進(jìn)行了相應(yīng)的簡化。將簡化后的模型導(dǎo)入面向CFD 的專業(yè)前處理器軟件(GAMBIT)中,利用GAMBIT 對封裝裝備仿真的物理模型進(jìn)行相應(yīng)的設(shè)定以及網(wǎng)格劃分[4],計(jì)算模型網(wǎng)格劃分后如圖1所示。
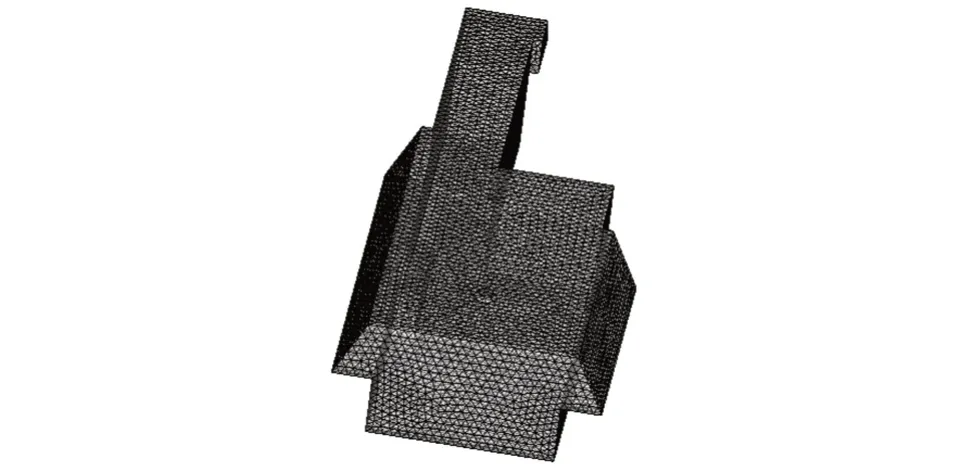
圖1 裝備內(nèi)部空間計(jì)算模型Fig.1 Equipment interior space calculation model
2.2 CFD仿真數(shù)學(xué)模型
CFD 技術(shù)通過求解普遍遵守的質(zhì)量守恒、動量守恒、能量守恒方程,獲得計(jì)算區(qū)域的各種參數(shù)。仿真過程中選用標(biāo)準(zhǔn)的k-ε湍流模型。考慮到水分子在擴(kuò)散過程中伴隨著熱量的交換,為了減少溫濕度和氣流計(jì)算結(jié)果的誤差影響,依據(jù)CFD 技術(shù)的基礎(chǔ)知識和數(shù)值傳熱學(xué)理論[4—5],得出關(guān)于封存裝備空間流體各變量,有以下微分控制方程組。
連續(xù)性方程:

動量方程:

式中:Ui,Uj為各速度分量;ρ為氣體密度;P 為壓力;μ為氣體的動力黏度。
標(biāo)準(zhǔn)k-ε模型的湍動能k 和耗散率ε方程如下:
式中:μt為湍流黏性系數(shù)為由于平均速度梯度引起的湍動能;Gb為由于浮力影響引起的湍動能;YM為可壓縮湍流膨脹對總的耗散率的影響;Cμ=0.09;在fluent(商用CFD軟件包)中,G1ε,C2ε,C3ε,σk,σε為默認(rèn)值常數(shù),分別為1.44,1.92,0.09,1.0,1.3。
水汽的質(zhì)量濃度計(jì)算公式:
式中:C為水汽的質(zhì)量濃度;Γc為水汽的擴(kuò)散系數(shù),不考慮隨氣體溫度的變化時(shí)Γc=3.185×10-5m2/s。
2.3 CFD數(shù)值仿真的假設(shè)條件
在對封裝裝備穩(wěn)態(tài)情況下溫濕度分布情況進(jìn)行仿真分析時(shí),設(shè)定CFD數(shù)值仿真的假設(shè)條件。
1)送風(fēng)為來流速度、溫度恒定的穩(wěn)態(tài)紊流干空氣,內(nèi)部氣體為不可壓縮流體,且滿足Boussinesq 假設(shè),認(rèn)為流體密度的變化僅對浮力產(chǎn)生影響,出風(fēng)口壓強(qiáng)與裝備內(nèi)部相同。
2)計(jì)算流體為干空氣和水蒸氣的理想氣體混合物,液態(tài)水滴中不包含溶解的空氣。空氣的存在不影響水蒸氣及其凝聚相平衡,平衡濕度和分壓力對應(yīng)飽和溫度計(jì)算。
3)計(jì)算過程中不考慮裝備內(nèi)的輻射傳熱。
4)流場具有高的紊流雷諾系數(shù),流體的紊流黏性具有各向同性。
5)氣流為低速流動,可忽略由流體黏性力做功所引起的耗散熱。
6)不考慮漏風(fēng)的影響,認(rèn)為內(nèi)部氣密性良好。
2.4 濕度分布的仿真結(jié)果
通過對封裝裝備整個除濕過程的動態(tài)仿真,得知在動態(tài)除濕過程中溫度場梯度不大,但是濕度場梯度較大。當(dāng)有個別位置的濕度值達(dá)到控制值時(shí),經(jīng)過對此時(shí)裝備內(nèi)部空間的濕度值比較得出測點(diǎn)位置分布情況如圖2所示A,B處。
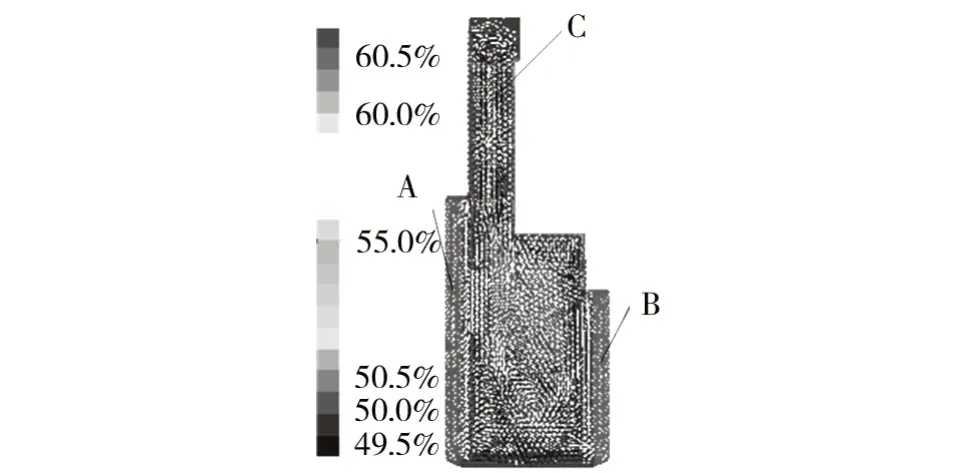
圖2 裝備內(nèi)部濕度分布及傳感器放置位置Fig. 2 Equipment distribution and the internal humidity sensors position
3 試驗(yàn)驗(yàn)證
通過對仿真數(shù)據(jù)的分析,從圖3 中可以看出整個封存空間內(nèi)部溫度場梯度不大,濕度的最高值位置為圖2中所示A與B所處的邊緣帶狀區(qū)域,并且在該區(qū)域內(nèi)部各點(diǎn)的相對濕度值均為60%,除2處邊緣帶狀區(qū)域外的其余部位濕度值都相差不大,相對濕度都集中在50%左右。結(jié)合上文中提出的傳感器配置原則,初步確定監(jiān)測傳感器的數(shù)目為2個,布點(diǎn)位置與仿真結(jié)果一致。
通過對封裝裝備動態(tài)除濕過程的仿真,得知最先達(dá)到濕度控制范圍的為圖2中的C處區(qū)域(干燥空氣進(jìn)風(fēng)口)。試驗(yàn)測量時(shí),在C處布置一個溫濕度傳感器,當(dāng)C 處的相對濕度值達(dá)到最優(yōu)控制范圍50%以內(nèi)時(shí),采集其余2點(diǎn)溫濕度值,見表1。
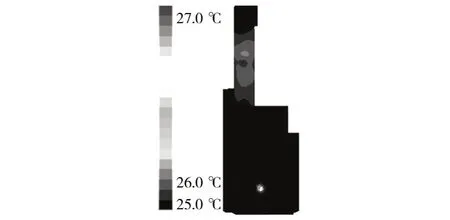
圖3 裝備內(nèi)部溫度分布Fig.3 Equipment temperature distribution
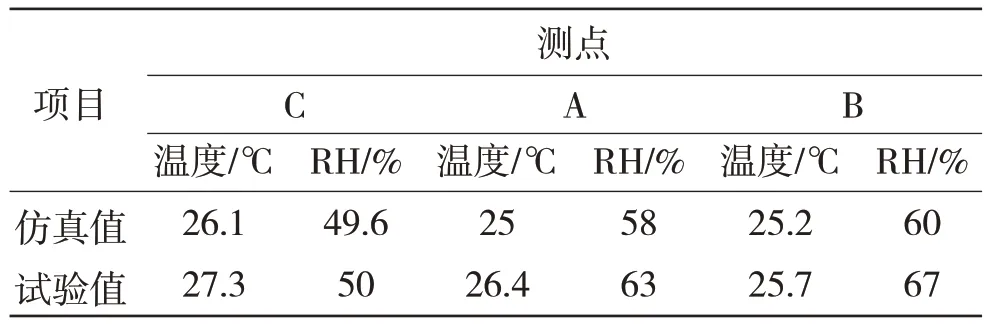
表1 仿真值與試驗(yàn)值Table 1 Simulation value with the experimental comparison
經(jīng)過實(shí)驗(yàn)論證,動態(tài)除濕過程中的濕度和溫度仿真值與測量值基本吻合,但仍然存在一定的誤差。存在誤差的原因主要是:
1)在建立物理模型時(shí),為了更方便地建立仿真模型而對封裝裝備內(nèi)部進(jìn)行了大量的簡化;
2)封裝裝備與外界環(huán)境存在熱交換,不是嚴(yán)格的密閉隔熱環(huán)境。
4 結(jié)語
1)提出了裝備快速封裝技術(shù)中傳感器配置的原則與具體實(shí)施方法。
2)應(yīng)用CFD 技術(shù)對封裝裝備整個除濕過程進(jìn)行了動態(tài)仿真,得出在動態(tài)除濕過程中溫濕度場的分布情況:溫度場梯度不大,但是濕度場梯度較大,分布情況較為復(fù)雜。
3)經(jīng)過仿真研究和實(shí)驗(yàn)論證確定了某型封裝裝甲裝備溫濕度傳感器配置的數(shù)目和位置。
對裝備快速封裝技術(shù)中傳感器的配置研究方法可推廣到其他裝備的封裝操作中,為進(jìn)一步研究封裝裝備狀態(tài)監(jiān)測奠定了基礎(chǔ)。
[1]王浚,黃本誠,萬才大,等.環(huán)境模擬技術(shù)[M].北京:國防工業(yè)出版社,1996:230—231.
[2]鄭鐵軍,張會奇,孟凡金.濕熱環(huán)境下裝甲裝備封存方法應(yīng)用研究[J].裝備環(huán)境工程,2010,7(4):95—96.
[3]YI Jiang, CHEN Qingyan. Study of Natural Ventilation in Buildings by Large Eddy Simulation[J]. Journal of Wind Engineering and Industrial Aerodynamics,2001,35(89):1155—1178.
[4]王瑞金.FLUENT技術(shù)基礎(chǔ)與應(yīng)用實(shí)例[M].北京:清華大學(xué)出版社,2007.
[5]陶文銓. 數(shù)值傳熱學(xué)[M]. 西安:西安交通大學(xué)出版社,2001:342—345.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
