實時遞推的最小二乘預測跟蹤算法
2011-03-14 05:12:54周姍姍柴金廣李丹
電子設計工程 2011年10期
關(guān)鍵詞:系統(tǒng)
周姍姍,柴金廣,李丹
(中國科學院上海技術(shù)物理研究所,上海200083)
對于一個探測系統(tǒng)來說,從傳感器采集圖像,到系統(tǒng)處理數(shù)據(jù)、識別目標、伺服控制、跟蹤目標的過程中,由于系統(tǒng)延時,會導致跟蹤數(shù)據(jù)的延遲,造成跟蹤誤差。此外,目標發(fā)生機動時,由于運動的速度和方向發(fā)生改變,也會造成實時跟蹤的困難。為了補償跟蹤誤差,達到實時、穩(wěn)定跟蹤目標的目的,本文提出了一種實時遞推的最小二乘預測跟蹤算法。
最小二乘法最早是由Gauss為進行行星軌道預測的研究而提出的[1],現(xiàn)在最小二乘法已成為用于目標跟蹤的常用方法之一。與其他方法(如:α-β-γ濾波、卡爾曼濾波)相比,最小二乘原理簡單,易于理解和掌握,且在一定條件下具有良好的統(tǒng)計性,因而更具有工程實現(xiàn)的意義。本文基于最小二乘法的原理,結(jié)合平方預測器的估算方式,采用遞推參數(shù)計算來實現(xiàn)目標的位置預測,解決由于系統(tǒng)誤差、目標機動等因素造成的跟蹤延遲、目標丟失的問題。
1 預測跟蹤算法
圖1給出了預測跟蹤算法的流程圖,系統(tǒng)每讀入新的一幀圖像,替換最舊的一幀歷史數(shù)據(jù),根據(jù)保存的幀目標數(shù)據(jù)遞推計算目標軌跡參數(shù),并由此預測下一幀目標位置。

圖1 預測跟蹤算法流程圖Fig.1Flow chart of predicted tracking algorithm
1.1 最小二乘原理
在探測系統(tǒng)跟蹤目標的過程中,目標的運動速度及方向會按照一定的運動規(guī)律隨時間不斷變化,為了從觀測數(shù)據(jù)中提出有用信號,首先需要對目標的運動規(guī)律做出假設[2]。
通常假設目標函數(shù)f(t)在N個順序時刻的觀測值為f(ti)(i=1,2,…,N),最小二乘的基本思想即選擇一個多項式p(t)用一種使均方誤差(在某種意義下)為極小的方式來逼近f(t)[3-4]。
對于探測系統(tǒng)來說,觀測值是離散的數(shù)據(jù),可以確定一組a0,a1,…,am(m<N)系數(shù),使得觀測值和逼近值的N點均方誤差

最小。
最小二乘多項式p(t)表示為

通過S對ak求偏導數(shù),令偏導數(shù)為0,可得到多項式的通解:

1.2 平方預測器
平方預測器以線性二次曲線作為目標函數(shù)f(t)的最佳逼近,即多項式p(t)表示為
則N點均方誤差為

運用最小二乘原理,計算最小均方誤差下最佳線性逼近的通解,即多項式系數(shù)a0、a1、a2,可以得到[5]:

式中,bmn(m,n=1,2,3)為行列式|M|的余因子,且|M|≠0。
1.3 實時遞推計算公式
考慮到實際應用中,在較短時間內(nèi),目標的運動或參數(shù)變化總可以用二次或低次函數(shù)描述[6],因此運用平方預測器得到的一組參數(shù)α,β,γ總可以最佳逼近某一段時間內(nèi)目標的運動軌跡,但隨著時間的增長,目標運動可能發(fā)生變化,原來的參數(shù)不再滿足目標運動的規(guī)律。因此,本文對于N點最佳線性逼近,采用實時更新參數(shù)的方式,即在每個目標數(shù)據(jù)采樣時刻k+N,利用歷史時刻k,k+1,…k+N-1,的N個點的測量值重新計算二次曲線的參數(shù)α,β,γ,以確保預測軌跡與真實目標軌跡的最佳逼近。因此,將上節(jié)公式(6)改進后可以得到實時遞推的參數(shù)計算公式:
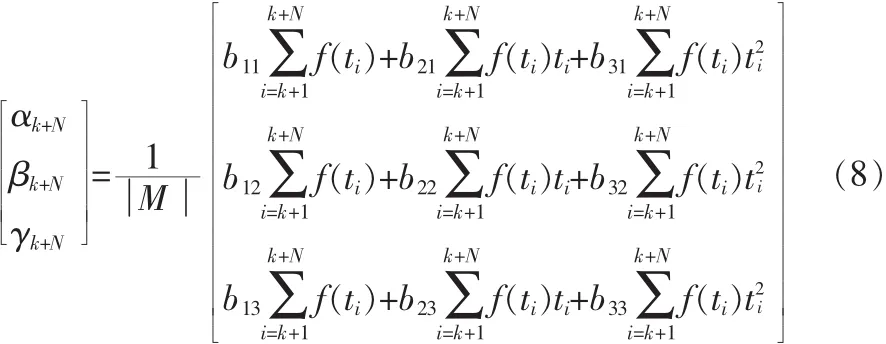
式中,k=0,1,2,…。
2 仿真實驗
為驗證算法在工程應用上的可行性,本文基于Matlab軟件針對系統(tǒng)延遲、目標機動這兩種情況進行了模擬仿真,本次實驗選取N=5。
圖2給出了真實軌跡在沒有發(fā)生系統(tǒng)延遲情況下的目標預測跟蹤軌跡與真實軌跡的比較結(jié)果。可以看到目標在某一段時間內(nèi)發(fā)生機動改變了軌跡方向,給定的目標軌跡采樣周期為T=0.005 s。

圖2 未發(fā)生延遲的預測跟蹤軌跡與真實軌跡的比較圖Fig.2Comparison of predicted tracking and real tracking at system in-time
考慮實際工程應用中的情況,假設系統(tǒng)延遲時間為一個采樣周期。圖3(a)給出了目標預測跟蹤軌跡與真實軌跡的比較結(jié)果,圖3(b)為圖3(a)軌跡初始部分的放大比較圖。
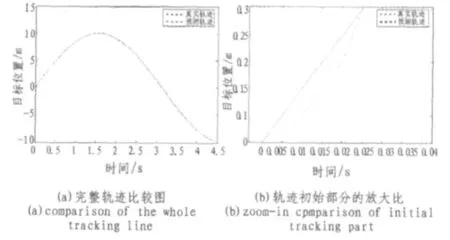
圖3 發(fā)生延遲的預測跟蹤軌跡與真實軌跡的比較圖Fig.3Comparison of predicted tracking and real tracking at system delay
如上圖可以看到預測跟蹤軌跡能夠很好地逼近真實軌跡,在發(fā)生系統(tǒng)延遲的情況下,從圖3(b)可以看到由于采用了5點平方預測,經(jīng)過初始階段的5個采樣周期后,目標軌跡誤差得到補償,并迅速逼近真實軌跡,此外,從圖3(a)中可以看出,當目標機動時,軌跡方向發(fā)生明顯改變,預測跟蹤軌跡仍舊能很好地逼近真實軌跡。
最后給出了預測軌跡與真實軌跡的誤差百分比,圖4(a)為系統(tǒng)未延遲時的誤差百分比,圖4(b)為系統(tǒng)延遲時的誤差百分比。表1則給出了兩種情況下具體的誤差百分比比較。
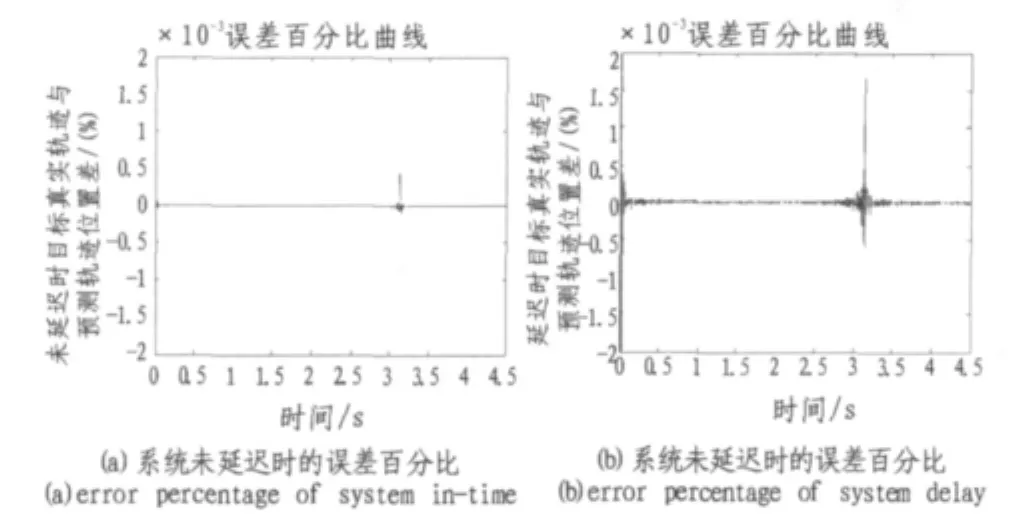
圖4 兩種情況下的系統(tǒng)誤差百分比Fig.4Error percentage of the two cases
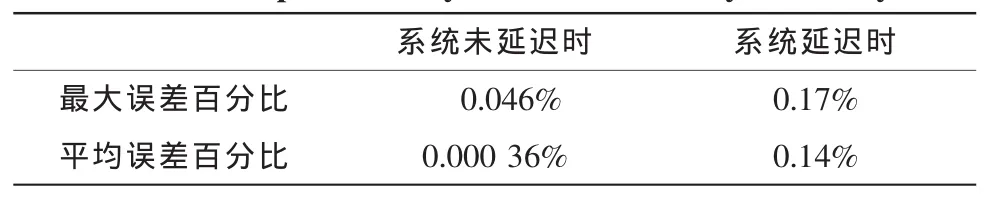
表1 系統(tǒng)未延遲與延遲情況下的誤差百分比比較Tab.1 Comparison of system in-time and system delay
如表1所示,雖然在系統(tǒng)延遲的情況下,預測軌跡與真實軌跡的誤差百分比較大,但平均誤差百分比控制在了0.15%以內(nèi),且可以看出預測跟蹤軌跡還是很好地逼近真實軌跡,沒有出現(xiàn)軌跡偏移發(fā)散的情況。
3 結(jié)束語
本文提出的實時遞推的最小二乘預測跟蹤算法,采用平方預測器的二次曲線函數(shù)作為目標軌跡的最佳逼近,經(jīng)過最小二乘估算得到的多項式通解,具有運算簡便、易于實現(xiàn)的特點。結(jié)合工程實際情況,改進后的算法通過仿真實驗驗證,跟蹤效果理想,具有工程應用的可行性。今后根據(jù)不同工程的指標要求,算法還可以在參數(shù)細節(jié)上進行修改,以達到最佳的預測跟蹤效果。
[1]強明輝,張京娥.基于MATLAB的遞推最小二乘法辨識與仿真[J].自動化與儀器儀表,2008(6):4-5,39.QIANG Ming-hui,ZHANG Jing’e.RLS identification and simulation based on Matlab[J].Automation&Instrumentation,2008(6):4-5,39.
[2]徐瑜,楊紹清,孫牧.最小二乘濾波在目標跟蹤中的應用[J].指揮控制與仿真,2007,29(4):41-42.XU Yu,YANG Shao-qing,SUN Mu.Application of least square filtering for target tracking[J].Command Control&Simulation,2007,29(4):41-42.
[3]F.施依德.全美經(jīng)典數(shù)值分析[M].2版.羅亮生,包雪松,王國英譯.北京:科學出版社,2002.
[4]張起貴,張魁.基于最小二乘直線擬合的小目標檢測[J].電子設計工程,2010,18(7):176-177,180.ZHANG Qi-gui,ZHANG Kui.Based on least-squares linear fiting for small targets detection[J].Electronic Design Engineering,2010,18(7):176-177,180.
[5]楊耿.運動目標的圖像識別與跟蹤研究[D].江蘇:江蘇大學,2005.
[6]秦暄,章毓晉.一種基于曲線擬合預測的紅外目標的跟蹤算法[J].紅外技術(shù),2003,25(4):23-25,31.QIN Xuan,ZHANG Yu-jin.A tracking method based on curve filtering prediction of IR object[J].Infrared Technology,2003,25(4):23-25,31.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32