測站天線目標自動捕獲跟蹤設計要點
2011-03-14 05:12:56侯錦余軍
電子設計工程 2011年10期
侯錦,余軍
(1.中國電子科技集團公司39所陜西西安710065;2.西安衛星測控中心陜西西安710043)
隨著我國航天事業的發展,近年來國家先后研制和生產了一批用于載人航天等工程任務需求的測控設備[1],控制中心要對各個測控設備進行遠程統一管理和調度,實現設備的遠程自動化運行,如何提高設備自動化運行能力這一問題顯得日益突出。目前,已有數套測控設備實驗性地采用了自動化運行技術,在設備自動化運行調試過程中,發現和解決了一系列影響設備遠程自動化運行的問題。本文將針對天線控制部分自動化運行的設計流程進行討論,對于影響自動化運行中目標自動捕獲跟蹤設計中主瓣識別、跟蹤維護以及遮蔽容錯維護等問題進行分析,進而提出行之有效的實施方案。
1 測站天線控制部分自動化運行流程設計概述
測站天線控制部分自動化運行軟件流程設計的主要依據是原來人工操作的運行流程。傳統人工操作按照任務或長管的時間區間劃分為設備標校和衛星軌道的計算、天線放置等待位置、衛星目標的捕獲跟蹤以及跟蹤結束后停止天線運轉并進行數據整理4大方面。
依據需求,在自動化運行中測站的各個設備需要協調工作,由設備監控單元(SMCU)制定或通過網絡向各個分系統分發工作計劃并提供統一的調度。設備的工作流程可劃分為任務準備階段、任務開始、目標跟蹤與維護階段和任務結束幾個子流程,對應于各個子流程產生時間驅動的工作計劃。在目標跟蹤階段中由天線控制單元(ACU)自動完成目標的識別和捕獲跟蹤,這是自動化運行中對天線控制單元的智能化和容錯能力的設計重點。
2 天線系統的硬件組成
目前測站的天線系統的硬件組成如圖1所示,主要由天線射頻設備、天線控制設備、天線結構設備和基帶設備(含跟蹤接收機)以及標校設備等組成[2]。ACU接收來自基帶接收機設備的鎖定信號、自動增益控制(AGC)電壓作為跟蹤進入的判斷條件,誤差電壓作為跟蹤運行時的位置閉環的誤差信號[3]。
3 目標自動捕獲跟蹤及跟蹤容錯的軟件設計要點
由于自動化運行中目標的識別和捕獲跟蹤由人工更改為程序自動捕獲轉入跟蹤,因此如何判斷目標出現、判斷目標進入主瓣、切入跟蹤方式和防止誤跟蹤是目標捕獲跟蹤程序設計的要點,其中主瓣識別和防止副瓣跟蹤以及跟蹤過程中的容錯維護是程序設計的難點。

圖1 天線系統組成框圖Fig.1Block digram of antenna system
3.1 主瓣識別設計
傳統的人工主瓣識別由操作手根據經驗設定AGC跟蹤門限,當目標AGC電平高于該門限認為是目標進入主瓣,可切入跟蹤。在自動化運行下為了避免AGC電壓的非線性,真實反映信號的信號強度,可使用與AGC對應的S/Φ進行判斷,即當目標的S/Φ高于設定的主瓣門限則認為目標已進入主瓣,可以切入跟蹤。S/Φ的標定一般由基帶設備自行標定,并通過參數數組裝訂至天線控制軟件。
常規的解決方法是對于使用引導天線的天線系統,利用引導天線的S/Φ與主天線的S/Φ一同參與主瓣識別,即主天線的S/Φ應固定比引導天線的S/Φ高出某一門限值,該門限為系統的設計值,由兩個天線的增益決定。對于沒有引導天線的系統則使用標定的門限進行判斷。在自動化運行下,兩種天線系統的門限值均由SMCU下發至ACU。但是在實際運行中,在信道和基帶設備組合較多以及信號衰減程度不同的情況下,門限的標定和調用可能存在誤差,僅用標定的門限不能最大程度的保證識別結果正確。
因此要對上述方法進行優化,由于引導天線的波束范圍是主天線的數倍乃至十倍,如圖2所示,引導跟蹤零點與主天線零點基本重合[3],因此在發現目標進入跟蹤上比主天線有很多優勢,因此對于使用引導天線的天線系統,可以使用引導天線閉環一同參與主瓣識別,即在主瓣識別之前先進行引導天線的跟蹤閉環,再進行主瓣判斷,滿足主瓣條件轉入主天線的跟蹤閉環,這種方法比單純的使用主天線接收機S/Φ與引導天線接收機S/Φ之差滿足設定門限有著更高的準確性,可大大提高主瓣識別的成功率。
對于沒有引導天線的天線系統,為了提高主瓣識別的準確性則可采用公式(1)實時計算目標主瓣內的S/Φ值,計算公式為:

其中,GT值為主天線的增益;EIRPS為衛星的有效輻射功率;R為目標距離測站的距離;f為工作的點頻;K為波爾茲曼常數;
通過實時計算目標當前S/Φ值與公式實時計算的主瓣S/Φ值相比來確定目標是否進入主瓣可以切入跟蹤。

圖2 主天線和引導天線方向圖Fig.2Directional graph of main and antenna pattern
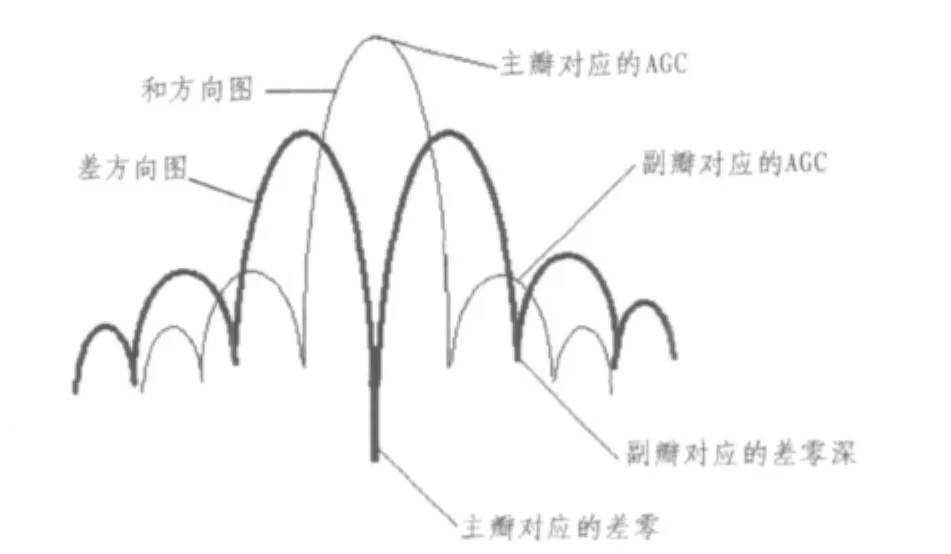
圖3 主副瓣方向圖Fig.3Directional graph of main-lobe guide and side-lobe
3.2 跟蹤容錯維護
有了主瓣識別方法,就可以據此進行目標的捕獲和跟蹤,為了最大限度地避免系統處于副瓣跟蹤[4]和誤跟蹤,要對跟蹤進行容錯維護。當目標判定進入主瓣時,程序先進行跟蹤閉環一段時間如2~3 s,在這段時間內采集跟蹤的各個狀態以判斷跟蹤質量是否滿足要求即是否準確進入了主瓣跟蹤。
對于跟蹤質量監測,軟件采集的狀態主要有AGC電壓、方位和俯仰的誤差電壓以及鎖定信號,方位、俯仰誤差電壓的平方和的均方根可表示為天線電軸偏離目標映射在空間位置,主瓣跟蹤時該值應趨近于0[5];在副瓣跟蹤時,由于系統差零深的斜率變化,如圖3所示,系統環路的增益將發生變化,跟蹤時誤差電壓比主瓣跟蹤時的特性要差。因此若誤差電壓特性不滿足要求且AGC信號的迅速跌落則認為跟蹤至副瓣;鎖定信號的失鎖可以認為目標已經丟失,這些均可認為目標捕獲失敗,需要進行目標的重新捕獲。
由于AGC、誤差電壓和鎖定信號均來源于基帶設備,基帶設備的信號通過天線系統接收,再經過信道和變頻,除了副瓣信號質量不滿足要求以外,若目標信號異常或者整個通路設置錯誤、出現故障也可導致誤差電壓等信號的異常,但這種情況下目標反復捕獲都不能滿足跟蹤質量,將會引起天線反復捕獲,因此要對于目標捕獲次數進行限制,以免程序控制天線在反復捕獲目標的過程中。

圖4 程序流程設計Fig.4Flow chart of software design
在目標的跟蹤維護流程中還需要考慮遮蔽的影響,在某些測站的跟蹤弧段內存在建筑物或者山體對目標信號造成遮擋,引起信號衰弱或者丟失,因此程序必須提前知道目標進入和離開遮蔽的位置,以便做出正確的處理。在目標跟蹤過程中程序需要實時計算目前方位角度下的俯仰遮蔽狀態,如遇遮蔽且天線處于跟蹤狀態,則將天線運行方式由跟蹤切入程引或者數引,待遮蔽狀態消失后,進行目標的重新捕獲流程,滿足跟蹤條件則重新進入跟蹤狀態,因此目標捕獲和跟蹤容錯處理程序采用圖4所示的流程進行設計。
4 結束語
筆者參加了近幾年新研、改造的測控設備的自動化設計和現場聯試[6],文中提及的問題為天線控制設備自動化現場聯試目標捕獲與跟蹤遇到的關鍵性問題,通過對問題的機理進行了分析總結,設計相應的算法對這些關鍵性問題予以解決,并應用于某12 m測控天線,實踐證明這些方法可提高測控設備天線控制設備的目標捕獲和跟蹤的成功率,有效地避免副瓣跟蹤,保證自動化運行可靠性和效率。希望本文提及的方法對后續設備的自動化運行提供有益的參考信息。
[1]魯盡義.航天測控系統測角分系統[M].西安:中電科技集團公司39所,2006.
[2]夏福梯.防空導彈制導雷達伺服控制[M].北京:宇航出版社,1996.
[3]周朝棟,王元坤,楊恩耀.天線與電波[M].西安:西安電子科技大學,1994.
[4]李萍,張林讓.精密跟蹤雷達伺服系統的設計與仿真[J].電子科技,2007(4):54-56.LIPing,ZHANGLin-rang.Designandsimulationof precision tracking radar antenna servo system[J].Electronic Science and Technology,2007(4):52-56.
[5]沈民誼.衛星通信天線、饋源、跟蹤系統[M].北京:人民郵電出版社,1991.
[6]顧繩谷.電機及拖動基礎[M].北京:機械工業出版社,1994.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00