基于電感傳感器的鋼珠直徑分選器設計
2011-03-14 12:39:38陳育中
電子設計工程 2011年2期
陳育中
(1.河海大學 江蘇 南京 210098;2.江蘇聯合職業技術學院南京分院 江蘇 南京 210019)
傳感器是采集和獲取信息的工具,又稱“電五官”[1]。傳感器及其技術應用非常廣泛,已經滲透到家居、農業、工業、醫學、軍事、環保、交通等各行各業,對系統的自動化程度和測控質量起著重要的作用。現代工業生產中,常需要測量并判別鋼珠工件的直徑是否在允許范圍之內,需要與一標準直徑進行比較才能得出結論,僅憑人工檢測在速度、精度上都不現實,必須借助先進的技術實現自動檢測。有效地獲取被測信號是關鍵所在,獲取信號的最佳元器件就是傳感器,本文選用電感傳感器(Inductance Type Transducer)作為信號拾取源,將被測部件幾何尺寸的微小變化轉換為線圈的電感變化實現測量,具有工作可靠、靈敏度高、壽命長、線性好、分辨率高、精度高、性能穩定和重復性好等優點。
1 電感傳感器
在測量技術中,電感傳感器廣泛用于加速度、位移、振幅、轉速、無損探傷等非電量的測量[2]。在其控制系統中,鋼珠直徑分類選擇器(簡稱分選器)是1個微位移檢測裝置,實現對鋼珠尺寸的檢測與計數,是電感式傳感器的典型應用。本測控系統采用博世力士樂傳感實驗裝置,由傳感器實驗臺、直流穩壓電源、傳感器、直流電機和信號處理電路模塊組成[1]。
1.1 基本結構
電感式傳感器的激勵元件由線圈和鐵氧體磁心組成,如圖1所示。 式(1)為電感式傳感器的數學模型[1,8]。

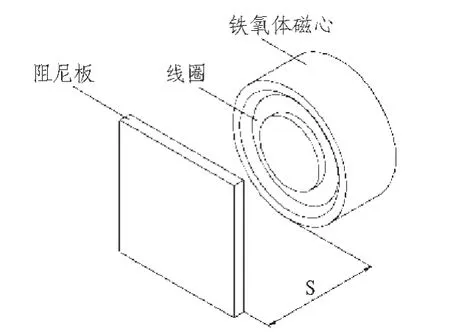
圖1 激勵元件Fig.1 Incentive element
式(1)中L為電感量,N為線圈的匝數,μ為氣隙導磁率,S為氣隙截面積,δ為氣隙厚度。
可知,線圈電感量L與氣隙厚度δ成反比,與氣隙截面積S成正比。假設起始位置的氣隙為δ0,對應的初始電感為L0,且S固定不變,當δ有細微變化為Δδ時,引起的自感量的變化量dL為(忽略高次項)[2]:

1.2 工作原理
電感式傳感器是建立在電磁場理論基礎上,是利用被測量磁路磁阻變化引起傳感器線圈自感或互感系數的變化,從而導致線圈電感量變化來實現非電量測量[1-3]。
當交流電流過線圈時,線圈產生交變磁場,該磁場通過鐵心并指向鐵心一側,即傳感器的激勵端。當有金屬物體或磁性物體接近傳感器激勵端時會造成磁場變形。使用計算機模擬可獲得磁場狀態圖,如圖2所示。從圖2可以看出導電材料(如鋼板)接近激勵端時的磁場效應,變化的磁場導致傳感器線圈的阻抗發生變化。
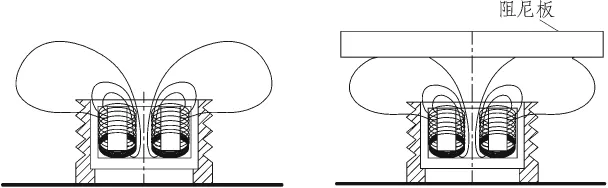
圖2 磁場狀態圖Fig.2 State chart of magnetic
傳感器線圈構成變壓器初級繞組,金屬板構成短路次級繞組,如圖3所示。由于電感耦合作用,在次級回路中產生的感應電流i2又反作用于初級回路,從而產生互感系數M12。最終使得線圈本身的阻抗發生變化[2]。通過與理想變壓器回路比較,可得出以下結論:
初級回路:

次級回路:

則初級回路阻抗:

實部:

虛部:

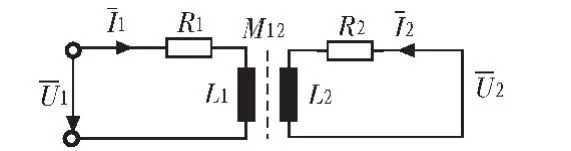
圖3 變壓器等效電路圖Fig.3 Circuit of transformer equivalent
綜上所述,當有導電材料接近傳感器時,線圈的阻抗Z實值增加,其值等于線圈電阻R1加上R2、L2、M12及ω產生的阻抗。經驗表明,阻抗Z的虛值只表明傳感器線圈與金屬板之間有很小間距時的測量變化。電感式傳感器只能利用阻抗Z的實值變化量檢測導電材料被測物體。
2 工業應用
2.1 功能分析
對鋼珠的標稱直徑(9.000 mm)進行控制,允許公差范圍為±3 μm,在此范圍之內為合格產品,應予保留,超出此范圍即為次品,應予剔除,并自動統計合格產品與次品的數量。將拾取信號(誤差信號)與對標準信號(9 mm值)對比,如果在±3 μm范圍內,則合格產品自動計數(C1=Cn1+1),如果超出這個范圍,則次品自動計數(C2=Cn2+1),當合格產品數與次品數只和等于產品總數時,自動退出檢測系統[2-3]。電路設計流程如圖4所示。
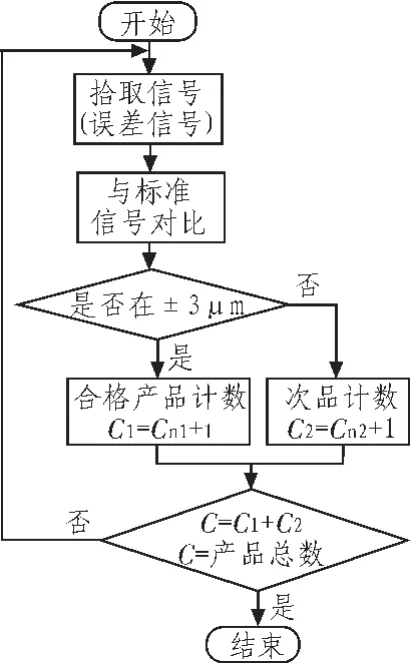
圖4 電路設計流程Fig.4 Design of process circuit
2.2 系統框圖設計
根據電感傳感器的工作原理,配合電氣動控制電路,設計檢測電路。該電路分為機械控制和電氣測量兩個電路部分。機械控制部分主要完成電感傳感器的選擇、鋼珠的推動與定位、氣缸和料箱翻板控制功能;電氣測量部分主要完成信號拾取、信號處理和執行顯示功能。檢測過程中,可以采用數字示波器進行輸出信號的動態觀察和測量[4-5]。鋼珠直徑分選器測控系統電路原理框圖如圖5所示。
2.3 工作原理
2.3.1 機械控制電路
當氣缸進氣口A有0.8 MPa的高壓進氣時,氣缸前室殘留氣體由B口排除,活塞自左向右推行,將放料口的鋼珠推向電感傳感器的下方,供其拾取信號[2,6]。檢測過程中,活塞將受到電磁閥驅動電路的控制,活塞的出氣口B改為進氣口輸入0.8 MPa的高壓氣,進氣口A改為出氣口排除活塞內的氣體,活塞自動恢復初始狀態,等待下一次鋼珠的到來。為了精確地計數每個鋼球的尺寸,以9 mm為鋼珠的標準直徑,按1 μm 差值為單位劃分-3、-2、-1、0、1 、2 、3 μm、 次品 8 個等級,對應8個收料箱,每個收料箱上端的翻板都是可控制的活動板,由8個與之一一對應的電磁鐵驅動電路控制,最后通過計數裝置將每個尺寸鋼球的統計結果反饋給計算機并顯示出來。
2.3.2 電氣測量電路
1)信號拾取模塊
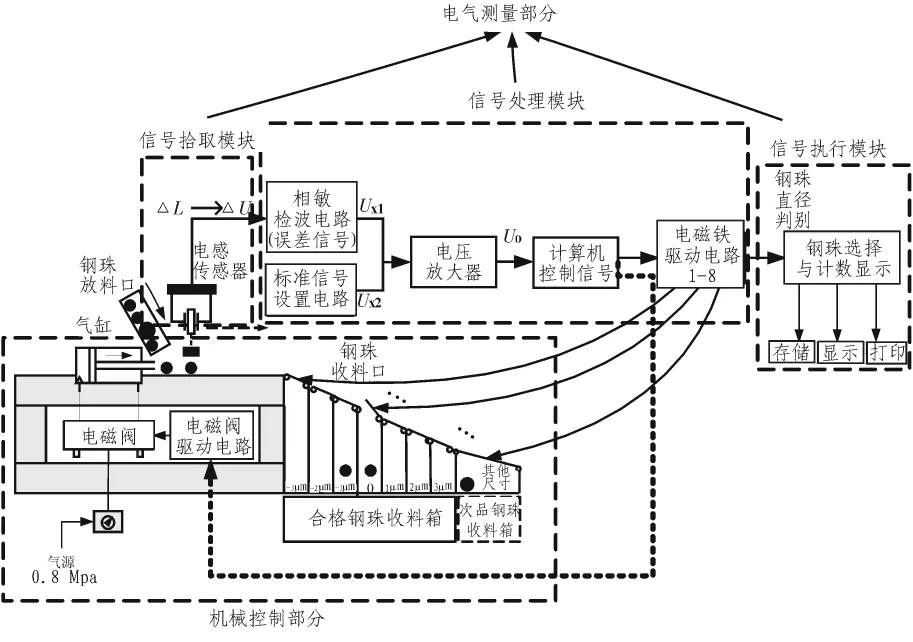
圖5 電路原理框圖Fig.5 Circuit principle diagram
本例中,考慮到1 μm數量級的檢測精度比較高,檢測傳感器的選擇是否得當對最后的結果影響很大,選擇合適的傳感器可以將干擾減少到最少。所以采用AD698[7]高精度線性差動式電感傳感器 (LVDT:Linear Variable Differential Transformer)為信號拾取電路,以磁芯的機械位移為輸入,交流電壓信號為輸出,該電壓與磁芯位置成正比。傳感器初級線圈由外部參考正弦波信號源激勵,兩個次級線圈反向串聯,磁芯的移動可改變初級線圈之間的耦合磁通,從而產生兩個幅值不同的交流電壓信號,以滿足后續電路的信號要求。
2)信號處理模塊
由相敏檢波電路、標準信號設置電路、電壓比較放大電路和電磁驅動電路組成[8]。以相敏檢波電路為核心,完成鑒別調制信號相位和選頻功能,如圖6所示。>0時,uyi與uyo同頻同相。
當uyi與uy0都是正半周時,T1的次級線圈輸出電壓u1為上正下負,根據同名端標識,u2也為上正下負;T2的次級線圈輸出電壓u01為左正右負,根據同名端標識,u02也為左正右負。根據電路分析原理[3]可知,各級變壓器的次級輸出為:


回路電流為:

輸出電壓為:

當uyi與uy0都是負半周時,分析同理。
當銜鐵在零點(中點)以下移動,即位移 x(t)<0 時,uyi與uyo同頻反相。
此時,無論uyi與uy0是正半周還是負半周,輸出電壓為:

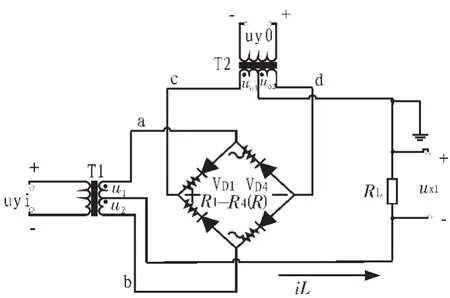
圖6 相敏檢波電路Fig.6 Phase sensitive detector
(其中,“—”反映了相位的關系,相差180°)
總之,相敏檢波電路的輸出電壓的變化規律反映了位移的變化規律,即ux1的大小反映了位移x(t)的大小變化,其極性反映了位移x(t)的方向(正向位移輸出正電壓,負向位移輸出負電壓),各電壓之間的波形圖如圖7所示。
如圖7,ux1的每個周期可以分為4個階段:
第1階段:正半周上升段,ux1>0,且呈增大趨勢,可知為銜鐵向上運動;
第2階段:正半周下降段,ux1>0,且呈減小趨勢,可知為銜鐵向下運動;
第3階段:負半周下降段,ux1<0,且呈增大趨勢,可知為銜
①相敏檢波電路
電路組成:4個性能一致的整流二極管VD1~VD4串聯成一個閉合的電橋,4個節點 a、b、c、d分別 接在變壓器 T1、T2的次級線圈上,輸入信號uyi與檢波器的參考電壓uy0分別經過T1、T2夾在電橋的兩個對角,電橋中電阻R1~R4為限流電阻,阻值都為R,起保護所在橋臂二極管的作用。u0>>uyi=u1+u2,且與uyi同頻,以保證準確控制4個二極管的導通狀態。
②工作原理:當銜鐵在零點(中點)以上移動,即位移x(t)鐵向下運動;
第4階段:負半周上升段,ux1<0,且呈減小趨勢,可知為銜鐵向上運動。
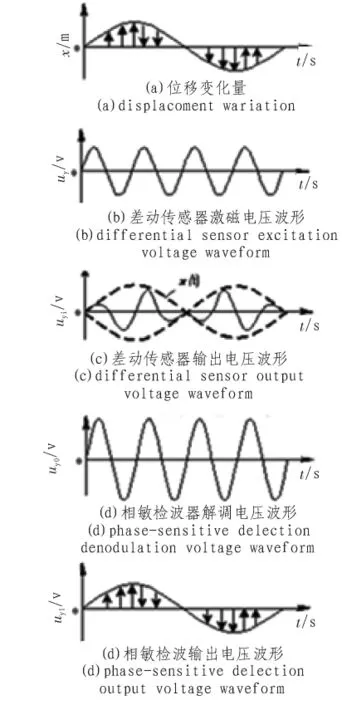
圖7 相敏檢波電路的波形Fig.7 Waveform of phase sensitive detector
③其他電路
為了便于分析, 由 R1、RP1、RP23 電阻組成 9mm、9mm±3 μm、任意標準等級設置成標準信號檔,可以通過選擇不同的標準檔,滿足各種標準量與相敏檢波信號(誤差信號)進行比較[9]。當信號相同(在誤差范圍內)時,則通過電壓放大器,驅動電磁控制器1~7,打開相應的鋼珠收料箱,并統計個數。當信號不相同(超出誤差范圍)時,則通過電壓比較放大器,驅動電磁控制器8,打開次品鋼珠收料箱,并統計個數,如圖8所示。
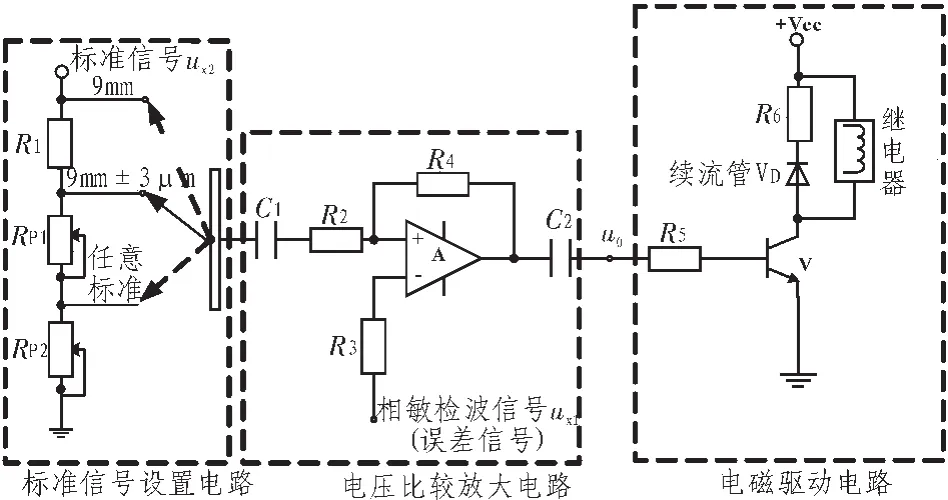
圖8 其他電路Fig.8 The other circuit
3 信號執行模塊
將選擇結果通過計算機,實現數據存儲、打印和顯示功能[10]。
4 結論
該電路系統選用AD698高精度線性差動式電感傳感器,將其所檢測的細微位移量經過相敏檢波、比較放大等信號處理電路,轉換為相應的電壓信號,輔以合適的電氣動控制電路,最后通過電磁驅動器、計數器把信號傳輸給計算機,實現顯示、打印、存儲功能,這是該電路的優點。但也存在不足和問題,電路中需要設計很多個電磁驅動電路,可能會出現誤動作,可嘗試在電路中利用信號互鎖作用,實現當其中某一個收料箱動作時,其他收料箱均不發生動作,以此來克服這個問題。
[1] 陳育中.霍爾傳感器測速系統的設計[J].科學技術與工程,2010(31):84-86.CHEN Yu-zhong.Design of the velocity-measuring system of Hall sensor[J].Science Technology and Engineering,2010(31):84-86.
[2] 傳感器技術培訓包理論手冊[M].德國:力士樂,2007.
[3] 胡向東、劉京誠、余成波,等.傳感器與檢測技術[M].1版.北京:機械工業出版社,2009.
[4] 康華光.電子技術基礎:數字部分 [M].4版.北京:高等教育出版社,2004.
[5] 王棟.電感傳感器在錐軸承測量中的改型應用[J].傳感器技術,2006(12):76-77.WANG Dong.In the cone bearing, inductance sensor measurements in the retrofit applications [J].Journal of Sensor Technology, 2006(12):76-77.
[6] 胡向東,彭向華,李學勤,等.傳感器與檢測技術學習指導[M].1版.北京:機械工業出版社,2009.
[7] 劉春梅,冷杰,崔巖梅,等.一種電感式位移傳感器的電路系統設計[J].理論與實踐,2008,3(28):12-14.LIU Chun-mei,LENG Jie,CUI Yan-mei, et al.An inductive sensor circuit system design [J].Journal of Theory and Practice, 2008,3(28):12-14.
[8] 陳育中.模擬量電感傳感器在螺紋孔徑識別系統中的應用[J].現代電子技術,2010(18):101-103 CHEN Yu-zhong.Analog inductive sensor in screw-type aperture recognition applications [J].Modern Electronics Technique,2010(18):101-103.
[9] 賀水燕,蔡靜.自制電感傳感器測量微小位移[J].實驗室研究與探索,2008,2(27):33-35.HE Shui-yan,CAI Jing.Homemade inductance measuring tiny displacement sensor[J].Journal of Laboratory Research and Exploration, 2008,2 (27):33-35.
[10] 洪小麗.電感傳感器測量電路設計與改進[D].湖南:中國人民解放軍國防科學技術大學,2003.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12