怠速模糊控制算法的研究
2011-03-14 12:39:40鄭俊強劉海朝祁儒明趙冬冬徐學瀅郭旺喜
電子設計工程 2011年2期
鄭俊強,劉海朝,祁儒明,趙冬冬,徐學瀅,莫 非,郭旺喜
(1.華北水利水電學院 機械學院,河南 鄭州450011;2.國網電力科學研究院 江蘇 南京 210061;3.中國重汽集團 山東 濟南250001)
汽油機怠速工況是一個很重要的工況,汽車在交通密度大的城市中行駛時,約有30%的燃油消耗在怠速階段。為了滿足日益嚴格的油耗和排放法規的要求,應該盡可能地降低怠速的轉速,但必須保持怠速轉速的穩定性。在怠速工況時,冷卻水溫的變化、空調裝置、自動變速器、動力轉向機構等的接入及進氣、供油、點火、著火、燃燒等因素的變化都可能改變怠速轉速,使汽油機轉速不穩。這些因素共同作用的結果是使怠速過程變成一個相當復雜的系統[1]。
假如怠速轉速越低,廢氣的稀釋作用就越明顯,因此必須供給較濃的混合氣,其結果就是燃燒不完全,HC和CO有害排放物增加。所以怠速控制的目的就是保證發動機怠速時穩定在最低可能轉速,節省燃油并減少排放[2-3]。因此人們開發了各種各樣的怠速控制方法。本文在綜合分析了各種怠速控制方案的基礎上,提出了怠速轉速模糊控制方案。
1 模糊控制
模糊控制采用的是人類語言信息,模擬人類思維,其易于接受,設計簡單,且抗干擾能力強。模糊控制器基于包含模糊信息的控制規則,在改善系統特性時,模糊控制系統除了像常規控制系統那樣能調節參數外,還可以通過PID控制流程圖改變控制規則、隸屬函數、推理方法及決策方法來修正系統特性。因此,模糊控制器設計、調整和維修相對簡單[4]。
為了獲得最佳的性能,控制器的增益經常是手動調節的。但由于發動機是一個復雜的非線性系統,并且發動機的性能隨著使用年限的變化也是在不斷變化,因此這種調制方法往往并不是很精確。許多研究者也就提出了采用模糊邏輯控制的方法來實現發動機的怠速控制。由于模糊控制的最大特點是不需要控制對象精確的數學模型,善于解決模型不確定的控制問題,所以適用于存在顯著時變性、非線性和存在不確定因素的發動機怠速控制。
模糊控制的對象通常是一個復雜的非線性系統,由于大量模糊信息的存在而難以精確描述,無法建立適當的數學模型加以控制。模糊技術針對這一情況繞過建模的困難,通過在考察區域劃分模糊子集,對獲得的信息構造隸屬函數,再按照控制規則和推理法則作出模糊判決而進行相應的控制。模糊控制的輸入量是整個系統輸出量與預定值的誤差和該誤差的變化率,控制規則由操作者的經驗加上針對性的實驗結果總結而成。輸入信息通過隸屬函數,將精確的測量值轉化為模糊量,接著通過模糊推理得出相應的模糊判決,最后轉換為精確的控制輸出量。
1.1 模糊控制器的基本結構
模糊控制器是模糊控制系統的核心,主要由模糊化(Fuzzification), 模 糊 推 理 (Fuzzy inference) 和 反 模 糊 化(Defuzzification)3部分組成,模糊控制器的輸入量是精確值,經模糊化后轉換成模糊輸入。根據輸入條件滿足的程度和選定的控制規則進行模糊推理得到模糊輸出,該模糊輸出經過反模糊化轉化成精確值后作為模糊控制器的輸出。模糊控制器3部分的共同基礎是知識庫,它包含模糊化所用的隸屬函數(Membershipfunction)、模糊推理的控制規則(Control rule)及反模糊化所用的公式。其中控制規則決定了控制器的主要性能,其結構如下圖1所示。
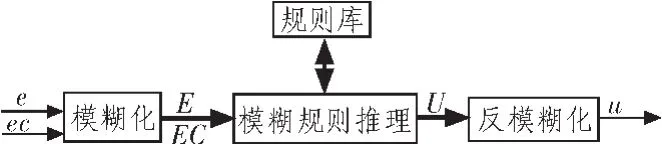
圖1 模糊控制器的結構Fig.1 Structure of fuzzy controller
1.2 模糊控制器設計概述
模糊控制器的設計可概述為6個步驟:確定模糊控制器結構、確定控制規則、確定變量論域和量化因子、定義各模糊狀態的隸屬函數、確定模糊推理關系、判決。
模糊控制算法的設計主體就是建立模糊控制器和控制對象的模糊模型并確定模糊推理方式。模糊模型通常用一組模糊蘊含條件句即模糊語言規則來描述,主要有Madam、Takagi-Sugen兩種表示方式。前者的蘊涵條件句中后件是用語言值表示的模糊集合,而后者則用輸入量的線性函數表示[5]。
1.3 怠速系統的模糊控制器的設計
由于MATLAB具有強大的動態系統仿真功能,針對各類學科推出了不同的配套工具箱,便于進行復雜、交義系統的建模,因此被作為系統的仿真平臺。本文借助MATLAB的模糊工具箱設計了一個模糊控制器,并采用發動機平均值模型作為控制對象,進行仿真。
怠速模糊控制器以轉速偏差e(給定轉速值與實際轉速值之差)、轉速偏差變化率ec作為輸入變量,以節氣閥開度的變化量作為輸出變量。
偏差e對應的是語言變量E,將其分為8個模糊狀態:負大(NL),負中(NM),負小(NS),負零(NO),正零(PO),正小(PS),正中(PM),正大(PL)。 根據實驗觀察,e 的變化范圍為[-120,120]r/min,所取的模糊集論域為[-6,6],因此它的模糊量化因子為6/120。同時,將偏差變化率ec所對應的語言變量 EC 分為 7 檔:負大(NL),負中(NM),負小(NM),零(O),正小(PS),正中(PM),正大(PL)。 根據實驗觀察,ec的變化范圍為[-24,24]r/min,所取的模糊集論域為[-6,6],因此它的模糊量化因子為6/24。
輸出量即節氣閥開度的變化范圍為[-90,90],開大為正號,關小為負號,模糊變量用U表示,它也取7個模糊子集,其形式與EC相同。模糊集論域為[-7,7],因此它的模糊量化因子為90/7。
盡管影響怠速轉速的因素很多,但按操作人員的經驗,有控制原則:若實際轉速高于目標轉速,則減小節氣門閥門開度,降低轉速,差值越大,減小節氣門閥門開度越大;若實際轉速低于目標轉速,則增大節氣門閥門開度,差值越大,增大節氣門閥門開度越大;若實際轉速高于目標轉速并且升高的趨勢快,則稍微多開大一些節氣門閥門開度,若升高的趨勢較慢甚至呈下降趨勢,則少開大一些節氣門閥門開度;同理,若實際轉速低于目標轉速時,其變化趨勢與減少的節氣門閥門開度之間的關系剛好相反[6]。
以下是利用MATLAB的模糊控制工具箱制作的模糊控制器[7-8],圖2為利用器模糊控制器設定輸入量以及輸出量,圖3為廟宇模糊控制規則,表1為模糊控制規則表。
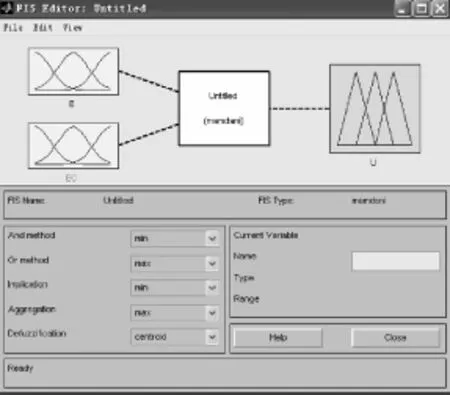
圖2 圖形化編輯器圖Fig.2 FIS editor
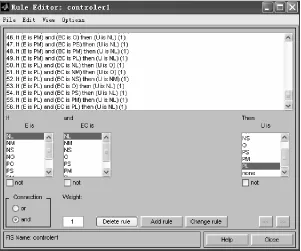
圖3 模糊規則編輯Fig.3 Fuzzy rule editor
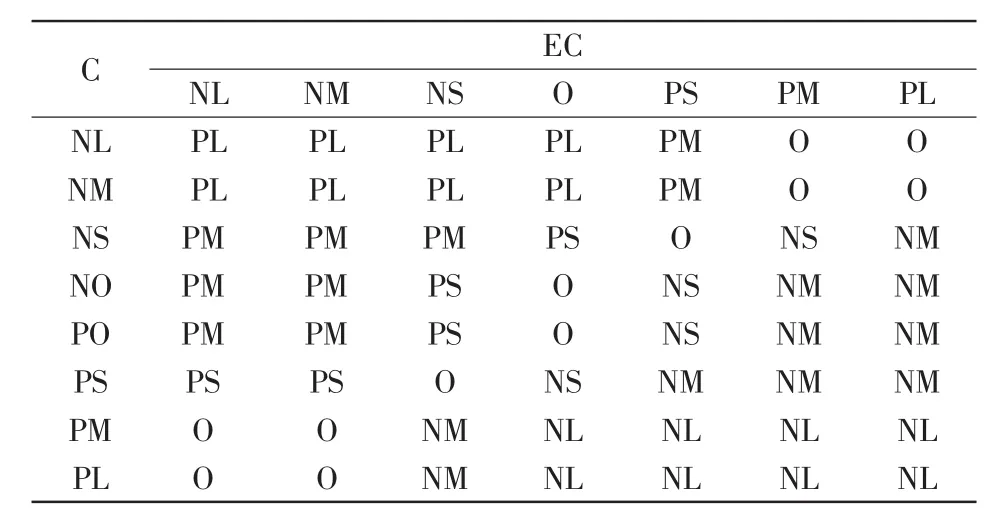
表1 模糊控制規則表Tab.1 The rule of fuzzy control
1.4 系統仿真
利用以上設計的模糊控制器,結合發動機怠速控制模型(這個也需要進行建模)可以仿真出發動機處于怠速工況的近似轉速變化情況,其系統仿真圖如圖4所示。
以下是對系統仿真的結果分析:

圖4 怠速模糊控制系統仿真圖Fig.4 Structure diagram of idling fuzzy control system simulation
1)在無任何輸入和干擾的情況下的系統響應,從圖5可以看出,怠速系統穩定在1 000 r/min的目標轉速,即不會在目標轉速時振蕩,因此滿足控制要求。

圖5 目標轉速為1 000 r/min時的響應曲線Fig.5 Response curves when the goal rpm is 1 000 r/min
2)增加或者減小負荷時系統的響應曲線如圖6所示。
從圖6可以看出,汽車在怠速時出現擾動能在極短時間內做出反應,因此滿足控制要求的穩定性。
2 結論
本文針對車用發動機怠速轉速的穩定性和怠速時的排放性能設計了模糊控制算法,并進行了試驗驗證,仿真結果表明:1)模糊控制可以滿足基本的控制要求,具有一定的跟隨性和抗干擾能力;2)模糊控制器的設計過程中不需要被控對象的精確數學模型,具有較強的魯棒性和自適應性。
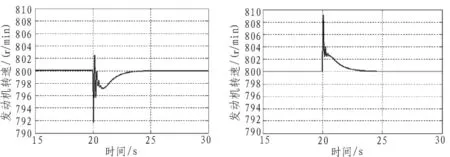
圖6 怠速時出現干擾的響應曲線Fig.6 Response curves when the interfere occurs at idle
[1] 樸明姬.汽車發動機怠速控制中的魯棒控制方法研究[D].黑龍江:哈爾濱工業大學,2008.
[2] 吳建華.汽車發動機原理[M].北京:機械工業出版社,2005.
[3] 譚德榮,嚴新平,劉正林,等.汽油機怠速穩定性控制技術研究[J].山東內燃機,2004(1):1-5.TAN De-rong, YAN Xin-ping, LIU Zheng-lin,et al.Study on idle speed stability control technologies for gasoline engines[J].Shandong Internal Combustion Engine,2004(1):1-5.
[4] 杭勇.柴油發動機控制模型及控制算法的設計與仿真研究[D].江蘇.江蘇理工大學,2002.
[5] 郭明.汽油發動機怠速控制的研究[D].黑龍江:哈爾濱工業大學,2009.
[6] 楊海燕.汽車發動機怠速控制技術的研究[D].河北:河北工業大學,2007.
[7] 劉寧.基于LabVIEW直流電機PID控制系統的設計[J].工業儀表與自動化裝置,2010(5):74-76.LIU Ning.The design of PID control system based on LabVIEW for DC motor[J].Industrial Instrumentation&Automation,2010(5):74-76.
[8] 張涇周,楊偉靜,李想.模糊自適應PID在高空模擬艙中壓力控制的應用研究[J].工業儀表與自動化裝置,2010(1):21-24.ZHANG Jing-zhou,YANG Wei-jing,LI Xiang.Application research of fuzzy self-adaptive PID control in pressure control system of high-altilude simulation cabin[J].Industrial Instrumentation&Automation,2010(1):21-24.
猜你喜歡
流程工業(2022年3期)2022-06-23 09:41:08
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
煤氣與熱力(2021年3期)2021-06-09 06:16:18
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
汽車與新動力(2015年1期)2015-02-27 12:11:01
中學科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39