基于干擾觀測器PID在主蒸汽溫度控制系統的應用
2011-03-14 00:22:18沈繼忱程玉偉
黑龍江電力 2011年3期
沈繼忱,程玉偉
(東北電力大學自動化工程學院,吉林吉林132012)
0 引言
火電廠主蒸汽汽溫的控制水平的高低直接影響到鍋爐的熱效率和過熱器管道、汽輪機等設備的可靠運行[1]。主蒸汽溫度的自動控制回路是火電廠鍋爐重要的控制回路之一,同時也是廠方最關注和最難控制的1個回路。傳統的火電廠主汽溫控制方法一般采用常規的PID串級控制策略[2]。然而,采用傳統常規的PID控制策略很難取得滿意的控制效果[3]。對此,提出一種基于干擾觀測器的PID控制算法,即在1個常規PID控制器的基礎之上增加1個干擾觀測器,在主汽溫控制中引入等效的補償,通過Matlab仿真,以達到良好的控制品質。
1 主汽溫控制特性
主蒸汽溫度自動控制是通過噴水減溫改變過熱器內蒸汽溫度及其出口溫度,維持過熱器出口蒸汽溫度在允許范圍內,過熱器調節系統如圖1所示。主蒸汽溫度是鍋爐運行質量的重要指標之一,主蒸汽溫度過高或者過低都會明顯影響到電廠的安全性和經濟性。主蒸汽溫度過高可能造成過熱器、蒸汽管道和汽輪機的高壓部分受到損壞,主蒸汽溫度過低則會降低全廠的熱效率[4]。
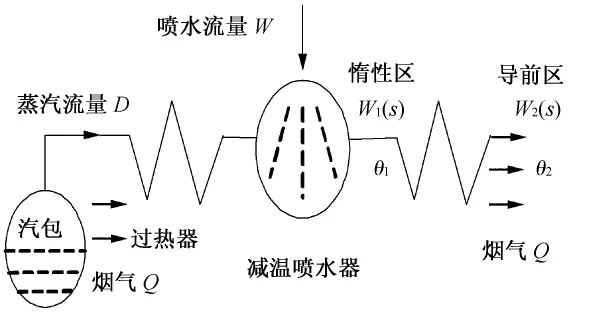
圖1 過熱蒸汽調節系統原理圖
影響過熱器出口蒸汽溫度變化的原因很多,例如蒸汽流量變化、燃燒工況變化、鍋爐水溫變化、進入過熱器蒸汽溫度變化、流經過熱器煙氣溫度變化和流速變化、鍋爐受熱面結垢等,其中起主導作用的是蒸汽流量和減溫水量[5]。過熱汽溫對象動態特性表現為大慣性、大遲延,并且具備自平衡能力。此外,主蒸汽溫度對象動態特性隨著運行工況的變化而變化,具有不確定因素。目前,廣泛應用的PID調節的噴水減溫的方法,這種方法的缺點是使主蒸汽溫度對象特性具有很大的遲延和慣性[6]。
2 干擾觀測器設計
2.1 干擾觀測器原理
干擾觀測器的基本思路是將外部力矩干擾和模型參數變化造成的實際對象與名義模型輸出的差異等效到控制輸入端,即觀測出等效干擾。在控制中引入等效的補償,從而實現對干擾的完全抑制。
干擾觀測器框圖如圖2所示。
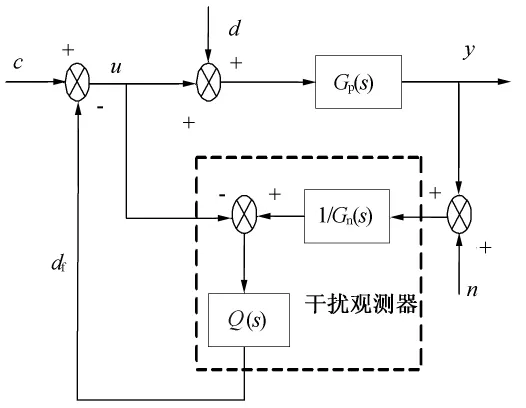
圖2 干擾觀測器原理圖
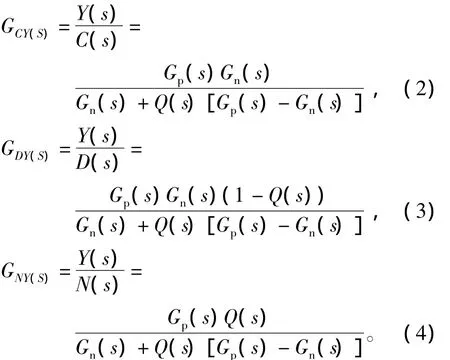
在圖2中,Gp(s)為被控對象的傳遞函數,Gn(s)為名義模型傳遞函數,d為等效干擾,u為控制輸入,c為PID的輸出,df為干擾的估計值,Q(s)為低通濾波器。控制器的輸出為

式中c為PID控制器的輸出;df為干擾的估計值。
由圖2可得到如下表達式為
2.2 低通濾波器的設計
Q(s)的設計是干擾觀測器設計過程中的1個非常重要的環節。第一,為使Q(s)G-1n(s)正則,Q(s)相對階應不小于1/Gn(s)的相對階;第二,Q(s)帶寬的設計應該是在干擾觀測器的魯棒穩定性和干擾抑制能力之間的折中[7]。
設Gp(s)的名義模型為Gn(s),則不確定對象的集合可以用乘積攝動來描述,即

式中Δ(s)是可變的傳遞函數。根據魯棒穩定性原理,干擾觀測器Q(s)穩定的充分條件為

通過Q(s)的設計,可以實現魯棒性的要求。
忽略非建模和不確定性等因素的影響,Gn(s)可描述為

式中Jn為等效慣性力矩;bn為等效阻尼系數。
Q(s)的選擇應折中考慮系統的抗干擾性能、魯棒性和抑制噪聲的因素。
設計Q(s)時需要根據具體的控制系統進行合理的選擇。常用的一種設計Q(s)方法就是令Q(jw)的右邊的斜率和1-Q(jw)在高頻區域內的斜率相等。在頻域內在低頻區域的斜率
最優的Q(s)是通過斜率相等得到的,可得

3 仿真結果分析
以某電廠300 MW機組的主汽溫度為控制對象,其模型為

采用如下式的低通濾波器,則

式中τ=0.001。
根據提出的方法,設計的Matlab的仿真模型如圖3所示。
為了說明干擾觀測器PID控制策略相對常規控制方法的優越性,同時做了常規PID控制的仿真研究。其階躍響應結果如圖4、圖5所示。
通過上面仿真曲線比較可知,在正常工況下,干擾觀測器PID在控制精度、穩定時間、超調量、自適應等動靜態指標都優于常規PID控制。
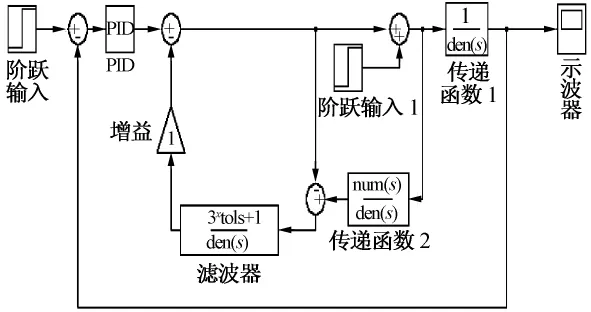
圖3 Matlab仿真模型
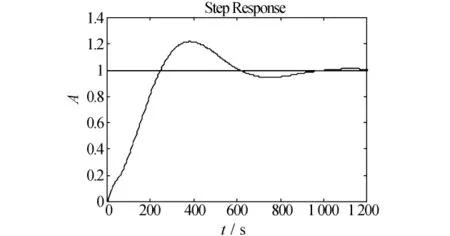
圖4 常規PID階躍響應
4 結論
仿真研究表明,基于干擾觀測器的PID控制算法應用于具有遲延、時變和不確定等特性的火電廠主蒸汽溫度控制系統中,其控制效果優于常規的PID控制,能適應對象參數的變化并表現出良好的控制品質,具有較強的魯棒性和自適應能力。
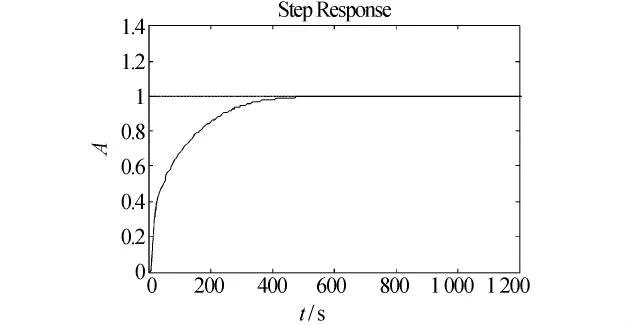
圖5 帶干擾觀測器PID階躍響應
[1] 邊力秀.熱工控制系統[M].北京:中國電力出版社,2001.
[2] 劉吉臻,李建強,張栗英,等.用RBF網絡整定的電廠主汽溫PID串級控制系統[J].動力工程2006,26(1):89-92.
[3] 黃忠霖.控制系統MATLAB計算及仿真[M].北京:國防工業出版社,2006.
[4] 王沛然.主汽溫新型控制系統設計與研究[D].北京:華北電力大學,2005.
[5] 劉志遠,呂劍虹,陳來九.智能PID控制器在電廠熱工過程控制中的應用前景[J].中國機工程學報,2002,22(8): 128-134.
[6] V I Utkin.Sliding mode control design principles and applications to edleetric drives[J].IEEE.Trans,Ind.Eleetron,1993,40(1): 23-36.
[7] 丁新平,楊俊友,孫榮斌.基于干擾觀測器PID控制的磁懸浮系統[J].沈陽工業大學報,2005,27(3):288-290.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03