永磁無刷直流電機控制的建模仿真
2011-03-17 12:25:54江蘇省常熟職業教育中心何志強
湖北農機化 2011年3期
關鍵詞:模型
江蘇省常熟職業教育中心 何志強
永磁無刷直流電機系統采用雙閉環 (速度環、電流環)控制。其中速度環采用PID控制,其優點在于:可根據不同的運行條件,在保證系統控制精度的前提下,達到提高系統快速性且確保控制魯棒性的目的。電流環仍然沿用傳統的PID控制,可滿足控制要求。
在Matlab/Simulink下,根據模塊化建模的思想,圖1即為在Matlab/Simulink下無刷直流電機控制系統的整體仿真框圖。其中包含:無刷直流電機本體模塊、速度環調節模塊、電流環調節模塊、轉速給定模塊和電壓給定模塊等。
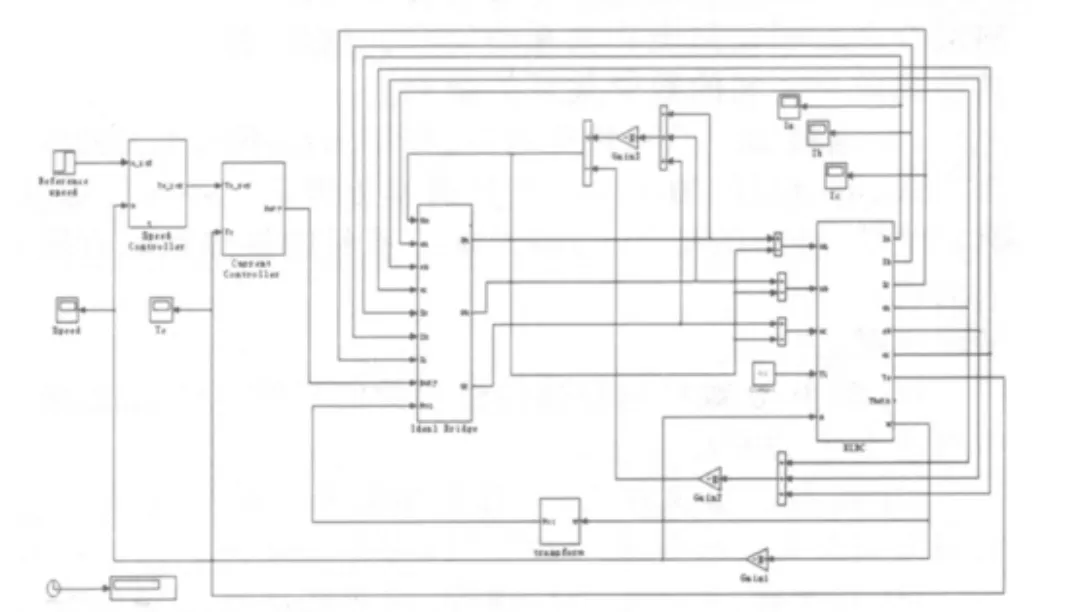
圖1 無刷直流電機控制系統的整體仿真框圖
1 無刷直流電機本體模塊


進一步簡化為:

根據式(2)和式(3)即可得到兩相導通時的電機模型。
當兩相導通時,電流從相流到相,為負值。因電機三相繞組對稱,可用此方法建立兩相導通時的仿真模型,運行時根據位置信號來切換各個模型即可。
換相邏輯模塊的主要作用是根據電機轉子位置來決定讓哪個繞組通電,從而給這兩相加上相應的電壓。本文采用M函數,根據電機輸出的轉子位置電角度來選擇讓哪兩相的電機模型通電,從而模擬電機運行時三相繞組的通電、斷電。
2 機械運動模塊
機械運動模塊中,模塊輸入為總的電磁功率,通過加乘模塊即可求得電磁轉矩信號,最后得到電機轉速信號。
3 電流控制模快
考慮到電機換向時電流有脈動,所以選取三相電流中絕對值最大的一個作為反饋電流。電流控制模塊的結構較為簡單,電流調節采用傳統的PI調節,電流誤差信號經過PI調節后限幅輸出得到電機的輸入電壓。
4 仿真結果
仿真用的電機模型參數為:星型連接,額定電壓,額定轉速,定子相繞組自感,轉動慣量。進行無刷直流電機雙閉環控制仿真,其中電流PI環節中得到電機轉速的仿真結果,如圖2所示。

圖2 轉速仿真結果
另外,給出無刷直流電機雙閉環控制仿真中得到動態電磁轉矩、相電流波形,如圖3所示。
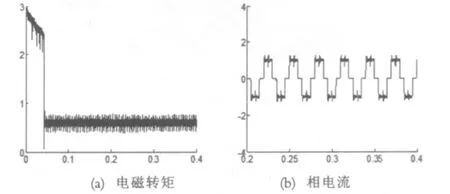
圖3 電磁轉矩和電流的仿真結果
在仿真實驗過程發現,電流環中的PI控制器參數、對系統也有影響,應適當選擇這2個參數以獲得最佳的PI控制特性。通過仿真結果,可以發現,本文的無刷直流電機控制系統的響應速度快、調節精度高、穩態性能好,實現了建模仿真的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
