伺服環路控制器的數字化設計
2011-03-28 01:52:34羅黎希王小兵周陽輝
電子設計工程 2011年16期
羅黎希,王小兵,周陽輝
(中國衛星海上測控部江蘇江陰214431)
某船載衛通站伺服系統環路控制由傳統的模擬電路實現,封裝在環路控制單元抽屜和陀螺控制單元抽屜。環路控制是衛通伺服系統的關鍵環節,而模擬電路存在分立元件多、器件漂移、抗干擾能力差、變量不易監視等缺點,直接影響了衛通站伺服系統的可靠性。
利用計算機代替常規的模擬控制器形成計算機控制系統是控制工程的發展方向。由于計算機具有很強的計算能力、比較及存儲信息的能力,因此它可以實現模擬系統難以實現的復雜控制規律,有效解決漂移、干擾等問題,同時還能獲得友好界面。利用計算機控制系統實現伺服環路的數字化可以有效解決模擬電路存在的問題,提高通信系統的穩定性。
1 原理簡介
對象,以及連接兩部分的模-數(A/D)轉換器、數-模(D/A)轉換器及實時時鐘所組成,如圖1所示[1]。計算機通過軟件實現所設計的控制規律,數字化的輸入信號經特定算法處理后在進行數模轉換,送至被控對象,使系統達到預定的指標。

圖1 計算機控制系統硬件框圖Fig.1 Hardware frame of computer control system
2 模擬控制器的數字化
該衛通站伺服子系統由雙閉環消隙交流功放、陀螺穩定(含前饋補償)環、搜索位置環、快速數引環、自跟蹤環、寬帶自跟蹤環、軸角編碼、上、下位計算機、極化控制、鎖定控制等組成,各環路均利用模擬電路實現。
計算機控制系統由硬件和軟件兩大部分組成。硬件部分主要由工作于離散狀態下的計算機,工作于連續狀態的被控
2.1 模擬控制器電路
模擬環路電路由傳統的運算放大器、電阻和電容等基本元件組成。模擬環路電路是天線伺服系統的校正環節,為系統附加一些具有典型環節特性的電網絡、運算部件等,有效地改善整個系統的控制性能。圖2是衛通站快速數引環的校正電路,通過數學計算可以求解出該校正電路的傳遞函數,其他環路與數引環類似。

圖2 模擬環路電路圖Fig.2 Circuit of analog loop
利用運放輸入端虛斷和虛短特性,結合基爾霍夫電流定理,可寫出運放N1兩端電路的微分方程組(1)[2]。

微分方程的求解比較復雜,且不利于環路控制特性分析,因此采用拉氏變換將方程組變形為方程組(2),以便求解環路傳遞函數。

令V調零(t)=0,且可以利用方程組(2)求解出運放N1電路的傳遞函數公式(3)。

通過同樣的步驟可以求得運放N2電路的傳遞函數公式(4),其中C3為濾波電容。


2.2 數字控制器算法設計
天線模擬控制器是連續系統利用經典的控制方法得出的,如頻率特性法、根軌跡法等。選擇足夠高的采樣頻率,計算機控制系統可以近似地看作連續系統,通過模擬化設計方法設計數字控制器,即用離散時間控制器近似連續時間控制器,對D(s)進行離散化,得到能由計算機實現的控制算法D(z)[3]。
采用零階保持器法,將模擬控制器進行離散化。其過程如圖3所示,D(z)可以通過公式(6)計算。如果D(s)是穩定的,那么D(z)也是穩定的;但D(z)與D(s)單位沖激響應不同。

圖3 零階保持器法離散控制器過程Fig.3 Process of discrete controller using zero-order holder method


將公式(7)進行變換,就可以得到差分方程公式(8)。

公式(8)即為計算機實現的控制算法,其中e(kT)為輸入序列,u(kT)為輸出序列,經過計算機語言編程可以輕松實現數字控制器。
2.3 采樣周期的選擇
采樣周期影響天線的控制穩定性和準確性,因此選擇合適的采樣周期是非常重要的。香農定理給出了理想情況下的采樣周期選擇規則,但天線控制系統比較復雜,采樣周期的選擇與很多因素相關。在計算機控制系統實現數字化控制的情形下,模數轉換需要使用零階保持器電路,該電路之后連接連續時間系統會引起系統相移。當采樣周期較短時,零階保持器可展開為[4]。

由公式(9)可以看出,零階保持器可以被近似為具有半個采樣周期的延時環節。工程經驗給出法則:乃奎斯特頻率取連續系統剪切頻率的5~20倍[5]。
衛通天線速度環即為控制器的控制對象,速度環的剪切頻率為4~5 Hz,采樣頻率可選為20~50 Hz,具體數據可根據計算機的硬件配置情況選擇。
3 計算機仿真測試
3.1 仿真系統模型
為了驗證數字控制器設計的正確性,利用Matlab軟件Simulink工具箱進行計算機仿真[6]。建立仿真系統首先應確定被控對象的數學模型,由于從控制器輸出到天線轉角經歷了功放、電機、減速器和天線體等多個環節,被控對象的模型非常復雜。在實際設計過程中,通過測試天線的頻響特性來估計被控對象模型。根據工程經驗,被控對象可近似為兩個振蕩環節,由于系統設計帶寬較低,頻率較低的振蕩環節對控制系統影響很大,而頻率較高的振蕩環節可忽略。因此被控對象可看作一個二階振蕩環節。
控制器電路中,各元器件的參數如下:R6=33 kΩ,R7=33 kΩ,R9=33 kΩ,R10=1 MΩ,R11=33 kΩ,R13=1 MΩ,C1=0.47 μF,C2=4.7 μF。可根據參數寫出模擬控制器的傳遞函數D(s)=取采樣時間T=0.02 s利用公式(4)求出數字控制器建立仿真模型如圖4所示。
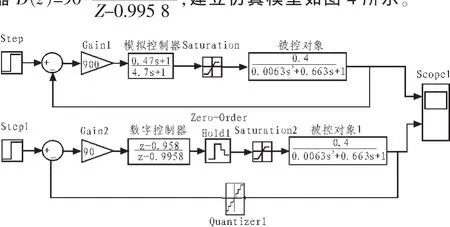
圖4 分別由模擬控制器和數字控制器構成的天線模型Fig.4 Antenna model of analog controller and digital controller
3.2 測試結果
設模擬控制器構成的控制系統為a系統,數字控制器構成的系統為b系統,系統輸入均為單位階躍函數,b系統的輸入函數、量化器、零階保持器采樣時間均設為0.02 s。利用雙通道示波器同時觀察系統輸出,仿真結果如圖5,由仿真結果可以看出,b系統的輸出與a系統基本一致,數字控制器可以替代模擬控制器。
4 結束語

圖5 兩種模型的輸出結果對比Fig.5 Comparison between two models
為了提高衛通天線伺服系統的穩定性和可靠性,本文分析了伺服環路的模擬控制器電路,利用計算機控制系統相關技術,將模擬控制器設計為數字控制器。通過Matlab軟件Simulink工具包的仿真計算,證明了數字控制器設計的正確性。根據本文提出的算法,結合計算機語言,可以將伺服環路中所有模擬環節數字化,以提高天線伺服系統的穩定性和可靠性。
[1] 董景新,趙長德,熊沈蜀,等.控制工程基礎[M].2版.北京:清華大學出版社,2003.
[2] 藤井信生.電子實用手冊[M].北京:科學出版社,2001.
[3] 丁鋒,屈明昌.交流伺服系統控制方法[J].電子機械工程,2003,6(4):87-89.DING Feng,QU Ming-chang.Control method of AC servo system[J].Electronic Mechanical Engineering,2003,6(4):87-89.
[4] 管致中,夏恭恪,孟橋.信號與線性系統[M].北京:高等教育出版社,2005.
[5] 蔣大明,戴勝華.自動控制原理[M].北京:北方交通大學出版社,2003.
[6] 趙長德,郭美鳳,董景新,等.控制工程基礎實驗指導[M].北京:清華大學出版社,2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
趣味(數學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2017年20期)2018-01-03 06:26:40
