基于扭桿擺的汽車動力總成慣量參數(shù)測量實現(xiàn)
2011-04-26 02:32:04查佳韻程金華程長洪
中國測試 2011年2期
關(guān)鍵詞:測量
查佳韻,劉 勇,程金華,程長洪
(東風汽車集團股份有限公司技術(shù)中心,湖北 襄樊 441004)
0 引 言
現(xiàn)在常用三線擺法或復擺法測量汽車動力總成的慣量參數(shù)。根據(jù)三線擺或復擺的測量原理,動力總成各種姿態(tài)下的質(zhì)心必須通過擺的轉(zhuǎn)軸(或者添加配重塊使動力總成質(zhì)心通過擺的轉(zhuǎn)軸),由于測試姿態(tài)較多,動力總成質(zhì)量較大,加之其外形也不規(guī)則,因此使得測試工作變得繁瑣耗時,且測量精度較低。同時,三線擺或是復擺的高度較高,占地面積較大,結(jié)構(gòu)比較松散,給操作上也帶來諸多不便[1-3]。
為提高測試的效率與精度,研發(fā)了一種基于扭桿擺的慣量測試設備。該設備結(jié)構(gòu)緊湊,操作方便,能在1臺設備上實現(xiàn)對汽車動力總成的質(zhì)量、質(zhì)心位置、轉(zhuǎn)動慣量和慣性積等參數(shù)的測量,而且動力總成各種姿態(tài)可任意放置,無需調(diào)整,得到的測量結(jié)果具有較高精度。
1 慣量測試系統(tǒng)組成
測量系統(tǒng)結(jié)構(gòu)示意圖如圖1所示,主要由扭桿、軸承、升降裝置、稱重平臺、稱重探頭、光電傳感器、擺動平臺、底座以及稱重傳感器等組成。測量系統(tǒng)有稱重狀態(tài)與擺動狀態(tài)兩個工作狀態(tài)。稱重狀態(tài)時,升降裝置頂起稱重平臺,稱重探頭伸出與稱重傳感器接觸,然后升降裝置降下與稱重平臺脫離接觸,此時稱重平臺、擺動平臺及動力總成的重量全部落在3套稱重傳感器上,從而獲得動力總成質(zhì)量及總成偏離轉(zhuǎn)軸中心距離;擺動狀態(tài)時,升降裝置頂起稱重平臺,退回稱重探頭,然后升降裝置降下,使稱重平臺落在底座上,自擺動平臺給予扭桿激勵,帶動動力總成擺動,由周期測量裝置測量擺動周期。
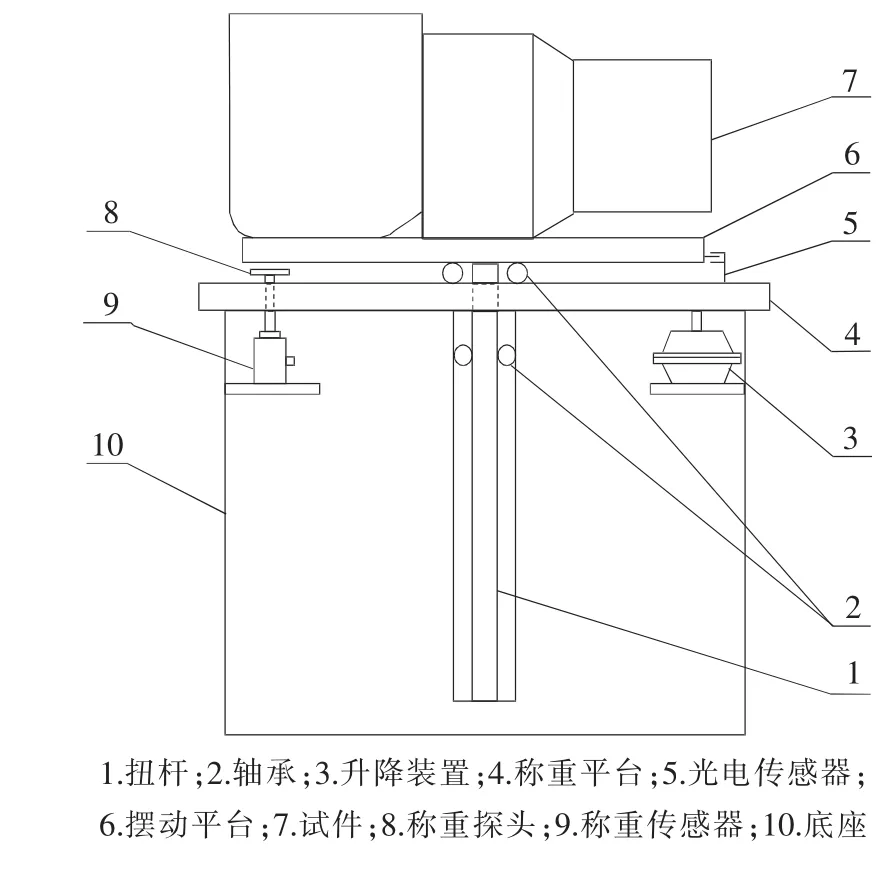
圖1 轉(zhuǎn)動慣量測試裝置示意圖
2 系統(tǒng)原理
2.1 轉(zhuǎn)動慣量參數(shù)測量原理[4-5]
轉(zhuǎn)動慣量可通過測量扭擺系統(tǒng)的自由擺動周期來計算。若不考慮系統(tǒng)阻尼,則

式中:I——試件及測試平臺對轉(zhuǎn)軸OH的轉(zhuǎn)動慣量,kg·m2;
K——扭桿剛度系數(shù),N·m/rad;
T——扭桿擺系統(tǒng)自由擺動周期,s。
其中,K可以通過對標準件的標定計算得到。因此,只要測量出扭桿擺的擺動周期T,就可以計算扭桿擺及發(fā)動機總成組合繞扭桿擺軸的轉(zhuǎn)動慣量I為

若動力總成的質(zhì)心通過轉(zhuǎn)軸OH(見圖2),則動力總成繞OH軸的轉(zhuǎn)動慣量為

式中:IH——動力總成過其質(zhì)心的轉(zhuǎn)動慣量;
α,β,γ——旋轉(zhuǎn)軸OH與動力總成坐標軸Ox,Oy,Oz的夾角;
Ixx,Iyy,Izz和Ixy,Iyz,Ixz——動力總成繞其坐標軸的3個慣量矩和3個慣性積。
由IH的計算式可知,要得到慣性張量的全部6個值,至少需要測量總成6種不同狀態(tài)的轉(zhuǎn)動慣量,一般則測試10~12個姿態(tài)的數(shù)據(jù)進行擬合計算,以提高測試結(jié)果精度。
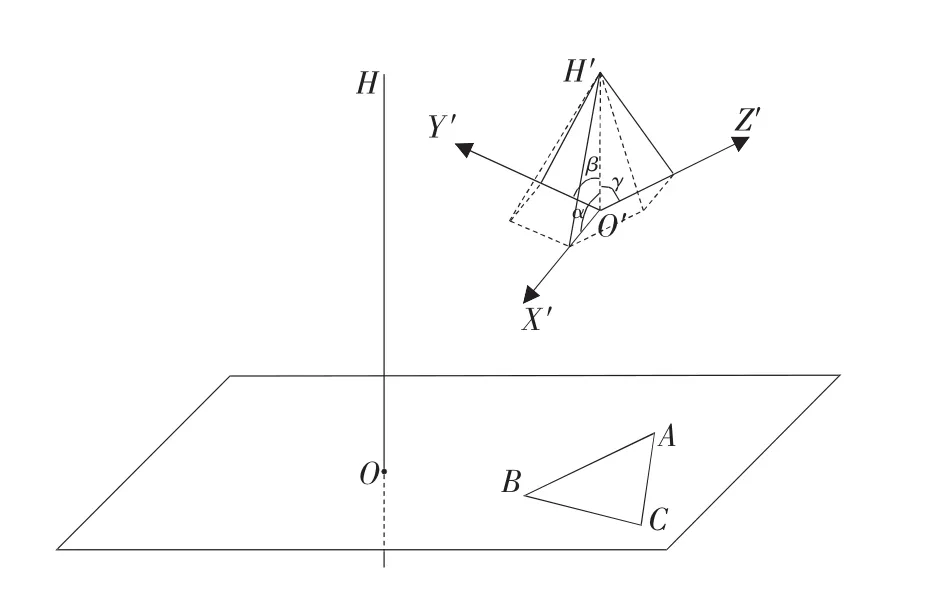
圖2 汽車動力總成坐標系O′X′Y′Z′與測試臺轉(zhuǎn)軸OH的夾角α β γ示意圖
通過扭桿擺系統(tǒng)測得的轉(zhuǎn)動慣量I不但包括發(fā)動機總成的轉(zhuǎn)動慣量,還包括扭桿擺系統(tǒng)自身的轉(zhuǎn)動慣量。通過式(4),得到過發(fā)動機總成質(zhì)心繞扭桿擺轉(zhuǎn)軸的轉(zhuǎn)動慣量IH為

其中:I——扭桿擺系統(tǒng)及總成轉(zhuǎn)動慣量測量值;
I0——扭桿擺的轉(zhuǎn)動慣量,也稱皮轉(zhuǎn)動慣量;
m——發(fā)動機總成的質(zhì)量;
Rm——發(fā)動機總成質(zhì)心的投影到轉(zhuǎn)軸OH的距離。
于是有

2.2 空間姿態(tài)角的測取
為了測量發(fā)動機總成坐標系各軸與扭桿擺轉(zhuǎn)軸之間的空間夾角α,β,γ,需要依靠總成的數(shù)模或者借助三坐標儀。
首先建立總成試件的坐標系(只在首個姿態(tài)建立坐標系),在總成試件上確定至少3個特征點(為了可以讓總成試件任意放置各種姿態(tài)后都可以方便測量,最好多找一些點),給出這些特征點相對于總成試件坐標系的坐標,比如特征點D1(XD1,YD1,ZD1),D2(XD2,YD2,ZD2)等,另外在測量平臺上也確定3個特征點A,B,C。然后用三坐標儀測量試件上的特征點到平臺上的點的距離,便可以得到一個三元二次非線性方程組,利用Matlab編程求解這個方程組可以將平臺上的點相對于發(fā)動機坐標求出,進而得到α,β,γ。
在圖2中,平移轉(zhuǎn)軸OH至試件坐標系中O′H′位置,α,β,γ 分別為試件坐標 OX′、OY′、OZ′與轉(zhuǎn)軸O′H′的夾角,則單位向量 O′H′在試件坐標系 O′X′Y′Z′中可以表示為(cosα,cosβ,cosγ)。由于單位向量 O′H′垂直于平面ABC,于是有
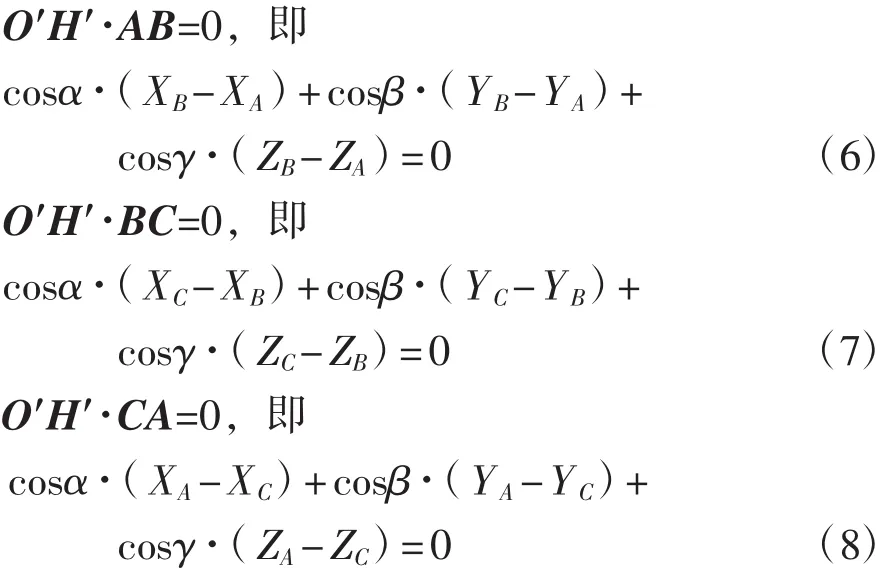
聯(lián)立式(6),式(7),式(8)求解,即可求得 cosα,cosβ,cosγ。
2.3 偏心距的測取
動力總成偏離扭桿擺轉(zhuǎn)軸的距離利用稱重測試平臺完成[6]。稱重平臺包含3個圓周均布的稱重傳感器M1,M2,M3。建立稱重測試平臺坐標系如下:平臺中心O與M1傳感器中心的連線為測試平臺坐標系的X軸,Z軸通過O且與測試平臺平面垂直向上,測試平臺坐標系符合右手定則,如圖3所示。設總成質(zhì)心投影在OXY平面內(nèi)C點,則根據(jù)力平衡原理有

在平面OXY內(nèi)對OX取矩可得總成試件在OXY平面內(nèi)的y向質(zhì)心yc為

在平面OXY內(nèi)對OY取矩可得總成試件在OXY平面內(nèi)的x向質(zhì)心xc為

于是,總成試件質(zhì)心投影在扭桿擺測試平臺上偏離轉(zhuǎn)動中心的距離ΔR為

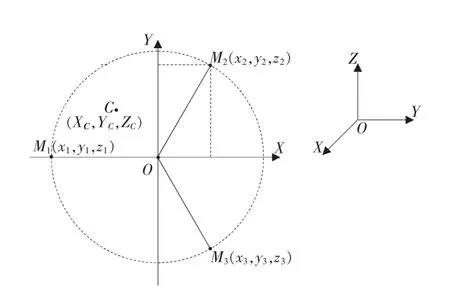
圖3 測試平臺坐標系
2.4 慣性主軸及方向余弦
在動力總成上建立曲軸坐標系OXYZ坐標系,O為發(fā)動機質(zhì)心,X軸平行于發(fā)動機曲軸軸線,Z軸垂直向上,Y軸由右手定則確定。
動力總成坐標系中的慣性參數(shù) Ixx,Iyy,Izz,Ixy,Iyz,Izx通過扭桿擺系統(tǒng)測試計算得到,按如下方法可以求出主慣性矩Ixp,Iyp,Izp及主慣性矩在動力總成坐標系中的方向余弦。構(gòu)造慣性矩矩陣[S]為
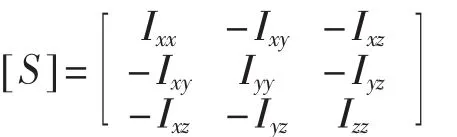
當慣性積 Ixy,Iyz,Izx分別為零時,矩陣[S]變?yōu)閇S′],即
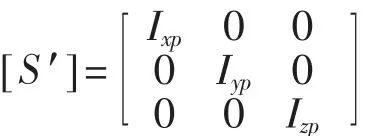
此時 Ixp,Iyp,Izp即為主軸慣性矩。對比[S]與[S′],求解[S]矩陣的標準特征值,所得到的3個特征值即為主慣性矩,特征值所對應的模態(tài)向量即為相應的主慣性軸的方向余弦。
2.5 方程組最小二乘法
對測試數(shù)據(jù)采用方程組最小二乘法進行擬合處理[7-9]。慣量參數(shù)由求解線性方程AX=I得到,其中有
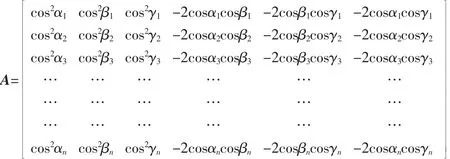
X=[IxxIxyIzzIxyIyzIxz]T為待求的慣性參數(shù),亦稱慣性張量;
I=[IH1IH2IH3… IHn]T為通過總成試件質(zhì)心的不同軸的轉(zhuǎn)動慣量。
假設產(chǎn)生 n(n≥6)次測量,即有

式(13)是一個超定方程。為進行方程求解,采用最小二乘法。在方程兩邊左乘ATn×6,則有

從而方程轉(zhuǎn)化為

進而可解得n次測量的慣性張量X。為減小誤差,可以利用求得的慣性張量值代入式(13)中與每次測量進行比較,然后剔除偏差大的測量值,之后重新進行最小二乘擬合,由此獲得更好的測試結(jié)果。
3 誤差分析
3.1 周期測量誤差
周期測量采用光電傳感器測量。設周期測量誤差為ΔT,所造成的轉(zhuǎn)動慣量測量相對誤差為
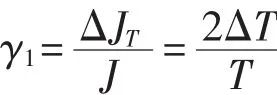
經(jīng)測試,扭桿擺空擺周期1.734s,周期測量誤差小于0.1ms,于是,轉(zhuǎn)動慣量測量相對誤差為
3.2 質(zhì)心偏移誤差
由于加工、裝配以及稱重傳感器誤差的原因,定位動力總成質(zhì)心偏離扭桿擺轉(zhuǎn)軸的距離R時會存在誤差ΔR,依據(jù)平行軸定理,所造成的轉(zhuǎn)動慣量測量相對誤差為
設最大定位誤差ΔR=10mm,以某質(zhì)量為200.4kg,轉(zhuǎn)動慣量為3.461 5 kg·m2的標準件為例,相對誤差為
3.3 阻尼誤差
采用的扭桿擺系統(tǒng),存在機械摩擦、空氣阻力以及扭桿變形等因素影響周期[10-11],使得系統(tǒng)形成有阻尼的振動,其振動方程為

求解方程有

式中:θ——扭擺角;
β——與阻尼相關(guān)的系數(shù);
綜上所述,總誤差為

圖4 方形標準塊UG模型

圖5 方形標準塊標定
4 標準塊實例
測量目的是要獲得汽車動力總成的慣性矩與慣量積參數(shù),這些參數(shù)是通過測試手段與程序計算獲得的,因此需要對測試方法與相關(guān)的軟件計算程序進行驗證。現(xiàn)在利用一個方形標準塊進行慣量參數(shù)計算程序的驗證,然后將驗證結(jié)果與標準塊的數(shù)模進行對比,方形標準塊的UG模型見圖4,標定系統(tǒng)見圖5。標定測試過程中,共改變方形塊10個姿態(tài),得到10組數(shù)據(jù),擬合數(shù)據(jù)如表1。
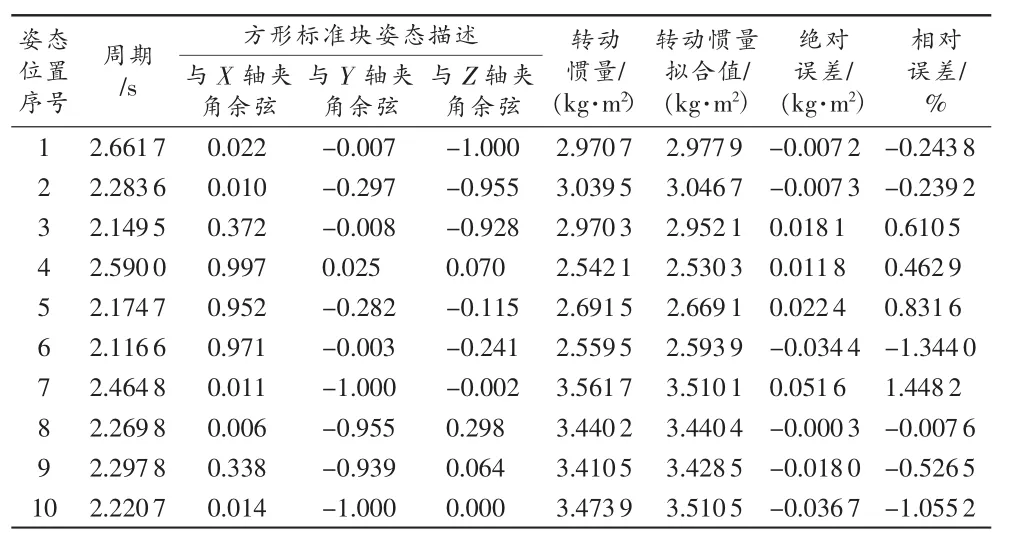
表1 標準塊慣性矩慣性積測試數(shù)據(jù)(原始擬合)
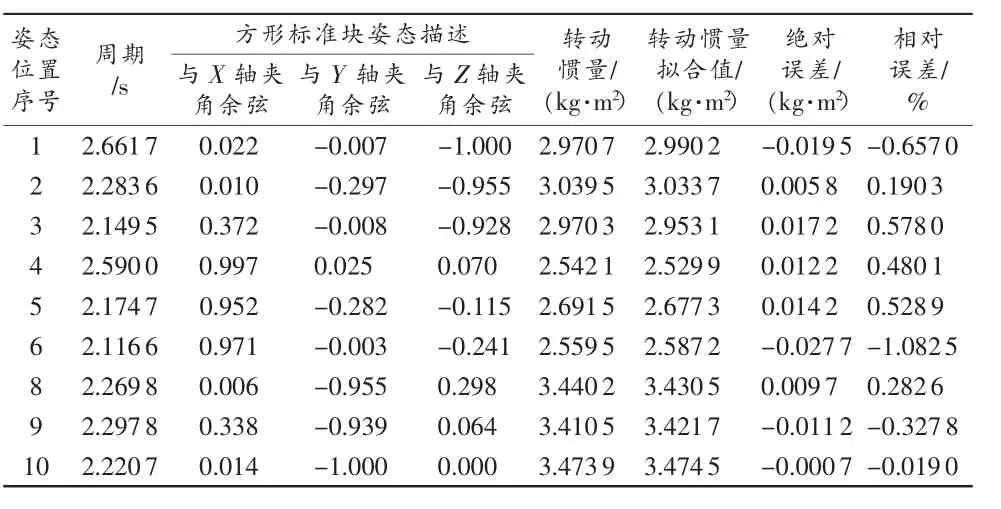
表2 標準塊慣性矩慣性積測試數(shù)據(jù)(剔除擬合)
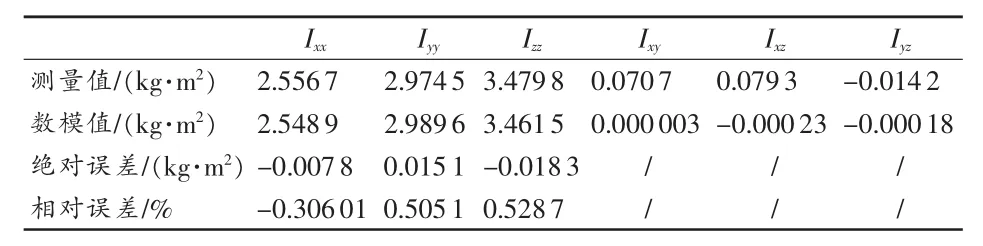
表3 標準塊測試數(shù)據(jù)與數(shù)模值對比
表1中,第7組數(shù)據(jù)擬合偏差較大,剔除該組數(shù)據(jù),重新擬合如表2。根據(jù)表2的數(shù)據(jù)計算得到方形標準塊的慣性矩、慣性積參數(shù),與方形標準塊的UG數(shù)模值比較,如表3所示。從結(jié)果數(shù)據(jù)看,驗證得到的數(shù)據(jù)結(jié)果與數(shù)模值吻合良好(由于標準方塊的慣性積數(shù)值本身很小,在此不進行誤差計算),說明測試方法與計算軟件正確。
5 結(jié)束語
設計的基于扭桿擺的汽車動力總成慣量參數(shù)測量裝置,克服了三線擺等測量方式操作繁瑣耗時的缺點,可以將總成任意位置放置,操作簡便,且慣量參數(shù)測試結(jié)果精度較高,具有較好的實用性。
[1] 劉振東,鄭桂梅,孫興川.基于扭擺法的轉(zhuǎn)動慣量測量[J].河南科學,2008,26(10):1181-1185.
[2] 李惠彬,劉海光,劉吉春.發(fā)動機動力總成慣性參數(shù)的扭擺測試研究[J].計量與測試技術(shù),2007,34(6):52-54.
[3]郭長立,李三慶.落體法測剛體轉(zhuǎn)動慣量的測量方法比較[J].力學與實踐,2005,27(3):69-72.
[4] 丁雪松,李慧鵬,王軍,等.高精度轉(zhuǎn)動慣量測量設備的研制[J].計量技術(shù),2007(9):12-15.
[5]袁昌盛,宋筆鋒.改進復擺法測量轉(zhuǎn)動慣量的方法和設備研究[J].中國機械工程,2006,17(6):598-600.
[6] 吳斌,馬貴賢,彭敏燕,等.衛(wèi)星轉(zhuǎn)動慣量測量方法的研究[J].宇航計測技術(shù),2008,28(2):21-23.
[7] 呂振華,羅捷,范讓林.汽車動力總成懸置系統(tǒng)隔振設計分析方法[J].中國機械工程,2003,14(3):265-269.
[8] 鮑曉東,侯勇.汽車動力總成懸置系統(tǒng)解耦設計研究[J].西安科技大學學報,2007,27(3):490-493.
[9]唐靜.動力總成懸置系統(tǒng)在扭矩軸坐標系中的優(yōu)化[J].西華大學學報:自然科學版,2010,29(3):20-24
[10]李彤華,朱占剛,尚春民,等.扭振法測彈體轉(zhuǎn)動慣量的誤差分析[J].長春理工大學學報:自然科學版,2007,30(3):63-66.
[11]唐應時,肖啟瑞,李雪鵬,等.車輛復雜外形零部件轉(zhuǎn)動慣量測量研究與誤差分析[J].現(xiàn)代制造工程,2009(6):81-84.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
